 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Введение. Принципиальной особенностью ИСОН для высокоманевренных объектов является более глубокая интеграция данных инерциального модуля и ПА СНС (рис
|
|
Принципиальной особенностью ИСОН для высокоманевренных объектов является более глубокая интеграция данных инерциального модуля и ПА СНС (рис. В1).
Рис.В1. Структурная схема ИСОН с высоким уровнем интеграции
БИИМ – бескарданный инерциальный измерительный модуль; ПА СНС – приемная аппаратура (встроенная в БИИМ плата электроники) спутниковой навигационной системы; ЭКНИС - электронная картографическая навигационно-информационная система; НРЛС - навигационная радиолокационная система; ДП - динамические параметры; НП - навигационные параметры
К настоящему времени уже сложилось определенное понятие об ИСОН в авиации и ракетной технике, где они нашли практическое применение. Среди ИСОН выделяют системы с низким и высоким уровнем интеграции (соответственно со слабой и сильной взаимосвязью ПА СНС и БИИМ). В первом случае (рис. В2) в вычислителе комплексной обработки информации (фильтре Калмана СНС/БИИМ) обрабатываются измерения от СНС и БИИМ на уровне координат местоположения  и линейной скорости
и линейной скорости  объекта. При этом может сохраняться избыточность и независимость выходов СНС и БИИМ. Кроме того, выходные данные БИИМ по координатам местоположения и линейной скорости объекта используются в ПА СНС (в схеме поиска и сбора исходных данных) для задания начальных прогнозируемых значений задержки кода и несущей частоты входного сигнала, давая возможность сократить время поиска и выделения полезного сигнала.
объекта. При этом может сохраняться избыточность и независимость выходов СНС и БИИМ. Кроме того, выходные данные БИИМ по координатам местоположения и линейной скорости объекта используются в ПА СНС (в схеме поиска и сбора исходных данных) для задания начальных прогнозируемых значений задержки кода и несущей частоты входного сигнала, давая возможность сократить время поиска и выделения полезного сигнала.
Это обеспечивает для интегрированного выхода СНС/БИИМ повышение точности в выработке НП (относительно данных СНС из-за сглаживания их шумов) и параметров ориентации (относительно данных БИИМ вследствие постоянной калибровки погрешностей их ЧЭ), а также устойчивости системы при «сбоях» в информации СНС.
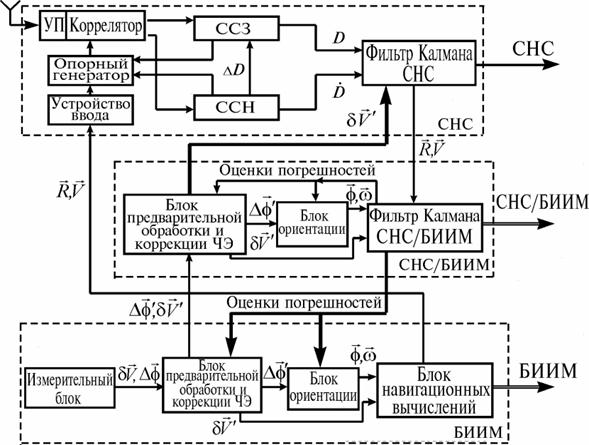
Рис. В2. Блок-схема ИСОН с низким уровнем интеграции:
УП – усилитель и преобразователь входного сигнала СНС; ССЗ – схема слежения задержки по коду, обеспечивающая измерение псевдодальности D для каждого спутника; ССН – схема слежения по несущей частоте, обеспечивающая измерение радиальной скорости 
При введении дополнительных связей в системе в целях коррекции погрешностей инерциальных элементов непосредственно в схеме БИИМ и использования оценок фильтра Калмана СНС/БИИМ по ускорению объекта в ПА СНС:
· точностные характеристики БИИМ и интегрированного выхода СНС/БИИМ практически совпадают;
· улучшаются данные СНС в динамических условиях движения объекта, хотя при этом будет потеряна независимость выходов СНС и БИИМ.
