 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Теоретичні відомості. Кулачковим називається механізм, до складу якого входить кулачок, тобто така ланка, елемент якої має змінну кривизну
|
|
Кулачковим називається механізм, до складу якого входить кулачок, тобто така ланка, елемент якої має змінну кривизну.
Кулачкові механізми застосовують у тих випадках, коли у процесі безперервного руху ведучої ланки (кулачка) необхідно за заданим законом змінювати рух веденої ланки і особливо тоді, коли остання під час руху решти ланок повинна тимчасово зупинятися. Такий характер руху має місце в металорізальних верстатах-автоматах, у пресах, деяких типах ножиць, у розподільних механізмах парових машин з клапанним паророзподілом, у двигунах внутрішнього згорання тощо.
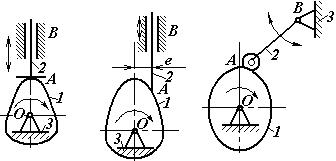
Кулачкові механізми бувають просторові та плоскі. Найбільш поширеними серед них є плоскі кулачкові механізми з кулачком, що обертається навколо осі. Вони розподіляються на дві групи.
Перша група цих механізмів застосовується для перетворення обертального руху кулачка в поступальний рух штовхача, друга група – для перетворення обертального руху кулачка в коливальний рух коромисла (рис.2.1). Кожну з цих груп за формою елементу веденої ланки поділяють ще на три підгрупи, в яких кулачок працює: по вістрю (рис.2.1,б), ролику (рис.2.1,в) чи площині (рис.2.1,а).
Кулачкові механізми називають центральними, якщо вісь штовхача проходить через центр обертання кулачка (рис.2.1,а). Якщо ж вісь штовхача зміщена відносно осі обертання кулачка на деяку величину е (дезаксіал), то такі кулачкові механізми називаються десаксіальними (рис.2.1,б).
а) б) в)
Рис.2.1. Кулачкові механізми: а, б) з поступальним рухом штовхача;
в) з коливальним рухом коромисла
Основними параметрами кулачка (рис.2.2) є: профіль кулачка; мінімальний (Rmin) та максимальний (Rmax) радіуси; найбільше переміщення штовхача (h); кути: віддалення (φв), дальнього стояння (φд.с), повернення (φn), ближнього стояння або неробочий (φo), робочий (φp); радіус профілю кулачка ( ,
,  ).
).
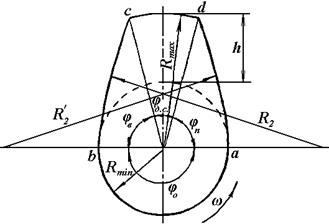
Рис.2.2. Основні параметри кулачка
Профілем кулачка називають криву, здобуту в розрізі елементу кулачка площиною, перпендикулярною до його осі обертання.
Мінімальний радіус кулачка (Rmin) - це радіус, що з'єднує центр обертання кулачка з найближчою точкою його профілю.
Максимальний радіус кулачка (Rmax) - це радіус, що з'єднує центр обертання кулачка з найвіддаленішою точкою його профілю.
Найбільше переміщення штовхача (h) - це різниця довжин максимального і мінімального радіусів кулачка.
Кут віддалення (фаза віддалення) (φв)- це центральний кут, що спирається на дугу bc, яка з'єднує крайні точки дуг мінімального і максимального радіусів кулачка. Під час ковзання по дузі bc штовхач переходить із крайнього нижнього в крайнє верхнє положення.
Кут дальнього стояння (фаза дальнього стояння) (φд . с ) - це центральний кут кулачка, що спирається на дугу cd максимального радіуса. Під час ковзання по дузі cd штовхач залишається нерухомим і знаходиться на максимальній відстані від центра обертання О.
Кут повернення (фаза повернення) (φn) - це центральний кут кулачка, що спирається на дугу da, яка з'єднує крайні точки дуг максимального і мінімального радіусів кулачка. Під час ковзання по дузі dа штовхач переходить із крайнього верхнього в крайнє нижнє положення.
