 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Теорема про додавання прискорень 4 страница
|
|
 ;
;  ;
;  .
.
Кутові прискорення ланок визначимо за формулами:
 ;
;  ;
;  .
.
Покажемо їх напрямки на кінематичній схемі.
Питання для самоконтролю
1. Послідовність побудови плану прискорень.
2. Які вихідні дані мають бути при побудові плану прискорень?
3. Як визначаються прискорення точок ланки в її плоскопаралельному русі?
4. Як визначаються прискорення точок кривошипа? У випадку, якщо він обертається рівномірно?
5. Як визначаються за величиною та напрямком нормальні складові відносно-обертальних прискорень?
6. Як визначаються кутові прискорення ланок механізму (величина та напрямок)?
7. Як визначити дійсні прискорення ланок механізму, маючи план прискорень?
Лекція № 21
Тема: “Кінематичний аналіз шарнірно-важільних механізмів аналітичним методом та методом кінематичних діаграм і їх синтез”
План
1..Кінематичний аналіз механізмів методом кінематичних діаграм.
2..Основи аналітичного методу кінематичного дослідження механізмів.
3. Завдання кінематичного синтезу плоских механізмів.
4. Умова існування кривошипа в чотириланкових механізмах.
1. Кінематичний аналіз механізмів методом кінематичних діаграм
Кінематичною діаграмою називається графічне зображення функціональної залежності між двома якими-небудь кінематичними параметрами.
На відміну від методу планів метод кінематичних діаграм дає уявлення про закон зміни відстані, швидкості й прискорення веденої ланки в залежності від кута повороту ведучої.
Цей метод дозволяє побудувати всі кінематичні діаграми по одній із них і тим самим провести повне кінематичне дослідження руху ланки, для якої побудована діаграма.
Першу діаграму можна дістати експериментально. Простіше всього побудувати діаграму переміщення в залежності від часу або кута повороту ведучої ланки.
Розглянемо метод кінематичних діаграм на прикладі. дослідження кривошипно-повзункового механізму (рис.1). Спочатку слід побудувати дванадцять його положень.
У процесі побудови знаходимо методом засічок положення точки В для 12 положень кривошипа (див. лекц.№19).
Визначивши переміщення повзуна, будуємо в довільних масштабах μφ і μs діаграму переміщень залежно від кута повороту кривошипа (рис.2).
Відрізок 1–1 дістаємо діленням дійсного переміщення повзуна із нульового положення в перше на масштаб переміщення, відрізок 2–2 – із нульового в друге і т.д. Масштаб побудови обчислюємо за формулами:
 ,
,  ;
;  ,
,  ;
;  ,
,  .
.
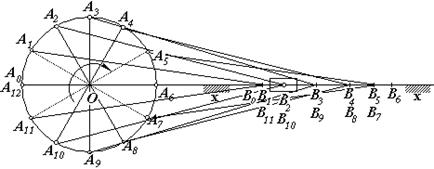
Рис.1
Для того щоб дістати закони зміни швидкості й прискорення повзуна від кута повороту кривошипа використовується графічне диференціювання.
Існують такі методи графічного диференціювання:
1) дотичних;
2) хорд.
1. Метод дотичних
Відомо, що швидкість будь-якої точки дорівнює першій похідній від відстані за часом:
 або
або  .
.
Для побудови діаграми швидкостей методом дотичних у точках 1, 2, 3, … до кривої s=f(t) проводимо дотичні.
Нижче креслимо координатні осі v – φ. Вліво від початку координат на продовженні осі абсцис обираємо за полюс точку Р1 на довільній відстані Н1, і через неї проводимо паралельно дотичним промені Р11¢, Р12¢, Р13¢,... до перетину з віссю ординат. Перетин горизонтальної прямої 1¢1¢ з серединою інтервалу дасть середнє значення швидкості на даному інтервалі в масштабі:
 .
.

