 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Геометрія задньої поверхні різального інструменту
|
|
Геометрія задньої поверхні різального інструменту характеризується формою задньої поверхні з розташованою на ній різальною кромкою і положенням задньої поверхні щодо поверхні різання.
Положення задньої поверхні задається в інструментальній системі координат XYZ. У загальному випадку у вибраній системі координат XYZ положення статичної площини різання в досліджуваній точці різальної кромки визначається вектором швидкості головного руху різання `V і вектором, дотичним до різальної кромки. Положення задньої площини визначається вектором `R і вектором  , розташованим в задній площині. Положення вектора залежить від форми задньої поверхні. У загальному випадку в системі XYZ вектори `R ` V і
, розташованим в задній площині. Положення вектора залежить від форми задньої поверхні. У загальному випадку в системі XYZ вектори `R ` V і  будуть:
будуть:
 , (3.46)
, (3.46)
 , (3.47)
, (3.47)
 . (3.48)
. (3.48)
Вектор нормалі  до площини різання буде:
до площини різання буде:
 , (3.49)
, (3.49)
 . (3.50)
. (3.50)
Вектор нормалі  до задньої площини буде:
до задньої площини буде:
 , (3.51)
, (3.51)
 . (3.52)
. (3.52)
Кут між нормаллю до площини різання і нормаллю до задньої площини, в досліджуваній точці різальної кромки, буде рівний задньому куту aн в нормальному перетині.
Відповідно до цього кут aн буде рівний:
 . (3.53)
. (3.53)
Скалярний добуток векторів і буде дорівнювати:
 . (3.54)
. (3.54)
Модуль вектора нормалі до поверхні різання буде:
 . (3.55)
. (3.55)
Модуль вектора нормалі до задньої площини в досліджуваній точці різальної кромки, буде:
 . (3.56)
. (3.56)
Статичний задній кут aн в нормальному до різальної кромки перетині буде дорівнювати:
 . (3.57)
. (3.57)
Задній кут aн в нормальному до різальної кромки перетині може бути визначимо також по залежності:
 . (3.58)
. (3.58)
Векторний добуток векторів і буде:
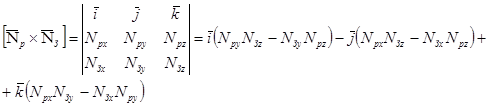 . (3.59)
. (3.59)
Модуль векторного добутку 
 . (3.60)
. (3.60)
Задній кут aН в нормальному до різальної кромки перетині буде дорівнювати:
 . (3.61)
. (3.61)
Дата публикования: 2015-10-09; Прочитано: 243 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
