 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Теорема про додавання прискорень 2 страница
|
|
Кінематичні пари на схемах позначаються літерами латинського алфавіту, а ланки, що їх утворюють, цифрами. Умовне зображення пар подано в таблиці 2.
Таблиця 2.
| Умовне зображення | Кінематичні пари | |
| Нижчі: | ||

| обертальна ланки можуть вільно переміщатись у площині лише в сукупності при будь-якому відносному положенні | |

| обертальна ланка 1 закріплена нерухомо, що обумовлює можливість обертального руху іншої ланки 2 в спільній площині | |

| поступальна обидві ланки вільно рухаються в площині при довільному відносному положенні | |
 
| поступальна ланка 1 закріплена нерухомо, що дозволяє ланці 2 здійснювати поступальний рух відносно неї | |
| Вищі: | ||

| ланки 1 і 2 вільно рухаються в площині при будь-якому відносному положенні | |

| ланка 2 закріплена нерухомо, а ланка 1 обертається навколо неї | |
4. Кінематичний ланцюг, різновиди кінематичних ланцюгів
Кінематичним ланцюгом називається зв’язана система ланок, які утворюють між собою кінематичні пари.
Кінематичні ланцюги поділяються на:
1) прості;
2) складні.
 Простим називається такий кінематичний ланцюг, кожна ланка якого входить не більше, ніж у дві кінематичні пари (рис.3).
Простим називається такий кінематичний ланцюг, кожна ланка якого входить не більше, ніж у дві кінематичні пари (рис.3).
Складним називається кінематичний ланцюг, в якому є хоча б одна ланка, що входить більше, ніж у дві кінематичні пари (рис.4).
Прості й складні кінематичні ланцюги в свою чергу поділяються на закриті й відкриті.

З акритим називається кінематичний ланцюг, кожна ланка якого входить принаймні в дві кінематичні пари (рис.5).
Відкритим називається кінематичний ланцюг, в якому є ланки, що входять тільки в одну кінематичну пару (рис.3, 4).
Тепер можемо дати ще одне означення механізму.
Механізмом називається такий кінематичний ланцюг, в якому при заданому русі однієї або декількох ланок решта здійснюють однозначно визначальні рухи.
Ланки, які рухаються за заданим законом, називаються ведучими. Решта рухомих ланок у механізмі – ведені.
Щоб вивчити рух механізму, недостатньо знати його структуру, тобто кількість ланок, кількість і класи кінематичних пар. Необхідно також знати розміри окремих ланок, які впливають на рух, взаємне їх положення тощо. Тому при вивченні руху ланок механізму складають його кінематичну схему, яка є його кінематичною моделлю.
Кінематична схема механізму будується в обраному масштабі з точним дотриманням всіх розмірів і форм, від яких залежить рух.
Питання для самоконтролю
1. Дати означення рухомій ланці, стояку, кінематичній парі, елементам ланок, кінематичному ланцюгу, умовам в’язі.
2. За якими ознаками класифікуються кінематичні пари?
3..Дати означення плоскій та просторовій, вищій та нижчій кінематичним парам.
4. Як визначається клас кінематичної пари?
5..Як умовно зображаються ланки та кінематичні пари на кінематичних схемах механізмів?
6..Що називається кінематичним ланцюгом? Які є їх різновиди?
7..Дати означення простому і складному, відкритому і закритому кінематичним ланцюгам.
8. Що називається механізмом, ведучою та веденими ланками?
Лекція № 17
Тема: “Ступінь рухомості кінематичного ланцюга. Основні різновиди механізмів”
План
1..Визначення ступеню рухомості кінематичного ланцюга загального вигляду та плоского механізму.
2. Поняття про пасивні в’язі та зайві ступені вільності.
3. Огляд основних різновидів механізмів.
1..Визначення ступеню рухомості кінематичного ланцюга загального вигляду та плоского механізму
Кількість ступенів вільності кінематичного ланцюга відносно ланки, обраної за нерухому, називається кількість ступенів рухомості або просто ступенем рухомості кінематичного ланцюга.
Ступінь рухомості кінематичного ланцюга загального вигляду (просторового механізму) визначається за формулою:
W=6n–5p5 – 4p4 – 3p3 – 2p2 – p1,
де n – кількість рухомих ланок кінематичного ланцюга; p5, p4, p3, p2, p1 – кількість кінематичних пар відповідно п’ятого, четвертого, третього, другого і першого класів.
Ця формула носить назву формули Сомова-Малишева (за прізвищами вчених, що її довели: в 1887р. – П.І. Сомов, у 1923р. – О.П. Малишев) або формули рухомості, структурної формули кінематичного ланцюга загального вигляду.
Для плоских механізмів структурна формула має вигляд:
W=(6–3)n–(5–3)p5–(4–3)p4–(3–3)p3,
оскільки в площині на рух всіх ланок накладено 3 спільні обмеження.
Таким чином, ступінь рухомості плоского механізму визначається за формулою:
W=3n–2p5 – p4.
Ця формула вперше була виведена П.Л.Чебишовим у 1869р. і тому носить назву формули Чебишова.
Ступінь рухомості механізму визначається кількістю ведучих ланок, закони руху яких задані.
Розглянемо приклад. Необхідно визначити ступінь рухомості механізму, зображеного на рис.1.
У цьому механізмі кількість рухомих ланок дорівнює 5 (n=5), а кількість кінематичних пар п’ятого класу дорівнює 7 (p5=7), пар четвертого класу немає, тоді:
W=3n–2p5–p4=3·5–2·7–0=1.

