 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Базовые понятия теории и методические рекомендации по решению задач. Кинематика — это раздел теоретической механики, в котором изучают механическое движение материальных тел без рассмотрения условий
|
|
Кинематика — это раздел теоретической механики, в котором изучают механическое движение материальных тел без рассмотрения условий, вызывающих или изменяющих это движение.
Движение материальных тел происходит в пространстве и во времени. Пространство рассматривают как трехмерное евклидово, время в этом пространстве одинаково во всех его точках и не зависит от движения материальных тел.
Под механическим движением понимают изменение положения одного тела относительно другого.
Системой отсчета называют систему координат, связанную с одним из тел. Если тело движется, то система отсчета подвижна, если тело в покое, то система отсчета неподвижна.
Основные задачи кинематики:
1. Установление закона движения тела по отношению к выбранной системе отсчета.
2. Определение по заданному закону движения тела кинематических характеристик этого движения: траектории, скорости, ускорения, угловой скорости и ускорения и т. д.
Движение точки считают заданным, если известен способ, позволяющий установить ее положение относительно выбранной системы отсчета в любой момент времени.
Существуют три способа задания движения точки: векторный, координатный, естественный.
Векторный способ задания движения заключается в задании положения точки радиусом-вектором, который является векторной функцией времени, относительно выбранной точки отсчета.
 .
.
Траектория точки М при векторном способе — это геометрическое место точек концов радиуса-вектора  при изменении времени, т. е. годограф радиуса-вектора.
при изменении времени, т. е. годограф радиуса-вектора.
Годограф — это кривая, которую описывает конец радиуса-вектора при изменении его аргумента, когда начало вектора находится в одной и той же точке.
Скорость точки характеризует быстроту и направление движения точки и равна производной радиуса-вектора точки по времени:
 .
.
В механике производную по времени обозначают точкой над переменной.
Вектор скорости точки направлен по касательной к траектории точки в сторону ее движения.
Ускорение точки характеризует быстроту изменения величины и направления скорости точки и равно первой производной вектора скорости по времени или второй производной радиуса-вектора по времени:
 .
.
Вектор ускорения направлен по касательной к годографу вектора скорости.
Координатный способ задания движения заключается в задании координат точки в виде известных, непрерывных, дважды дифференцируемых функций времени.
В декартовой системе координат уравнениями движения точки будут
 .
.
Скорость точки в декартовых координатах:
 ,
,
где  — проекции вектора скорости на соответствующие оси координат;
— проекции вектора скорости на соответствующие оси координат;
 .
.
Углы вектора скорости с осями координат:
 .
.
Ускорение точки в декартовых координатах:
 ,
,
( — проекции вектора ускорения на соответствующие оси координат):
— проекции вектора ускорения на соответствующие оси координат):
 .
.
Углы вектора ускорения с осями координат:
 .
.
Естественный способ задания движения считается известным, если заданы:
1. Траектория точки.
2. Закон движения точки по траектории  .
.
3. Начало отсчета.
4. Положительное и отрицательное направления движения.
Закон движения также называют дуговой координатой, которую отсчитывают от начального положения. Дуговую координату не следует смешивать с длиной пути, пройденного точкой, так как за начало отсчета может быть выбрана любая точка или движение может быть колебательным.
При естественном способе задания движения точки в качестве координатных осей принимают естественные оси (оси естественного трехгранника):  — касательная,
— касательная,  — нормаль,
— нормаль,  — бинормаль.
— бинормаль.
Скорость точки  ,
,
или
 .
.
Ускорение точки
 .
.
Ускорение точки состоит из двух взаимно перпендикулярных
составляющих. Одна  направлена по касательной к траектории, а другая
направлена по касательной к траектории, а другая  - по нормали к этой траектории в сторону ее вогнутости. Эти составляющие называют соответственно касательным и нормальным ускорениями точки. Они лежат в соприкасающейся плоскости. Проекция ускорения точки на бинормаль равна нулю, так как вектор ускорения расположен в соприкасающейся плоскости (рис. 6.1):
- по нормали к этой траектории в сторону ее вогнутости. Эти составляющие называют соответственно касательным и нормальным ускорениями точки. Они лежат в соприкасающейся плоскости. Проекция ускорения точки на бинормаль равна нулю, так как вектор ускорения расположен в соприкасающейся плоскости (рис. 6.1):
 .
.
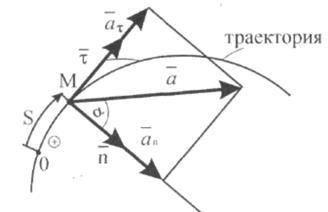
Рис. 6.1
Вектор касательного ускорения
 ,
,
модуль касательного ускорения
 .
.
 Вектор нормального ускорения
Вектор нормального ускорения
 ,
,
модуль нормального ускорения
 .
.
Модуль ускорения равен:
 .
.
Угол отклонения вектора ускорения от нормали составит (рис. 6.1):
 .
.
Дата публикования: 2014-11-18; Прочитано: 1168 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
