 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Тема 1. 5. Типовые динамические звенья систем автоматики
|
|
Любое автоматическое устройство можно представить в виде простейших составных частей - звеньев, которые обладают динамическими свойствами этого автоматического устройства. Зависимость выходной величины звена от входной (при переходном процессе) определяет динамическая характеристика звена. Конструктивное исполнение, принцип действия и схемы звеньев, входящих в системы автоматического регулирования, могут быть различными. Однако их можно свести к нескольким так называемым типовым звеньям, если в основу классификации положить зависимость входных и выходных величин звена от времени. Эту зависимость называют еще динамической характеристикой. Динамические характеристики звеньев описываются дифференциальными уравнениями.
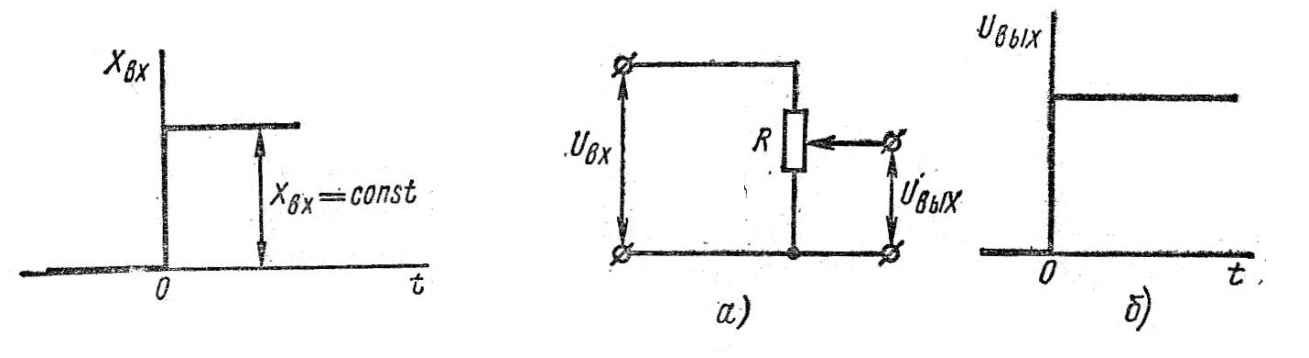
При определении динамических свойств в качестве типовой входной величины принимают скачкообразную функцию (рис. 1.31).При подаче на вход звена величины в виде мгновенного скачка выходная величина во время переходного процесса изменяется по определенному закону.
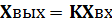
| Рис.1.31. Типовая скачкообразная функция при воздействии на звенья | Рис.1.32. Схема безинерционного звена (а) и его его временная диаграмма (б). |
В зависимости от характера протекания переходного процесса различают следующие типовые звенья систем автоматического регулирования: безынерционные, апериодические, дифференцирующие, интегрирующие и колебательные.
Безынерционным называют звено, в котором выходная величина Хвых пропорциональна входной Хвх:
 (1.2)
(1.2)
где К -коэффициент усиления или передаточное число звена.
Это звено называют также идеальным, усилительным, пропорциональным или безъемкостным. Примерами безъемкостного звена являются делитель напряжения, электронный усилитель, редуктор, рычаг, трансформатор и т. п. При подаче на вход звена скачкообразного сигнала на его выходе сигнал появляется без запаздывания. Поэтому такие звенья и называют безынерционными. Схема безынерционного звена и зависимость его выходной величины от времени показаны на рис.1.32.
Апериодическим называют звено, в котором при скачкообразном изменении -входной величины его выходная величина запаздывает относительно входной и изменяется по экспоненциальному закону с постоянной времени Т. Это звено называют инерционным, статическим, одноемкостным, релаксационным. Примерами апериодического звена служат контуры, состоящие из резистора и конденсатора или из катушки индуктивности и резистора; электродвигатели постоянного тока с независимым возбуждением; двухфазные асинхронные двигатели. Для апериодического звена, схема которого состоит из резистора и конденсатора (рис. 1.33, а), справедливо следующее уравнение:
 (1.3)
(1.3)
где: р- оператор или сокращенная запись операции дифференцирования;
T=RC- постоянная времени.