Рис.1
Отже, достатньо одній ланці задати рух, щоб рухи решти ланок були однозначно визначальними.
2. Поняття про пасивні в’язі та зайві ступені вільності
Слід відзначити, що крім тих в’язей, які активно впливають на характер руху ланок у механізмі, в них можуть зустрічатися такі ступені вільності й в’язі, які ніяк не впливають на характер руху механізму в цілому. Такі ступені вільності називаються зайвими, а в’язі – пасивними або надлишковими.
Нехай маємо механізм, зображений на рис.2.

Рис.2
Підрахуємо його ступінь рухомості. Оскільки n=4, p5=6, p4=0, то:
W=3n–2p5–p4=3·4–2·6=0.
Це, звичайно, неправильно. Рухомість цього кінематичного ланцюга дорівнює одиниці. Очевидно, отриманий результат (W=0) справедливий лише для системи з ланкою СD, яка не паралельна і не дорівнює двом іншим ланкам АВ і О1О2.
Таким чином проміжна ланка СD не накладає ніяких додаткових в’язей на дану систему. Тому такі в’язі і називаються пасивними. Їх поява в механізмі обумовлена найчастіше міркуваннями конструктивного характеру. Щоб уникнути помилок, їх необхідно виявляти і вилучати із розрахунків.
Виявити пасивні в’язі в механізмі можна найпростіше у процесі вивчення їх кінематики, наприклад, при визначенні переміщень і швидкостей ведених ланок. Якщо їх можна визначити без участі однієї або декількох ланок, то останні вносять пасивні в’язі в механізм.
4. Огляд основних різновидів механізмів
Шарнірно-важільним (важільним) називається механізм, ланки якого утворюють тільки обертальні й поступальні кінематичні пари (рис.3).
Ланка шарнірно-важільного механізму, яка може здійснювати повний оберт навколо нерухомої осі називається кривошипом (ланка 1).
Ланка шарнірно-важільного механізму, яка не утворює кінематичної пари зі стояком називається шатуном (ланка 4).
Ланка важільного механізму, яка утворює поступальну пару зі стояком, називається повзуном (ланка 5).

Рис.3
Ланка важільного механізму, яка обертається навколо нерухомої осі й утворює з іншою рухомою ланкою поступальну пару, називається кулісою (ланка 3).
Важільний механізм, до складу якого входить куліса, називається кулісним (рис.3).
Шарнірно-важільний механізм, ланки якого утворюють тільки обертальні пари, називають шарнірним механізмом (рис.4).

Рис.4
Ланка шарнірно-важільного механізму, яка може здійснювати тільки неповний оберт навколо нерухомої осі, називається коромислом (ланки 4, 5).
Шарнірний механізм, до складу якого входять три рухомі ланки, називається шарнірним чотириланковиком (рис.5).
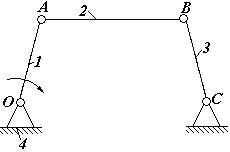
Рис.5
Шарнірно-важільний чотириланковий механізм, до складу якого входить кривошип і повзун, називають кривошипно-повзунковим або кривошипно-шатунним (рис.6).

