 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Примеры решения задач. Задача 8.3.1. Колесо радиуса r = 1 м катится без скольжения ускоренно по прямолинейному рельсу, имея в данный момент времени скорость центра vo =1 м/с и
|
|
Задача 8.3.1. Колесо радиуса r = 1 м катится без скольжения ускоренно по прямолинейному рельсу, имея в данный момент времени скорость центра vo = 1 м/с и ускорение центра a о— 1 м / с 2 (рис. 8.5). Определить угловую скорость и угловое ускорение колеса, скорости и ускорения точек его обода М1, М2, М3 и М4, а также установить положение МЦС и МЦУ колеса.

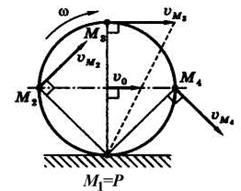
Рис.8.5 Рис. 8.6
Решение.
I. Определение скоростей. У колеса, катящегося без скольжения по неподвижной поверхности, МЦС (точка Р) находится в точке касания с этой поверхностью (рис. 8.6). В данном случае это точка M 1 (М 1 = Р):  .
.
Скорости точек плоской фигуры пропорциональны расстояниям от этих точек до МЦС:  , где ω — угловая скорость тела. Применяем эту формулу к точке О: v o = ω | ОР | = ωr, откуда ω = v o/ r = 1 с– 1.
, где ω — угловая скорость тела. Применяем эту формулу к точке О: v o = ω | ОР | = ωr, откуда ω = v o/ r = 1 с– 1.
Для точек М 2 и М 3 расстояния до точки Р одинаковы, поэтому одинаковы и модули скоростей этих точек:
 м/с.
м/с.
Скорость точки М 3  м/с. Направления скоростей перпендикулярны отрезкам, соединяющим точки с МЦС.
м/с. Направления скоростей перпендикулярны отрезкам, соединяющим точки с МЦС.
Для вычисления скоростей можно было использовать также и теорему о сложении скоростей, выбрав в качестве полюса центр колеса:  , где vMO = ω | МО |. Скорость
, где vMO = ω | МО |. Скорость  перпендикулярна отрезку МО и направлена по ходу вращения.
перпендикулярна отрезку МО и направлена по ходу вращения.
Можно было также пользоваться и следствием из этой теоремы о равенстве проекций скоростей точек на ось, проходящую через эти точки.
2. Определение ускорений. Вычислим сначала угловое ускорение колеса, формально дифференцируя выражение угловой скорости
 .
.
В данном случае использован тот факт, что движение центра колеса прямолинейное и, следовательно, касательное ускорение точки  совпадает с полным ускорением.
совпадает с полным ускорением.
Для вычисления ускорений точек колеса применим теорему о сложении ускорений:  , выбрав в качестве полюса центр колеса. Вращательное ускорение точки относительно полюса
, выбрав в качестве полюса центр колеса. Вращательное ускорение точки относительно полюса  и направлено перпендикулярно отрезку МО по ходу углового ускорения а центростремительное
и направлено перпендикулярно отрезку МО по ходу углового ускорения а центростремительное  всегда направлено от точки к полюсу.
всегда направлено от точки к полюсу.
Тогда для точек М 1, М 2, М 3 и М 4 получим  ,
,  . Направления их показаны на рис. 8.7.
. Направления их показаны на рис. 8.7.

