 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Метод жорсткого важеля Жуковського
|
|
1. Силовий аналіз шарнірного чотириланковика планів сил

Визначити реакції в кінематичних парах і зрівноважуючий (ведучий) момент від дії сил:  ,
,  ,
,  шарнірного чотириланковика, зображеного на рис.1 у масштабі
шарнірного чотириланковика, зображеного на рис.1 у масштабі  .
.
Цей механізм ІІ класу ІІ порядку складається з ведучої групи ОА та однієї групи Ассура АВС.
У зазначеному масштабі накреслимо групу Ассура і нанесемо всі сили, що діють на неї (рис.2,а). Оскільки напрямок реакцій у зовнішніх парах невідомий, розкладаємо їх на нормальну та дотичну (тангенціальну) складові:  ,
,  та
та  ,
,  .
.
|

 .
.
|

Тут невідомими є
 .
.
Для визначення дотичних складових складемо рівняння моментів відносно точки В всіх сил, що діють на 2 і 3 ланки окремо:
 ,
,
звідки:
 .
.
 ,
,
звідки:
 .
.
Отже,  напрямлена в бік, протилежний тому, що показано на кінематичній схемі. На кінематичній схемі групи Ассура закреслимо її і змінимо напрямок (див. рис.2,а).
напрямлена в бік, протилежний тому, що показано на кінематичній схемі. На кінематичній схемі групи Ассура закреслимо її і змінимо напрямок (див. рис.2,а).
Для визначення нормальних реакцій будуємо план сил за рівнянням рівноваги групи Ассура (рис.2,б)
Повні реакції у відкритих кінематичних парах визначаємо геометричною сумою їх нормальної і дотичної складових:
 ;
;
 .
.
Визначимо реакцію в точці В. Для цього складемо рівняння рівноваги третьої ланки (де менше діє сил), маємо:
 .
.
За цим рівнянням будуємо план сил (рис.2,в). Як замикальний вектор силового трикутника визначаємо  .
.
 .
.
Визначимо дійсні значення реакцій:
 ;
;
 ;
;
 .
.
Розглянемо ведучу групу ОА. До неї прикладені сили:  ,
,  та
та  (рис.3,а).
(рис.3,а).