Рис.6
 Кулачковим називають механізм, до складу якого входить кулачок, тобто така ланка, елемент якої має змінну кривизну (рис.7).
Кулачковим називають механізм, до складу якого входить кулачок, тобто така ланка, елемент якої має змінну кривизну (рис.7).
Ланка 1, яка утворює з кулачком кінематичну пару, називається штовхачем.
Зубчатим називається механізм, до складу якого входять зубчаті колеса.
Фрикційним називається механізм, в якому для передачі руху використовують силу тертя.
Розрізняють механізми з гнучкими ланками, які в залежності від вигляду гнучкої ланки називаються пасовою, ланцюговою або канатною передачами.
Комбінованим називається механізм, що складається з двох або більше механізмів різних видів (так, якщо в механізм входить кулачок і зубчате колесо, то він називається кулачково-зубчатим).
Всі перелічені вище механізми будуть розглядатися в процесі подальшого викладення матеріалу.
Питання для самоконтролю
1..Як визначається ступінь рухомості просторового кінематичного ланцюга, плоского механізму?
2..Які в’язі називаються пасивними? Чим обумовлена їх поява в механізмі? Як їх виявити?
3..Який механізм називається шарнірно-важільним (важільним), кулісним, шарнірним?
4..Дати означення кривошипу, шатуну, повзуну, кулісі, коромислу.
5..Які механізми відносяться до найпростіших важільних? Дати їм означення.
6..Дати означення кулачковим, фрикційним, зубчатим, комбінованим механізмам, а також механізмам з гнучкими ланками.
Лекція №18
Тема: “Групи Ассура. Основний принцип утворення механізмів”
План
1. Заміна вищих кінематичних пар у плоскому механізмі нижчими.
2. Групи Ассура та їх класифікація.
3. Основний принцип утворення механізмів.
4. Приклад структурного аналізу механізму.
1. Заміна вищих кінематичних пар у плоскому механізмі нижчими
У процесі вивчення структури і кінематики плоских механізмів часто зручно заміняти вищі кінематичні пари на нижчі. При цьому повинні виконуватись дві умови:
 Рис.1
Рис.1
|
1) щоб механізм, який дістали після заміни, мав такий же ступінь рухомості, як і до заміни;
2) щоб збереглись відносні рухи всіх ланок у цьому положенні.
Розглянемо механізм, зображений на рис.1.
Він складається з двох рухомих ланок 2 та 3, які входять в обертальні кінематичні пари п’ятого класу А та В зі стояком 1 і вищу кінематичну пару С четвертого класу, елементи ланок якої є колами радіусів.
За формулою Чебишова ступінь рухомості такого механізму дорівнює:
W=3n–2p5–p4=3·2–2·2–1=1.
Замінимо цей механізм еквівалентним йому АО2О3В. Вища пара заміняється ланкою 4, яка утворює в точках О2 і О3 обертальні пари п’ятого класу. Отриманий у результаті заміни механізм АО2О3В називають замінним механізмом.
Ступінь рухомості замінного механізму буде таким же, що і вихідного:
W=3n–2p5–p4=3·3–2·4–0=1.
2. Групи Ассура та їх класифікація
Групою Ассура називається кінематичний ланцюг, який після приєднання його до стояка має нульовий ступінь рухомості.
Якщо таку групу приєднати до рухомих ланок механізму, то ланки групи також набувають рухомості відносно одна одної, не змінюючи при цьому ступеню рухомості механізму в цілому. Із означення виходить:
W=3n–2p5=0.
Якщо в механізмі є вищі пари, то попередньо заміняємо їх на нижчі.
Звідси: 3n-2p5=0 або  .
.
Отже, групи Ассура можуть мати тільки парну кількість ланок, а кількість кінематичних пар повинна бути кратною 3, тобто:
n=2, p5=3; n=4, p5=6; n=6, p5=9; ….
Групи Ассура поділяються на класи, а кожен клас – на порядки.
За акад. І.І. Артоболевським, клас групи визначається кількістю кінематичних пар у замкнутому контурі, який входить до складу групи Ассура (рис.2).

II кл. III кл. IV кл.
Рис.2
Порядок визначається кількістю зовнішніх кінематичних пар або кількістю вільних елементів групи Ассура (рис.3).

II пор IІI пор IV пор.
Рис.3
Клас і порядок механізму в цілому визначається найвищим класом і найбільшим порядком групи найвищого класу.
3. Основний принцип утворення механізмів
Основний принцип утворення механізмів був вперше сформульований у 1914р. російським вченим Л.В.Ассуром. Ним запропонований метод утворення механізмів шляхом послідовного приєднання кінематичних ланцюгів, наділених певними структурними властивостями.
Цей метод легко можна прослідкувати на конкретному прикладі. Нехай маємо механізм, зображений на рис.4.
До складу цього механізму входить п’ять рухомих ланок, які утворюють сім кінематичних пар п’ятого класу. Тому за формулою Чебишова ступінь рухомості механізму дорівнює:
W=3n–2p5–p4=3·5–2·7–0=1.