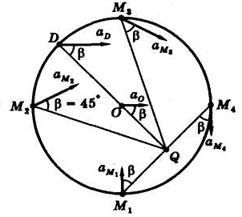
Рис. 8.7 Рис. 8.8
Складывая в каждой точке три вектора, модули которых равны по 1 м / с 2, получаем  м / с 2,
м / с 2,  м / с 2.
м / с 2.
3. Определение положения МЦУ. Найти положение МЦУ (точки Q, ускорение которой равно нулю) можно на основании известных положений:
а) все ускорения составляют один и тот же угол β с направлениями из этих точек на МЦУ:
 .
.
В данном случае tg β = 1 и β = 45°. Повернув каждое ускорение на угол β по ходу углового ускорения, мы на пересечении лучей и получим точку Q (рис. 8.8). Итак, МЦУ колеса при принятых исходных данных оказывается на середине отрезка М 1 M 4;
б) ускорения точек пропорциональны расстояниям от этих точек до МЦУ:
 .
.
В силу одинаковости расстояний до МЦУ в данном случае оказываются равны между собой модули ускорений  , а также
, а также  . Из всех точек колеса самое большое ускорение будет иметь точка D (рис.8.8):
. Из всех точек колеса самое большое ускорение будет иметь точка D (рис.8.8):
 .
.
Задача 8.3.2. Кривошип OA длиной 0,2 м вращается равномерно с угловой скоростью ωOA = 10 с–1 и приводит в движение шатун АВ длиной 1 м. Ползун В движется по вертикали. Найти угловую скорость и угловое ускорение шатуна, а также скорость и ускорение ползуна в момент, когда кривошип и шатун взаимно перпендикулярны и образуют с вертикалью угол 45° (рис. 8.9).
Решение.
1. Определение скоростей. Вычислим скорость точки А как точки вращающегося кривошипа:
 .
.
Она направлена перпендикулярно ОА (рис. 8.10).
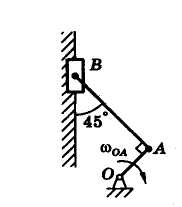

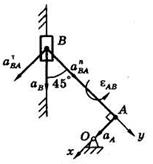
Рис. 8.9 Рис. 8.10 Рис. 8.11
Скорость vB ползуна направлена по направляющей вертикально.
Для шатуна АВ, совершающего плоское движение, теперь известны направления скоростей двух его точек: А и В. Восставляя перпендикуляры к векторам этих скоростей, находим точку Р их пересечения — МЦС шатуна.
Используя известную формулу для скоростей точек при плоском движении, получаем  ;
;  .
.
Из треугольника АВР имеем | АР | = 1 м; | ВР | =  м, и тогда
м, и тогда
 .
.
2. Определение ускорений. Вычислим сначала ускорение точки А как точки кривошипа:  .
.
Здесь вращательное ускорение  , так как
, так как  , поскольку
, поскольку  .
.
Тогда полное ускорение точки А равно центростремительному

и направлено к оси вращения — точке О (рис. 8.11).
Для вычисления ускорения точки В воспользуемся теоремой о сложении ускорений, взяв точку А в качестве полюса:
 . (*)
. (*)
Центростремительное ускорение точки В в относительном вращении вокруг точки А по модулю равно  , и направлено от точки В к полюсу — точке А.
, и направлено от точки В к полюсу — точке А.
Модуль вращательного ускорения  определяется по формуле
определяется по формуле  и пока не может быть вычислен, поскольку неизвестна величина углового ускорения
и пока не может быть вычислен, поскольку неизвестна величина углового ускорения  . Направление вектора
. Направление вектора  также не может быть определено однозначно, так как неизвестно направление углового ускорения, т. е. неизвестно, ускоренным или замедленным является поворот шатуна. Примем пока этот поворот ускоренным, тогда направление
также не может быть определено однозначно, так как неизвестно направление углового ускорения, т. е. неизвестно, ускоренным или замедленным является поворот шатуна. Примем пока этот поворот ускоренным, тогда направление  совпадет с направлением
совпадет с направлением  , а вектор направим перпендикулярно отрезку ВА по ходу углового ускорения.
, а вектор направим перпендикулярно отрезку ВА по ходу углового ускорения.
Вектор ускорения точки В направлен по вертикальной прямолинейной направляющей. Будем пока считать движение ползуна ускоренным и направим ускорение  в ту же сторону, что и скорость
в ту же сторону, что и скорость  (рис. 8.10, 8.11).
(рис. 8.10, 8.11).
Теперь в равенстве (*) все ускорения имеют определенное направление, и мы можем записать это уравнение в проекциях на выбранные оси:
 .
.
Из последнего уравнения получаем  , тогда из первого уравнения
, тогда из первого уравнения
 .
.
Отсюда следует, что
 .
.
Отрицательные знаки у величин  и показывают, что их истинные направления противоположны принятым.
и показывают, что их истинные направления противоположны принятым.
Дата публикования: 2014-11-18; Прочитано: 16507 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
