 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Определение динамического воздействия на одномассовую систему при нагрузке, возрастающей по линейному закону, приложенной мгновенно и кратковременно
|
|
Рассмотрим влияние различных способов приложения сил, характерных для конструкций подъемно-транспортных машин, на движение системы с одной степенью свободы. При этом будем пренебрегать диссипативными силами, т. е. силами вредных сопротивлений.
Нагрузка, возрастающая по линейному закону. Пусть на массу тм находившуюся в равновесии, подействовала нагрузка, возрастающая в течение времени Т до наибольшего значения Q по линейному закону (рис. 8.2, а).
1. При t с Т дифференциальное уравнение колебаний массы будет muy" + су = Qt/T, откуда
y" + p2y - Qt/(mMT  ), (8.6)
), (8.6)
где с — жесткость связи (конструкции), с = Q/yCT; ус т —статическое перемещение (прогиб) от действия нагрузки Q; р — круговая частота свободных колебаний системы, т. е. число колебаний в 2 п секунд,  . Общее решение уравнения (8.6) запишем в форме
. Общее решение уравнения (8.6) запишем в форме
у = A sin pt + В cos pi + Qt/(p2mMT), (8.7)
или
у = A sin pt + В cos pt + yclt/T. (8,8)
При t = 0, y = 0 и y' = 0 и из выражения (8.8) найдем:  ,
,
B=0, откуда
у = yCT(t-sin pt/p)/T; (8.9)
у' = Уст (1 -cos pt)/T (8.10)
При t = Т из выражений (8.9) и (8.10) получим:
 (8.11)
(8.11)
 , (8.11)
, (8.11)
Из выражения (8,10) видно, что в течение всего промежутка времени i  Т скорость перемещения массы m м положительна (cos pt 1). При t= T у'Т
Т скорость перемещения массы m м положительна (cos pt 1). При t= T у'Т  0 (8.12), т. е. к моменту прекращения нарастания нагрузки масса обладает запасом кинетической энергии, который будет израсходован на дополнительную деформацию системы. Таким образом, наибольшее перемещение система будет иметь при t > Т.
0 (8.12), т. е. к моменту прекращения нарастания нагрузки масса обладает запасом кинетической энергии, который будет израсходован на дополнительную деформацию системы. Таким образом, наибольшее перемещение система будет иметь при t > Т.
2. При f Т дифференциальное уравнение колебаний массы будет тшу" + су = Q, откуда
.  (8.13)
(8.13)
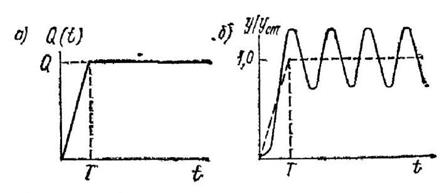
Рис. 8.2. Зависимость силового воздействия (а)и соответствующего ему перемещения массы (б)от времени t
Общее решение уравнения (8.13) запишем в форме
у - С sin р (t — Т) + D cos р (t — Т) +  (8.14) поскольку Q/(p2mM) = ,
(8.14) поскольку Q/(p2mM) = ,
Подставляя в решение (8.14) t =Т и учитывая выражения (8.11) и (8.12), получим:
 . ( 8.15)
. ( 8.15)
Подставим значения С и D из (8.15) в (8.14). Тогда
 =
=
=  =
=
=  (8.16)
(8.16)
Так как период колебаний
 , (8.17)
, (8.17)
то, подставляя его значение в выражение (8.16), найдем
 , (8.18)
, (8.18)
Наибольшее значение перемещения

имеет место при  , причем знак у единицы должен быть взят обратным знаку
, причем знак у единицы должен быть взят обратным знаку  .
.
Отношение максимальных значений перемещений, усилий или вызываемых ими напряжений, возникающих в конструкции в результате динамического действия сил, к значениям, возникающим от статического приложения этих же сил, называется динамическим коэффициентом.
В данном случае динамический коэффициент