Рис.4
Процес утворення цього механізму можна подати як послідовне приєднання до ведучої ланки 1 і стояка 2, які утворюють ведучу групу, групи Ассура АВD, що складається із ланок 2 та 3. Тоді дістанемо чотириланковий механізм ОАВD, який має один ступінь рухомості. Далі приєднаємо групу Ассура CEF, яка складається із ланок 4 та 5,і дістанемо шестиланковий механізм, що має також ступінь рухомості одиницю.
Тепер неважко встановити певну закономірність процесу утворення механізму.
Будь-який механізм має одну нерухому ланку (стояк). Механізм повинен мати кількість ведучих ланок, яка б відповідала кількості ступенів рухомості. У даному випадку одна ведуча ланка, оскільки ступінь рухомості механізму дорівнює 1.
Через те, що після приєднання ведених ланок 2, 3, 4 і 5 ступінь рухомості всього механізму залишається рівним 1, то кінематичний ланцюг, до складу якого входять ланки 2, 3, 4 і 5, приєднаний до ведучої групи, має нульовий ступінь рухомості відносно тих ланок, до яких він приєднаний.
Ведуча ланка зі стояком утворюють ведучу групу І класу.
Формула, що характеризує послідовність приєднання груп Ассура до ведучої групи, називається формулою будови механізму.
Для даного механізму вона має вигляд:
ІкІп ÞІІкІІп(2,3) ÞІІкІІп (4, 5).
Завершивши вивчення теми “Структура та класифікація механізмів і машин” зробимо висновок: структурний аналіз механізму включає в себе визначення кількості ланок, кількості й класу кінематичних пар, які утворюють цей механізм, обчислення ступеню рухомості, розділення його на групи Ассура, а також встановлення класу і порядку груп Ассура та механізму в цілому.
4. Приклад структурного аналізу механізму
1. Зображений на рис.5 механізм – плоский, шарнірно-важільний.
2. Масштаб побудови обчислюється за формулою:
 .
.

Рис.5
3. Таблиця кінематичних пар:
| Позначення пари | А | В | С | D | E | F | |
| Ланки, що її утворюють | 1,6 | 1,2 | 2,3 | 3,6 | 2,4 | 4,5 | 5,6 |
| Клас |
4. Ступінь рухомості механізму:
W=3n–2p5–p4=3·5–2·7–0=1.
Отже, цей механізм має одну ведучу ланку, тобто одній ланці слід задати рух, щоб решта виконувала однозначно визначальні рухи.
5. Розділення механізму на групи Ассура:
ведуча група г р у п и А с с у р а

6. У цілому механізм ІІ класу ІІ порядку.
7. Формула будови механізму:
ІкІп®ІІкІІп(2, 3)®ІІкІІп(4, 5).
Питання для самоконтролю
1. Які умови повинні виконуватися при заміні вищої пари нижчими?
2. Що називається групою Ассура? Скільки ланок та кінематичних пар утворюють групу Ассура?
3. Як класифікуються групи Ассура?
4. Сформулювати принцип утворення механізмів.
5. У чому полягає структурний аналіз механізмів?
Лекція № 19
Тема: “Кінематичний аналіз шарнірно-важільних механізмів. Побудова плану швидкостей”
План
1..Завдання та методи кінематичного дослідження механізмів.
2..Побудова положень і траєкторій окремих точок ланок механізму.
3..Кінематичний аналіз механізмів методом планів швидкостей і прискорень. Побудова плану швидкостей.
1..Завдання та методи кінематичного дослідження механізмів
Кінематичний аналіз механізмів полягає у вивченні рухів ланок механізмів за заданим рухом ведучих ланок без врахування сил, що діють на них.
Основні завдання:
1. Визначення положень ланок, включаючи і визначення траєкторій окремих точок ланок механізму.
2. Визначення швидкостей та прискорень точок та кутових швидкостей і прискорень ланок механізму.
Вихідними даними для кінематичного дослідження є закон руху ведучої ланки (ланок) і кінематична схема механізму.
Існують такі методи кінематичного аналізу:
1) графічно-аналітичний:
а) метод планів швидкостей і прискорень;
б) метод побудови кінематичних діаграм (графічного диференціювання);
2) аналітичний;
3) експериментальний.
2..Побудова положень і траєкторій окремих точок ланок механізму
Крива, по якій переміщається точка ланки під час роботи механізму, називається траєкторією цієї точки.
Існують такі методи побудови траєкторій:
а) засічок;
б) шаблонів;
в) моделей.
Розглянемо метод засічок на прикладі кривошипно–повзункового механізму (рис.1).