а) б)
Рис.3
Складемо рівняння рівноваги ведучої групи:
 .
.
Вектор  відомий за величиною та напрямком, величини
відомий за величиною та напрямком, величини  та
та  визначає точка перетину їх напрямків (рис.3,б).
визначає точка перетину їх напрямків (рис.3,б).
Дійсні значення сил:
 ;
;
 .
.
Отже, зрівноважуючий момент:
 .
.
2. Метод жорсткого важеля Жуковського
Як ми відзначали вище, метод жорсткого важеля Жуковського застосовується в тому випадку, коли необхідно визначити тільки зрівноважуючу силу і не треба визначати реакцій у кінематичних парах.
Теорема Жуковського. Якщо який-небудь механізм під дією системи сил, прикладених до нього, перебуває у рівновазі, то повернутий на 900 в будь-який бік план швидкостей механізму, який розглядається як жорсткий важіль, що обертається навколо полюса плану і навантажений тими ж силами, прикладеними у відповідних точках плану, теж перебуває у рівновазі.
Цей метод застосовується і для системи, яка не перебуває у рівновазі, досить, крім діючих сил, прикласти сили інерції ланок. Отримана система сил умовно перебуває у рівновазі, тому теорему до неї можна застосувати.
Доведення. В основу доведення покладений принцип можливих переміщень. Жуковський дав графічну інтерпретацію принципу можливих переміщень: робота зведеної сили на її елементарному переміщенні дорівнює сумі робіт реальних сил, що діють у механізмі, на їх елементарних переміщеннях.
Нехай маємо плоский механізм, до ланок якого прикладені відомі сили. Позначимо сили по точках їх прикладання, тобто сила  прикладена в точці В і т. д.
прикладена в точці В і т. д.
Зведена сила  прикладена в точці А (кінці кривошипа) перпендикулярно до нього.
прикладена в точці А (кінці кривошипа) перпендикулярно до нього.
Як відомо з динаміки матеріальної точки та системи, робота сили обчислюється як добуток сили на елементарне переміщення і косинус кута між напрямами сили і швидкості:
 (1)
(1)
У визначення роботи зведеної сили косинус не ввійшов, оскільки напрямок зведеної сили збігається з напрямком швидкості  точки А.
точки А.
Розділивши рівняння (1) на dt дістанемо:
 (2)
(2)
 Нехай для механізму, на який діють зазначені сили, побудований план швидкостей, на якому є відрізок pb, який зображає швидкість
Нехай для механізму, на який діють зазначені сили, побудований план швидкостей, на якому є відрізок pb, який зображає швидкість  точки В (рис.4). Перенесемо з механізму на план швидкостей у точку b силу
точки В (рис.4). Перенесемо з механізму на план швидкостей у точку b силу  . Позначимо кут
. Позначимо кут  між напрямками сили і швидкості через β. Тоді:
між напрямками сили і швидкості через β. Тоді:
 ,
,
де bk – проекція швидкості на напрямок сили ,  .
.
Якщо силу повернути на кут 90○ (у будь-який бік), то проекція швидкості bk стане плечем моменту повернутої сили  відносно полюса р плану швидкостей.
відносно полюса р плану швидкостей.
Отже, сума в рівнянні (2) є сумою моментів відносно полюса плану швидкостей всіх сил, перенесених із механізму на план швидкостей і повернутих на кут 90○.
Якщо в рівнянні (2) добуток  перенесемо в праву частину, то він змінить знак на протилежний, тобто зведена сила стане зрівноважуючою, а сума всіх моментів буде дорівнювати 0:
перенесемо в праву частину, то він змінить знак на протилежний, тобто зведена сила стане зрівноважуючою, а сума всіх моментів буде дорівнювати 0:
 .
.
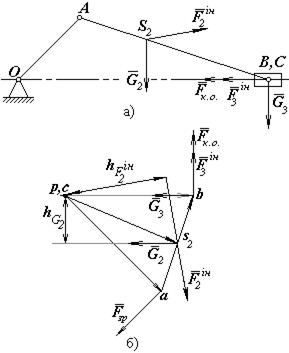
Рис.5
Послідовність визначення зведеної сили методом Жуковського:
1. Будується план швидкостей механізму в масштабі  .
.
2. У відповідних точках плану швидкостей прикладаються повернуті на 90○ сили, що діють на ланки механізму (включаючи і зрівноважуючу).
3. Складається сума моментів всіх сил відносно полюса плану швидкостей і визначається зрівноважуюча сила.
Розглянемо, як приклад, кривошипно-повзунковий механізм, навантажений у відповідних точках силами:  , ,
, ,  , ,
, ,  . Необхідно визначити зрівноважуючу силу (рис.5, а).
. Необхідно визначити зрівноважуючу силу (рис.5, а).
Для цього побудуємо в масштабі план швидкостей механізму (рис.5, б) та прикладемо у точках а, s2 та в відповідно сили , , та , , , повернуті на кут 90○ за ходом годинникової стрілки.
Складемо рівняння моментів всіх прикладених до плану швидкостей сил відносно полюса плану:
 ;
;
Звідси визначимо шукану зрівноважуючу силу (плечі сил заміряємо безпосередньо на кресленні плану швидкостей):
 .
.
Питання для самоконтролю
1. В якій послідовності ведеться кінематичний аналіз шарнірного чотириланковика?
2. Теорема Жуковського. Доведення.
3. Послідовність визначення зрівноважуючої сили методом Жуковського.
4. Розв’язати задачу силового дослідження шарнірного чотириланковика, застосовуючи метод планів та метод Жуковського.
Лекція №37
Тема: “Тертя в кінематичних парах”
План
1. Різновиди та основний закон тертя.
2. Тертя на горизонтальній площині.
3. Тертя на похилій площині.
4. Визначення моменту тертя в обертальній кінематичній парі.
Дата публикования: 2015-09-18; Прочитано: 2461 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