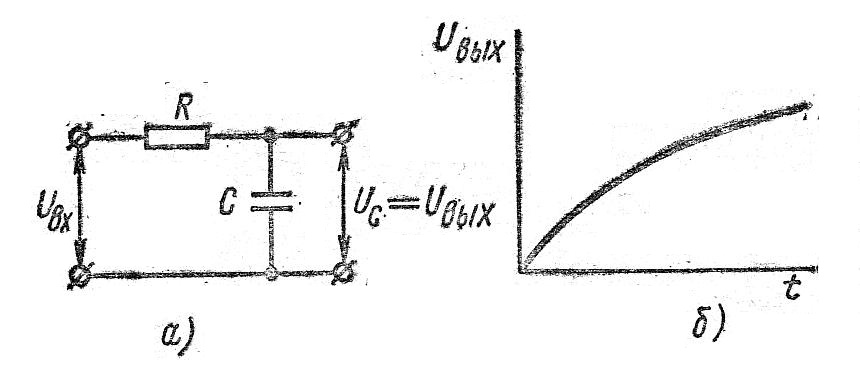
Рис. 1.33. Схема апериодического звена (a) и его временная диаграмма (б)
Решением этого дифференциального уравнения является выражение:
 (1.4)
(1.4)
На рис. 1.33,б построена зависимость (1.4) от времени, при подаче на вход ступенчатого сигнала.
Дифференцирующим называется звено в котором выходная величина изменяется пропорционально скорости изменения входной величины. Примеры таких цепей- индуктивности и активное сопротивление, емкость и активное сопротивление. На рис.1.34а изображено дифференцирующее звено из конденсатора и резистора.
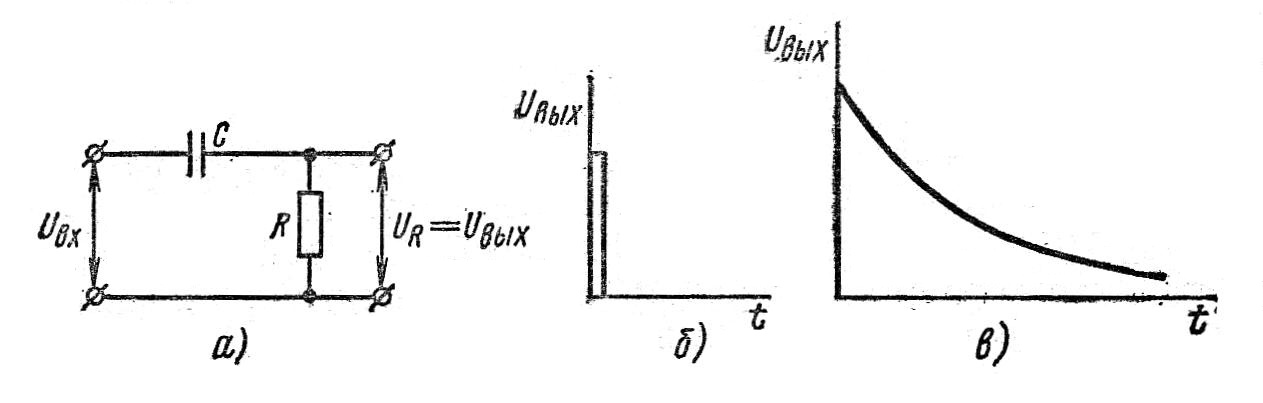
Рис. 1.34. Схема (а) и временные диаграммы дифференцирующего звена: (б) – идеального (в)- реального звена
Для идеального дифференцирующего звена дифференциальное уравнение имеет вид:
 (1.5)
(1.5)
Временная характеристика идеального дифференцирующего звена приведена на рис. 1.34, б.
С учетом постоянной времени Т для реального дифференцирующего звена дифференциальное уравнение в операторной форме имеет вид:
 (1.6)
(1.6)
Решив это уравнение, получим уравнение динамической характеристики реального дифференцирующего звена:
 (1.7)
(1.7)
Эта характеристика имеет вид убывающей экспоненты (рис. 1.34, в).