Робочий кут (робоча фаза) (φp)- це центральний кут кулачка, який дорівнює сумі кутів віддалення, дальнього стояння і повернення:
φp=φв+φд.с+φn.
Неробочий кут (неробоча фаза) або кут ближнього стояння (фаза ближнього стояння) (φo) - це центральний кут, що спирається на дугу ab мінімального радіуса. Під час ковзання по дузі ab штовхач залишається нерухомим і знаходиться в крайньому нижньому положенні. Сума всіх кутів дорівнює 360°:
φp+φo= φв +φд.с+φn+φo=3600.
Радіус профілю кулачка (R2, R´2) - це радіус дуги, яка відповідає фазі віддалення або повернення. Якщо крива, що відповідає фазі віддалення (повернення), не є дугою кола, то радіус профілю кулачка буде змінним.
У завдання кінематичного дослідження кулачкового механізму входить з'ясування закону руху веденої ланки за заданими розмірами механізму і законом руху кулачка Припустимо, що кулачок обертається рівномірно, тобто ω=const.
Кінематичне дослідження кулачкового механізму починають із побудови діаграми s=s(φ) за заданим профілем кулачка. Для цього повертають кулачок на 30° і помічають переміщення штовхача для кожного положення кулачка. Результати замірів заносять до таблиці:
Таблиця 2.1
Кінематичні параметри штовхача в дванадцяти положеннях кулачка
| № п/п параметр | ||||
| s, м | ||||
| v, м/с | ||||
| а, м/с2 |
Кінематичною діаграмою називають графічне зображення функціональної залежності між якими-небудь кінематичними параметрами.
Щоб побудувати діаграму s=s(φ) або s=s(t), відкладають у кожному положенні кулачка переміщення штовхача в масштабі:
 ,
,
де smax - найбільше переміщення штовхача, м; h - довільний відрізок, що зображає smax на діаграмі, мм.
Залежності v=v(φ) або v=v(t) і a=a(φ) або a=a(t) можна дістати шляхом одноразового та дворазового графічного диференціювання залежності s=s(φ) або s=s(t).
Існують два методи графічного диференціювання:
1) метод дотичних;
2) метод хорд.
Але враховуючи те, що дотичну до кривої провести дуже важко, навіть при наявності відповідного обладнання, на практиці ширше використовується метод хорд.
Графічне диференціювання методом хорд виконується в такій послідовності (рис.2.3):
1. Точки 0, 1´, 2´, 3´... діаграми s=s(φ) з'єднують хордами.
2. Внизу під діаграмою s=s(φ) будують нову систему координат.
3. На осі абцис відкладають вліво від точки O1 довільний відрізок O1P1, який називається полюсною відстанню (H1).

Рис. 2.3. Кінематичні діаграми
4. Через полюс Р1 проводять промені P11', P12', … паралельно хордам O1 - 1', 1' - 2', … Проходячи під кутом α1, α2, …, промені відтинають на осі ординат відрізки, що задовольняють співвідношення:
 ,
,
звідки видно, що відрізок O1 - 1', як і інші, зображає середню швидкість руху штовхача в масштабі  .
.
5. Відрізки O1 - 1', O1 - 2',… переносять на середини відповідних інтервалів і сполучають здобуті точки 1'', 2'', 3'',… плавною кривою.
Побудована таким чином крива v=v(φ) буде диференціальною по відношенню до вихідної s=s(φ).
Продиференціювавши графічно криву v=v(φ), отримаємо діаграму залежності a=a(φ). Методика її побудови нічим не відрізняється від попередньої. Масштаб побудови визначається за формулою:
 або
або  .
.
Обчисливши дійсні значення швидкості та прискорення для кожного положення механізму, заносять їх до таблиці 2.1.
Дата публикования: 2015-09-17; Прочитано: 789 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