Рис.2
Замірявши на діаграмі швидкостей ординати в кожному положенні й помноживши їх на масштаб μv, дістанемо дійсні значення швидкостей повзуна у всіх положеннях механізму.
Для побудови діаграми прискорення скористаємось залежністю:
 або
або  .
.
На основі цієї залежності прискорення можуть бути отримані графічним диференціюванням кривої  .
.
Побудова ведеться аналогічно. Масштаб обчислюється за формулою:
 .
.
Дійсні значення прискорень повзуна в кожному положенні механізму визначаємо, перемноживши ординати на діаграмі а=а(φ) на масштаб побудови μа.
2. Метод хорд
Методом хорд виконуються дві дії:
1) графічне диференціювання;
2) графічне інтегрування.
Графічне інтегрування методом хорд є дія, обернена графічному диференціюванню. Метод графічного інтегрування дозволяє за відомим законом зміни прискорення веденої ланки побудувати залежності швидкості й переміщення від кута повороту кривошипа.
Графічне диференціювання методом хорд проводиться аналогічно диференціюванню методом дотичних. Різниця полягає лише в тому, що всі дотичні заміняються хордами.
Те, що таку заміну можна здійснити, випливає із міркувань, відомих із математичного аналізу.
 Візьмемо якусь криву MN (рис.3). Оберемо на ній дві довільні точки А і В, сполучивши їх прямою, дістанемо хорду АВ.
Візьмемо якусь криву MN (рис.3). Оберемо на ній дві довільні точки А і В, сполучивши їх прямою, дістанемо хорду АВ.
Якщо цю січну переміщати, залишаючи паралельною самій собі, то нарешті вона займе положення дотичної Т–Т, причому точка дотикання С буде лежати на кривій між точками А і В. Із зменшенням відстані між точками А і В точка дотикання С буде наближатися до середини дуги АВ. Якщо відстань між точками А і В зробити нескінченно малою, то точка дотику С буде знаходитись на відстані, нескінченно малій від середини дуги АВ.
Графічне диференціювання методом хорд виконується таким чином.
 Розділимо вісь абсцис діаграми s=s(φ) на інтервали 0–1, 1–2, 2–3 і т. д. Провівши ординати кривої s=s(φ), дістанемо точки ділення на діаграмі 1, 2, 3, .... Сполучивши їх, отримаємо хорди 0–1, 1–2, 2–3, ….
Розділимо вісь абсцис діаграми s=s(φ) на інтервали 0–1, 1–2, 2–3 і т. д. Провівши ординати кривої s=s(φ), дістанемо точки ділення на діаграмі 1, 2, 3, .... Сполучивши їх, отримаємо хорди 0–1, 1–2, 2–3, ….
Обираємо нові осі координат для побудови діаграми .
Розділимо вісь абсцис на такі ж інтервали і оберемо вліво від початку координат по осі абсцис полюс Р на довільній довжині Н. Через полюс Р проведемо промені, паралельні хордам. Відрізки на осі ординат, що відтинаються цими променями, є середніми швидкостями на відповідних інтервалах.
Ординату швидкостей, яка відтинається променем Р–1¢, переносимо на середину інтервалу 0–1, ординату швидкості, що відтинається променем Р–2¢ – на середину інтервалу 1–2 і т.д. Сполучимо отримані точки плавною кривою. Маємо діаграму залежності v=v(φ) у масштабі:

Аналогічно будується залежність а=а(φ).
2..Основи аналітичного методу кінематичного дослідження механізмів
Вище розглянуті графічні методи наочні й універсальні, тому що дозволяють визначати положення, швидкості та прискорення ланок механізмів будь-якої структури. Але графічні методи не завжди мають таку точність, яка буває необхідною в деяких конкретних задачах аналізу механізмів. У цих випадках перевагу віддають аналітичним методам, за допомогою яких дослідження кінематики механізмів може бути виконано з будь-якою точністю. Крім того, аналітичні залежності дозволяють виявити взаємозв’язок кінематичних параметрів механізму з його метричними параметрами, тобто розмірами ланок.
Роль аналітичного методу за останні роки дуже зросла у зв’язку з тим, що маючи аналітичні вирази, можна завжди розробити програми для обчислювальної машини і здобути усі необхідні результати.
Розглянемо кривошипно-повзунковий механізм (рис.5).
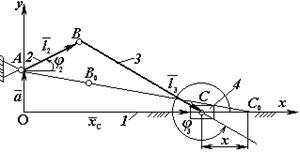
Рис.5
З метою визначення швидкостей і прискорень ланок механізму подамо контур ОАВСО як векторну суму:
 . (1)
. (1)
Проектуючи рівняння (1) на осі Ох і Оу, маємо:

 cosj2 +
cosj2 +  cosj3 = xc ,
cosj3 = xc ,
a+ sinj2+ sinj3=0. (2)
Із другого рівняння (2) маємо:
 . (3)
. (3)
Як бачимо з рисунка, вектор  може лежати тільки в першій або в четвертій четвертях, тобто cosj3 – величина завжди додатна. Підставивши значення sin j 3 (3) у перше рівняння (2), знайдемо величину переміщення:
може лежати тільки в першій або в четвертій четвертях, тобто cosj3 – величина завжди додатна. Підставивши значення sin j 3 (3) у перше рівняння (2), знайдемо величину переміщення:
 . (4)
. (4)
Щоб визначити швидкості, продиференціюємо рівняння (2) за кутом j 2, після чого отримаємо:
– sinj2 – u32 sinj3 = x¢c,
cosj2 + u32 cosj3 = 0, (5)
де  – аналог кутової швидкості w3 шатуна і
– аналог кутової швидкості w3 шатуна і  – аналог лінійної швидкості vc повзуна. Аналог швидкості u32 знаходимо з другого рівняння (5) і, підставивши його в перше, визначимо аналог швидкості повзуна x'c:
– аналог лінійної швидкості vc повзуна. Аналог швидкості u32 знаходимо з другого рівняння (5) і, підставивши його в перше, визначимо аналог швидкості повзуна x'c:
 ,
,
|