Изменения коэффициента нарастания нагрузки kH в зависимости от отношения  представлены на рис. 8.3 штриховой линией.
представлены на рис. 8.3 штриховой линией.
При  ;
;  ; при
; при  ;
; 
Для практического применения изменение коэффициента нарастания нагрузки  , при T > 0,5
, при T > 0,5  принимается по огибающей кривой, показанной на рис. 8.3 сплошной линией.
принимается по огибающей кривой, показанной на рис. 8.3 сплошной линией.
 (8.20)
(8.20)
Как видно, при T / = 6,5  . Это значит, что, если период развития нагрузки T более чем в 6,5 раз превышает период свободных колебаний системы, динамическим влиянием нагрузки на систему можно пренебречь (с точностью до 5 %). На рис. 8.2, б показано перемещение массы ты в процессе колебаний для t T по уравнению (8.9) и для t < T по уравнению (8.18). Колебания происходят вокруг статического отклонения системы (штриховая линия), которое для t < T равномерно возрастает, а для t > T остается постоянным и равным .
. Это значит, что, если период развития нагрузки T более чем в 6,5 раз превышает период свободных колебаний системы, динамическим влиянием нагрузки на систему можно пренебречь (с точностью до 5 %). На рис. 8.2, б показано перемещение массы ты в процессе колебаний для t T по уравнению (8.9) и для t < T по уравнению (8.18). Колебания происходят вокруг статического отклонения системы (штриховая линия), которое для t < T равномерно возрастает, а для t > T остается постоянным и равным .
Нагрузка, приложенная мгновенно. Такая нагрузка есть частный случай нагрузки, возрастающей по линейному закону, при  . Колебания происходят около положения статического равновесия [см. формулу (8.18)], и
. Колебания происходят около положения статического равновесия [см. формулу (8.18)], и  = 2уCT.
= 2уCT.
Нагрузка, приложенная кратковременно. Пусть к массе m м, находившейся в равновесии, была приложена мгновенно нагрузка. которая по истечении времени t 1 так же внезапно была снята (рис. 8.4). Если  , то наибольшее перемещение достигнет значения двойного статического, т. е. в этом случае независимо от значения
, то наибольшее перемещение достигнет значения двойного статического, т. е. в этом случае независимо от значения  . Если
. Если  , то
, то  . Если t1 < / 4, то во время действия нагрузки деформация не достигнет значения, получающегося при статическом нагружении.
. Если t1 < / 4, то во время действия нагрузки деформация не достигнет значения, получающегося при статическом нагружении.
Круговая частота р и период [см. формулу (8.17)) свободных колебаний. Эта параметры являются основными динамическими характеристиками конструкций. Круговая частота
, (8.21)
где m м —действительная масса в одномассовой системе и приведенная в многомассовой, совершающей одно из главных колебаний; с действительная или приведенная жесткость конструкции.

Рис. 8.3. Зависимость коэффициента нарастания нагрузки kH от Т/т

Рис. 8.4. Схема внезапного действия нагрузки на конструкцию
Техническая частота равна
n = 60р/(2  ), ' (8.22)
), ' (8.22)
т. е. числу колебаний в минуту.
На частоту свободных колебаний можно воздействовать изменением массы и жесткости конструкций. Обычно динамически неудачные конструкции обладают малой частотой свободных колебаний. Для увеличения частоты колебаний конструкции нужно уменьшать ее массу. Однако возможностей заметного уменьшения массы конструкции, как правило, нет, поскольку всегда стремятся к созданию конструкций минимальной массы. Увеличения частоты в динамически неудачной конструкции обычно достигают за счет повышения ее жесткости. Жесткость можно увеличивать, изменяя сечения элементов конструкции или ее геометрическую схему. Последний путь более рационален. Жесткость повышается с увеличением высоты ферм и балок, при добавлении новых связей и т. п.
Затухание колебаний конструкций. Колебания, возникающие в периоды разгона и торможения, имеют важное значение. Стремление к снижению массы металлических конструкций кранов привело к тому, что были отмечены случаи создания таких конструкций, которые в результате обычных операций по разгону и торможению груза начинали совершать медленно затухающие колебания, мешающие нормальной эксплуатации кранов. Приэтом статические и динамические напряжения и прогибы у конструкций этих кранов находились в обычных допустимых пределах. Такие медленно затухающие колебания конструкций и груза в ряде случаев снижают производительность крана при совершении им достаточно точных сборочных работ и отражаются неблагоприятно на самочувствии крановщика, особенно если кабина совершает колебания большой амплитуды, например, когда у мостового крана она расположена в середине пролета. 
Рис. 8.5. Схема затухания колебаний
Известно также, что на некоторых типах башенных кранов в результате действия колебаний крановщики испытывали тошноту и головокружение.
Затухание упругих колебаний конструкций происходит по закону экспоненты (рис. 8.5). Первоначальная амплитуда колебаний , характеризующая динамическую жесткость металлической конструкции, по истечении времени t и совершения  колебаний равна
колебаний равна
 (8.23)
(8.23)
где  —логарифмический декремент затухания, равный разности логарифмов двух последовательных амплитуд у1 > у2, т. е.
—логарифмический декремент затухания, равный разности логарифмов двух последовательных амплитуд у1 > у2, т. е.  ;
;  — коэффициент затухания, а п0 — коэффициент сопротивления в уравнении колебаний
— коэффициент затухания, а п0 — коэффициент сопротивления в уравнении колебаний  . Из формулы (8.23) время затухания
. Из формулы (8.23) время затухания
 (8.24)
(8.24)
Первоначальная амплитуда и допустимое время затухания колебаний зависят от типа крана и условий его эксплуатации. Коэффициент затухания е может быть определен только экспериментальным путем. Для коробчатых крановых мостов  (для H/l от 1/12 до 1/18) при t от 5 до 30 с. При колебаниях рабочего места с частотами до 5 Гц, что характерно для многих крановых конструкций, для организма человека не опасны ускорения до 50 см/с2. Если колебания конструкции или кабины чрезмерны, целесообразно не снижать напряжения в конструкции, увеличивая ее вес, а использовать гасители колебаний или виброизоляцию места крановщика.
(для H/l от 1/12 до 1/18) при t от 5 до 30 с. При колебаниях рабочего места с частотами до 5 Гц, что характерно для многих крановых конструкций, для организма человека не опасны ускорения до 50 см/с2. Если колебания конструкции или кабины чрезмерны, целесообразно не снижать напряжения в конструкции, увеличивая ее вес, а использовать гасители колебаний или виброизоляцию места крановщика.
Дата публикования: 2014-11-18; Прочитано: 1061 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