Для ИСОН с высоким уровнем интеграции (рис. В3) прежде всего характерно следующее:
1. В фильтре Калмана СНС/БИИМ разностные измерения формируются на уровне дальности и радиальной скорости для каждого спутника, при этом их измеренные значения (псевдодальность и радиальная скорость) поступают от ПА СНС, а расчетные формируются по данным интегрированного выхода СНС/БИИМ о координатах и скорости объекта и эфемеридам каждого спутника, поступающим от ПА СНС. При этом целесообразно, чтобы от ПА СНС значения дальностей  и радиальных скоростей
и радиальных скоростей  , а также скорости и координаты
, а также скорости и координаты  в гринвичской системе координат поступали уже откорректированными с учетом поправок на тропосферную и ионосферную задержки, учетом сдвига шкал времени и ПА СНС, и быть привязаны к моменту обсервации. Кроме того, данные GPS/ГЛОНАСС должны быть пересчитаны от фазового центра приемной антенны к точке размещения ИБ БИИМ. Синхронизация данных БИИМ и ПА GPS/ГЛОНАСС должна быть не хуже 1 мс.
в гринвичской системе координат поступали уже откорректированными с учетом поправок на тропосферную и ионосферную задержки, учетом сдвига шкал времени и ПА СНС, и быть привязаны к моменту обсервации. Кроме того, данные GPS/ГЛОНАСС должны быть пересчитаны от фазового центра приемной антенны к точке размещения ИБ БИИМ. Синхронизация данных БИИМ и ПА GPS/ГЛОНАСС должна быть не хуже 1 мс.
2. Сформированные в фильтре Калмана СНС/БИИМ отклонения  измеренных значений дальности и радиальной скорости для каждого спутника от их расчетных значений используются в ПА СНС в схемах слежения задержки по коду (ССЗ) и несущей частоте (ССН), обеспечивая им узкую ширину частотной характеристики при слежении даже в условиях высокой динамики объекта и тем самым высокую помехоустойчивость.
измеренных значений дальности и радиальной скорости для каждого спутника от их расчетных значений используются в ПА СНС в схемах слежения задержки по коду (ССЗ) и несущей частоте (ССН), обеспечивая им узкую ширину частотной характеристики при слежении даже в условиях высокой динамики объекта и тем самым высокую помехоустойчивость.
· 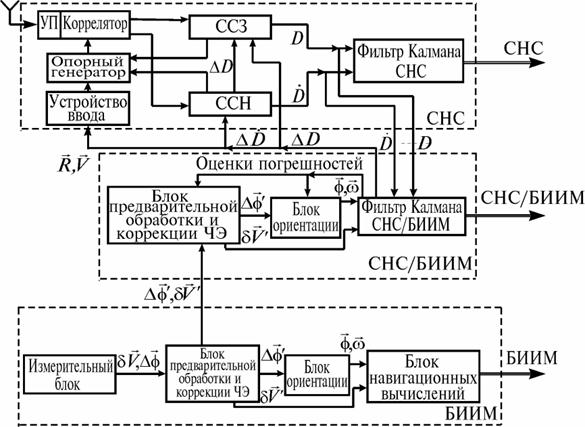
Рис. В3. Блок-схема ИСОН с высоким уровнем интеграции
При этом сохраняется избыточность и независимость выходов СНС и БИИМ. Возможна также и модификация данной системы с введением дополнительных связей по аналогии с приведенной на рис. В2 схемой ИСОН.
Данные системы требуют более производительных вычислительных средств, т.к в этом случае требуется решение нелинейной задачи фильтрации из-за нелинейной зависимости первичных навигационных измерений от оцениваемых параметров и большой их временной изменчивостью по сравнению с оцениваемыми параметрами. В настоящее время для решения этой задачи используются так называемые обобщенные и итерационные обобщенные фильтры Калмана. Вместе с тем ИСОН с высоким уровнем интеграции являются более точными в выработке навигационных и динамических параметров, т.к. оптимально используют все данные СНС и БИИМ, характеризуются более длительным автономным (инерциальным) режимом работы при «сбоях» данных СНС, обеспечивают надежное слежение за спутниками при высокой динамике объекта и отличаются высокой помехоустойчивостью ПА СНС.
Дата публикования: 2014-10-19; Прочитано: 848 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
