 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Теоретичні відомості. Механізмом називається система твердих тіл, призначена для перетворення руху одного або декількох тіл у необхідні рухи інших
|
|
Механізмом називається система твердих тіл, призначена для перетворення руху одного або декількох тіл у необхідні рухи інших.
Будь-який механізм складається із окремих тіл (деталей). Кожна рухома деталь чи група деталей, які утворюють одну жорстку рухому систему тіл, називається рухомою ланкою механізму. Всі нерухомі деталі утворюють одну жорстку нерухому систему тіл, яка називається нерухомою ланкою або стояком. Таким чином, у будь-якому механізмі є одна нерухома і одна або декілька рухомих ланок.
З’єднання двох ланок, яке допускає їх відносний рух, називається кінематичною парою.
Поверхні, лінії або точки ланок, по яких вони можуть з’єднуватись з іншими ланками, утворюючи кінематичну пару, називаються елементами ланок.
Зв’язана система ланок, які утворюють між собою кінематичні пари, називається кінематичним ланцюгом.
Обмеження, накладені на відносний рух ланки, називаються умовами в’язі в кінематичних парах.
Класифікація кінематичних пар
Всі кінематичні пари класифікуються за трьома ознаками.
1. За характером відносного руху ланок кінематичні пари поділяються на:
а) плоскі;
б) просторові.
Плоскими кінематичними парами називаються такі, в яких точки ланок, що входять у пару, описують траєкторії, які лежать у паралельних площинах.
Просторовими кінематичними парами називаються такі, в яких точки ланок, що входять у пару, описують неплоскі траєкторії.
2. За формою елементів ланок кінематичні пари бувають:
а) вищими;
б) нижчими.
Вищою називається така пара, дотикання ланок якої відбувається по лінії або в точці. До таких пар належать зубчата, кулачкова.
Нижчою називається така пара, дотикання ланок якої відбувається по поверхні. До таких пар належать обертальна (шарнір), поступальна.
3. За кількість ступенів вільності у просторовому русі кінематичні пари поділяються на 5 класів. Причому клас пари визначається за кількістю умов в’язі, накладених на відносний рух ланок. Так, до першого класу належать пари, що накладають лише одну умову в’язі на відносний рух ланок, до другого – дві умови в’язі і т.д.
Ступінь рухомості плоского механізму
Кількість ступенів вільності кінематичного ланцюга відносно ланки, обраної за нерухому, називається кількістю ступенів рухомості або просто – ступенем рухомості кінематичного ланцюга.
Ступінь рухомості плоского механізму визначається за формулою Чебишева:
W=3n–2p5–p4,
де n – кількість рухомих ланок; p5 – кількість кінематичних пар п’ятого класу; p4 – кількість кінематичних пар четвертого класу.
Приклад. Визначити ступінь рухомості шарнірно-важільного механізму, зображеного на рис. 1.1.
Кількість рухомих ланок цього механізму дорівнює 7, а кількість пар 5 класу дорівнює 10 (О, А, В,С, D, Е, F, G, K, L), пар четвертого класу в ньому немає. Тоді за формулою Чебишева маємо:
W=3n–2p5–p4=3∙7–2∙10=1.
Отже, одній ланці достатньо надати рух, щоб рух решти був цілком визначеним, іншими словами, цей механізм має одну ведучу ланку.
Групи Ассура та їх класифікація
Групою Ассура називається кінематичний ланцюг, який після його приєднання вільними елементами до стояка має нульовий ступінь рухомості, тобто
W=3n–2p5–p4=0.
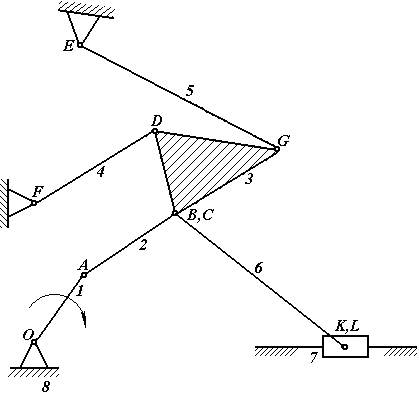
Рис. 1.1. Кінематична схема шарнірно-важільного механізму
Оскільки у групу Ассура входять тільки кінематичні пари п’ятого класу, то  . Це і є структурна формула групи Ассура.
. Це і є структурна формула групи Ассура.
Клас груп Ассура визначається кількістю кінематичних пар у замкнутому контурі, який входить до її складу. Порядок груп Ассура визначається кількістю вільних елементів або відкритих кінематичних пар. Клас і порядок механізму в цілому визначається найвищим класом і найбільшим порядком групи Ассура.
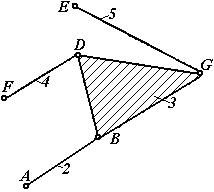
Для того, щоб розділити механізм (рис.1.1) на групи Ассура, необхідно перш за все виділити ведучу групу, яка складається із стояка і кривошипу, а потім вже визначитись із кількістю груп Ассура та їх класом і порядком (рис.1.2).
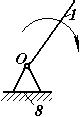

ведуча група група Ассура
І класу І порядку ІІ класу ІІ порядку
група Ассура
ІІІ класу ІІІ порядку
Рис. 1.2. Кінематичні схеми структурних груп
Шарнірно-важільний механізм, зображений на рис.1.1, у цілому III класу III порядку.
Формула, яка показує послідовність приєднання груп Ассура до ведучої групи, називається формулою будови механізму. Для механізму, зображеного на рис. 1.1, формула будови має вигляд:
Дата публикования: 2015-09-17; Прочитано: 1030 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