Рис.1
Перш ніж знаходити траєкторії окремих точок, необхідно побудувати механізм у масштабі. Вихідні дані:кінематична схема і розміри ланок.
Цей механізм ІІ класу ІІ порядку.
Положення ланок механізму креслимо в наступній послідовності. Спочатку наносяться всі нерухомі елементи (центри нерухомих шарнірів і осі напрямних поступальних пар), потім креслиться ведуча ланка, після чого перша група Ассура (причому спочатку визначаються положення зовнішніх точок, а потім – внутрішньої), потім друга, третя і всі інші групи. Якщо дві групи Ассура приєднані паралельно, то першою можна креслити будь-яку з них.
Побудуємо цю кінематичну схему в масштабі  .
.
Для цього у довільному місці помічаємо точку О, вправо від неї проводимо горизонтальну пряму – вісь напрямної поступальної пари (геометричне місце точок В). Таким чином, всі нерухомі елементи нанесені.
Потім креслимо кривошип. Він обертається і в різні моменти часу займає різні положення. Перше положення кривошипа обирають довільно. Відкладемо від точки О вертикально вгору довжину кривошипа ОА (в масштабі). Зовнішні пари вже нанесені: А – кінець кривошипа, С – нерухома точка, що лежить на осі х-х. Положення точки В знаходимо засічкою. Для цього розміром АВ із точки А, як із центра, на прямій х-х робимо засічку. З’єднавши відрізком прямої точки А і В, дістанемо перше положення групи Ассура. Щоб побудувати друге положення механізму, повернемо кривошип на 30°і знайдемо положення всіх зазначених вище точок.
Потім побудуємо траєкторію точки D. Для цього із точки А, як із центра, в кожному положенні механізму роблять засічки розміром АD і сполучають отримані точки плавною кривою.
3. Кінематичний аналіз механізму методом планів швидкостей і прискорень. Побудова плану швидкостей
Планом швидкостей (прискорень) ланки називається графічна побудова у вигляді плоского пучка, промені якого зображають абсолютні швидкості (прискорення) точок ланки плоского механізму, а відрізки, що сполучають кінці променів, – відносні швидкості (прискорення) відповідних точок у даному положенні ланки.
Планом швидкостей (прискорень) механізму називається сукупність планів швидкостей (прискорень) ланок механізму з одним спільним полюсом.
Розглянемо цей метод на прикладі групи Ассура ІІ класу (рис.2,а).
Вихідні дані: вектори швидкостей точок В і D кінцевих елементів групи (відкритих кінематичних пар) та кінематична схема групи. Необхідно визначити вектор швидкості  точки С.
точки С.
Рух точки С може бути розкладений на переносно-поступальний зі швидкістю точки В або точки D і відносно-обертальний відповідно відносно точки В або точки D.

а)

б)
Рис.2
Тоді векторні рівняння для точки С будуть мати вигляд:

 ; (1)
; (1)
 . (2)
. (2)
Прирівняємо праві частини рівнянь:

 . (3)
. (3)
У рівнянні (3) відомі за величиною і напрямком вектори швидкостей  і
і  . Вектори ж швидкостей
. Вектори ж швидкостей  і
і  відомі тільки за напрямком: вектор обертальної швидкості точки С відносно точки В напрямлений перпендикулярно до ланки ВС, а вектор швидкості точки С відносно точки D напрямлений перпендикулярно до сторони СD ланки 3.
відомі тільки за напрямком: вектор обертальної швидкості точки С відносно точки В напрямлений перпендикулярно до ланки ВС, а вектор швидкості точки С відносно точки D напрямлений перпендикулярно до сторони СD ланки 3.
Таким чином, у рівнянні (3) невідомі тільки величини векторів швидкостей  і
і  , які можуть бути визначені побудовою плану швидкостей (рис.2,б).
, які можуть бути визначені побудовою плану швидкостей (рис.2,б).
Дата публикования: 2015-09-18; Прочитано: 1737 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