Для визначення аналогів кутового прискорення u¢32 шатуна 3 і прискорення x¢¢c повзуна 4 продиференціюємо за j2 рівняння (5):
– cosj2 – u232 cosj3 - u¢32 sinj3 = x¢¢c ,
– sinj2 – u232 sinj3 + u¢32 cosj3 = 0. (7)
Із другого рівняння знаходимо аналог кутового прискорення шатуна:
 . (8)
. (8)
Підставивши це значення u¢32 у перше рівняння (7), дістанемо аналог x¢¢c.
Дійсне значення швидкостей w3 і vc прискорень ac, e3 дорівнюють:
vc = w3 x¢c , w3 = w2 u32,
ac= w22 x¢¢c + e2 vc , e3 = w22 u¢32 + e2 u32. (9)
3. Завдання кінематичного синтезу плоских механізмів
Залежно від призначення механізму точки ведених ланок повинні мати певні траєкторії, переміщення, швидкості й прискорення. Ці параметри залежать від закону руху ведучої ланки і від параметрів кінематичної схеми, тобто розмірів ланок, які визначають його кінематичну схему. Визначення параметрів кінематичної схеми за відомими кінематичними умовами руху веденої ланки є основним завданням проектування механізмів, оскільки решта етапів проектування мають лише перевірні та допоміжні розрахунки, які дозволяють встановити можливість і доцільність реального виконання здобутої кінематичної схеми механізму.
Далі під синтезом механізмів будемо розуміти сукупність задач про визначення параметрів кінематичної схеми за заданими умовами руху ланок.
Оскільки ці умови різноманітні, то і різноманітні задачі, пов’язані з синтезом механізмів.
1. Задача відтворення заданого закону руху (заданої цільової функції). Ця задача полягає у визначенні таких параметрів кінематичної схеми, які забезпечують рух веденої ланки за заданим законом при певному законі руху ведучої ланки.
2. Задача про відтворення заданої траєкторії. Ця задача полягає у визначенні параметрів кінематичної схеми механізму, в якому одна із точок ланки, що здійснює складний рух, рухається по заданій траєкторії.
4..Умова існування кривошипа в чотириланкових механізмах
Маємо шарнірний чотириланковик ABCD, у якого довжини ланок позначена як a, b, c та d (рис.6). Потрібно визначити умови, при яких ланка AB буде кривошипом, тобто буде повертатися на кут 360°, якщо a<b<c<d. З’єднаємо точки B і D прямою та позначимо відстань BD через f. Тоді з rABD видно:
 , (1)
, (1)
а з r BCD маємо:
 , (2)
, (2)
З рівняння (1) дістаємо
 .
.
Враховуючи нерівності (2), маємо:
 ; (3)
; (3)
 . (4)
. (4)

Рис.6
Якщо ланка a повертається на кут 360°, то кут φ набуває значень від 0 до 360° і cosφ змінюється в межах від +1 до -1. Оскільки ліва частина нерівності (3) повинна бути меншою найменшого значення cosφ, а ліва частина нерівності (4) повинна бути більшою найбільшого значення cosφ, то:


З цих нерівностей маємо:


Звідси перенесенням членів отримаємо:


або


Або остаточно:
 (5)
(5)
 (6)
(6)
Нерівність (6) може бути записана так:

але вона випливає із зазначеної вище умови a<b<c<d, тобто нерівність (6) не дає ніяких нових умов.
З нерівності (5) виходить: щоб у шарнірному чотириланковику, сторони якого задовольняють умову a<b<c<d, ланка а була кривошипом, необхідно щоб сума довжин найменшої та найбільшої ланки була менша або дорівнювала сумі довжин двох інших ланок.
Питання для самоконтролю
1. Що називається кінематичною діаграмою? Які переваги та недоліки має цей метод у порівнянні з методом планів?
2. Як будується діаграма переміщень s=s(φ)?
3. Сутність методу дотичних.
4. За якими формулами визначаються масштаби швидкостей і прискорень μv та μa?
5. Як визначаються дійсні значення швидкостей і прискорень веденої ланки в усіх положеннях механізму?
6. Як визначаються дійсні швидкості та прискорення точок і кутові швидкості та прискорення ланок при аналітичному методі дослідження?
7. У чому полягають завдання кінематичного синтезу плоских механізмів?
8. Довести умову існування кривошипа в чотириланкових механізмах.
Лекція № 22
Тема: “Кулачкові механізми та їх різновиди”
План
1. Кулачкові механізми, застосування, переваги та недоліки.
2. Основні типи просторових і плоских кулачкових механізмів.
3. Основні параметри кулачка.
4. Аналіз різноманітних законів рухів штовхача.
1. Кулачкові механізми, застосування, переваги та недоліки
Кулачкові механізми застосовуються у тих випадках, коли в процесі безперервного руху ведучої ланки (кулачка) необхідно за заданим законом змінювати рух веденої ланки і особливо тоді, коли остання під час руху решти ланок повинна тимчасово зупинятися.
Такий характер руху має місце в металорізальних верстатах-автоматах, у пресах, деяких типах ножиць, у розподільних механізмах парових машин з клапанним паророзподілом, у двигунах внутрішнього згорання тощо.
До переваги кулачкових механізмів відносять їх універсальність. Надаючи кулачку ту чи іншу форму, можна дістати майже будь-який рух штовхача з будь-яким законом зміни таких параметрів, як швидкість, прискорення чи траєкторія.
Недоліками кулачкових механізмів є:наявність вищої пари, а отже, значного питомого тиску, що викликає швидке спрацювання кулачків (для запобігання спрацювання кулачки виготовляють із високоякісних матеріалів і відповідним чином обробляють);необхідність силового замикання кулачкової пари, яке втілюється за допомогою пружин.
2..Основні типи плоских і просторових кулачкових механізмів
Розрізняють кулачкові механізми просторові й плоскі. У перших кулачок звичайно має форму циліндра з пазом, по якому переміщається ролик штовхача (рис.1).

Рис.1
У других ведуча ланка (кулачок) здійснює обертальний або поступальний рух (рис.2, а, б).

а) б) в)
Рис.2
Будемо розглядати тільки механізми з кулачком, що обертається, як такі, що мають найбільше розповсюдження.
Плоскі кулачкові механізми з кулачком, що обертається, поділяються на дві групи:
1).перша група перетворює обертальний рух кулачка в поступальний рух штовхача (рис.2, а);
2) друга група – обертальний рух кулачка в коливальний рух коромисла (рис.2, в).
Кожна із цих груп за формою елементу веденої ланки поділяється на три підгрупи, в яких кулачок працює:
а) по вістрю;
б) по ролику;
в) по площині.
Кулачкові механізми, які перетворюють обертальний рух у поступальний і працюють по вістрю або ролику, поділяються на:
а) центральні;
б) дезаксіальні.
Центральними називаються такі кулачкові механізми, в яких вісь штовхача проходить через центр обертання кулачка.
У дезаксіальних механізмах вісь штовхача зміщена відносно центра обертання кулачка на деяку величину е, яка називається дезаксіалом.
3. Основні параметри кулачка
Профілем кулачка називається крива, здобута в розрізі елементу кулачка площиною, перпендикулярною до його осі обертання.
Профілі кулачка бувають самі різноманітні. Розглянемо один із них, зображений на рис.3.

Рис.3
Мінімальний радіус кулачка (Rmin) – це радіус, що з’єднує центр обертання кулачка з найближчою точкою його профілю.
Максимальний радіус кулачка (Rmax) – це радіус, що з’єднує центр обертання кулачка з найвіддаленішою точкою його профілю.
Найбільше переміщення штовхача (h) – різниця довжини максимального і мінімального радіусів кулачка.
Неробочий кут (неробоча фаза) або кут б лижнього стояння (фаза ближнього стояння) (jо) – це центральний кут, що спирається на дугу ab мінімального радіуса. Під час ковзання по дузі мінімального радіуса штовхач залишається нерухомим і знаходиться в крайньому нижньому положенні.
Кут віддалення (фаза віддалення) (jв) – це центральний кут, що спирається на дугу bc, яка з’єднує крайні точки дуг мінімального і максимального радіусів кулачка. При ковзанні по дузі bc штовхач починає рухатись і віддаляється на максимальну відстань (переходить із нижнього у верхнє положення).
Кут дального стояння (фаза дальнього стояння) (jд.с.) – це центральний кут кулачка, що спирається на дугу сd максимального радіуса. Поки штовхач ковзає по дузі сd, він нерухомий і знаходиться на максимальній відстані від центра обертання кулачка О.
Кут повернення (фаза повернення) (jп) – це центральний кут кулачка, що спирається на дугу da, яка з’єднує крайні точки дуг максимального і мінімального радіусів кулачка. Під час ковзання по дузі da штовхач повертається із верхнього у вихідне (нижнє) положення.
Дата публикования: 2015-09-18; Прочитано: 1083 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