Интегрирующим называют звено, в котором выходная величина пропорциональна интегралу по времени от входной величины. Это звено называют астатическим, а также нейтральным. Интегрирующими звеньями считают электродвигатель (выходной величиной является угол поворота вала), конденсатор, дроссель с нулевым активным сопротивлением. На рис. 1.35,а приведена схема интегрирующего звена- электродвигателя постоянного тока с независимым возбуждением. При постоянном напряжение на входе двигателя частота вращения вала двигателя является постоянной величиной. Угол поворота вала φ будет линейно зависеть от времени (рис. 1.35,б)
 (1.8)
(1.8)
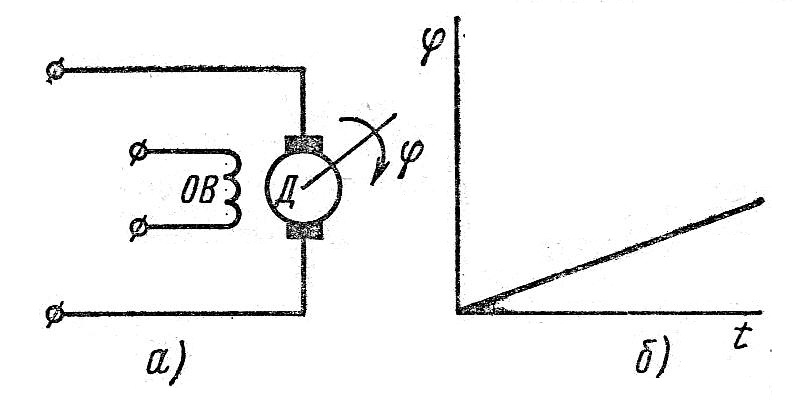
Рис. 1.35. Схема интегрирующего звена (a) и его временная диаграмма (б)
Колебательным называют звено, в котором при скачкообразном изменении входной величины величина на выходе стремится к своему новому установившемуся значению, совершая затухающие колебания. Примерами колебательных звеньев служат электрические колебательные контуры, состоящие из активного резистора, катушки индуктивности и конденсатора; механические колебательные устройства, обладающие массой, упругостью и вязким трением (демпфированием).
На рис. 1.36, а приведена схема электрического колебательного звена.
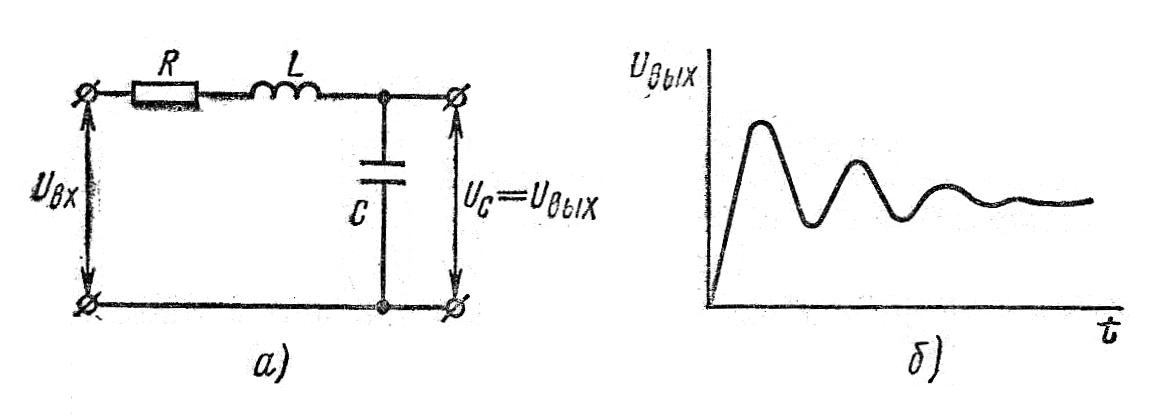
Рис. 1.36. Схема колебательного звена (a) и его временная диаграмма (б)
Для этого звена операторное уравнение:
 (1.8)
(1.8)
где:  - постоянная времени,
- постоянная времени,  -коэффициент затухания
-коэффициент затухания
Решение это дифференциального уравнения второго порядка (так как  ), графические представлено на рис.1.36,б (при ступенчатом входном воздействии).
), графические представлено на рис.1.36,б (при ступенчатом входном воздействии).
Для анализа свойств звеньев систем автоматического регулирования вводят понятия о передаточных функциях и частотных характеристиках. Передаточной функцией называют отношение мгновенных значений выходной величины к входной. Передаточные функции записываются обычно в операторной форме:
K  (1.9)
(1.9)
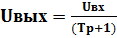
Передаточные функции рассмотренных выше типовых звеньев систем автоматического регулирования имею вид:
безинерционное звено
 (1.10)
(1.10)
апериодическое звено
 (1.11)
(1.11)
идеальное дифференцирующее звено
 (1.12)
(1.12)
реальное дифференцирующее звено
 (1.13)
(1.13)
интегрирующее звено
 (1.14)
(1.14)
колебательное звено
 (1.15)
(1.15)
Передаточные функции записываются для одного звена, для соединения звеньев, а также для системы в целом.
Дата публикования: 2015-09-17; Прочитано: 3323 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
