 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Пространственные фермы
|
|
Плоская ферма находится в равновесии, если действующие на нее силы располагаются строго в ее плоскости. Так как практически это не имеет места, то плоская ферма для ее устойчивости должна иметь закрепления, не лежащие в ее плоскости. Таким образом, все решетчатые конструкции по принципу их образования фактически являются пространственными.
Способы образования пространственных ферм и условия их геометрической неизменяемости
Для определения зависимости между числом стержней пространственной системы С и количеством ее узлов У рассмотрим элемент фермы на рисунке 4.23, а. К первоначальному треугольнику АВС присоединен с помощью трех стержней узел D. Узлы в пространственных фермах так же, как и в плоских, считаем шарнирными. Тогда
С = 3 + (У — 3) 3 = ЗУ — 6. (4.18)
Так как для своей неподвижности геометрически неизменяемая система должна иметь шесть стержней закрепления, а для каждого вырезанного узла имеются три уравнения статики, то условие (4.18) соответствует статически определимой системе. Это условие, связывающее число неизвестных с числом уравнений» можно было бы записать и так: С + 6 = ЗУ.
Таким образом, условие (4.18) для статической определимости и геометрической неизменяемости системы является необходимым. Однако оно не является достаточным по тем же причинам, которые были рассмотрены выше при анализе вопроса об образований плоских ферм. Для установления достаточности условия (4.18) требуется произвести структурный анализ системы. Внешним признаком того, что пространственная система удовлетворяет условиям статической определимости и геометрической неизменяемости, является образование ее из геометрически неизменяемых плоских ферм без лишних стержней, что, как правило, при панелях треугольного очертания имеет место в конструкциях подъемно-транспортных машин.

Рисунок 4.23. Схема образования пространственных стержневых систем
Опоры пространственных ферм могут воспринимать одну реакцию (рисунок 4.23, б — опора на шарах), две реакции (рисунок 4.23, в — опора на цилиндрах) и три реакции (рисунок 4.23, г — неподвижная опора). Заделка в общем случае может иметь все три реакции и три реактивных момента. При числе опорных стержней больше шести система будет внешне статически неопределимой.
Определение усилий в стержнях ферм методом вырезания узлов
Принципиально метод вырезания узлов для определения усилий в стержнях пространственных ферм тот же, что и для плоских. Разница заключается лишь в том, что для определения усилий в вырезанном узле плоской фермы имеются два уравнения в проекциях на оси координат, а пространственной — три.
Последовательность вырезания узлов пространственной фермы начинается с узлов, в которых сходятся три стержня, не лежащие в одной плоскости. Искомые усилия в этих стержнях могут быть определены либо графически — путем разложения приложенной в узле нагрузки на три направления, либо аналитически — при помощи трех уравнений статики в пространстве для сил, сходящихся в одной точке. Рассмотрев узлы, в которых сходятся три стержня, приступают к рассмотрению узлов, в которых сходятся хотя и более трех стержней, но неизвестны лишь три из них, не лежащие в одной плоскости. Для определения усилий в стержнях пространственных ферм может также использоваться метод сквозных сечений.
Решение значительно упрощается при наличии в ферме нулевых стержней, которые находятся на основании следующих положений.
1. Если в узле пересекается система сил (усилия в стержнях и внешние силы), причем все, кроме силы N в одном стержне, лежат в одной плоскости, то усилие в стержне N = 0. Это ясно, если рассмотреть проекцию всех сил на нормаль к этой плоскости.
2. Если в ненагруженном узле сходятся три стержня, не лежащие в одной плоскости, то все они нулевые. Действительно! складывая усилия в двух стержнях в одну равнодействующую, получаем две силы, находящиеся под углом. Без внешней нагрузки они не могут находиться в равновесии.
Определение усилий в стержнях пространственных ферм методом вырезания узлов весьма трудоемко и может быть целесообразно либо в случаях, когда в ферме мало стержней, либо в случаях, когда требуется определить усилия лишь в нескольких стержнях.
6. Определение усилий в стержнях пространственных ферм методом разложения их на плоские фермы
Поскольку расчет пространственных систем по сравнению с расчетом плоских значительно сложнее, практически пространственные системы, применяемые в подъемно-транспортных машинах и образованные из плоских геометрически неизменяемых систем, рассчитывают приближенными способами.
Наиболее распространенным является способ расчета пространственных ферм путем разложения их на плоские. Рассчитывать выделенные из пространственной фермы плоские фермы как работающие изолированно без взаимной связи со смежными без погрешности можно лишь в случае, если загружение пространственной фермы всегда симметрично, а также симметрично ее закрепление. При отсутствии симметрии в загружении и закреплении, когда пространственная система испытывает закручивание, неполный учет работы элементов, не лежащих в плоскости выделяемой фермы, приводит к неверному пониманию работы пространственной конструкции и к неверному расчету некоторых из ее элементов.
Рассмотрим метод расчета пространственных ферм, в котором при расчленении пространственной фермы на плоские последние загружаются не только внешними (заданными и реактивными) силами, но и силами взаимодействия со смежными фермами, направленными по линиям пересечения плоскостей смежных ферм. Эти силы являются внутренними для системы в целом и внешними для выделяемых из нее ферм. Указанный метод нашел широкое применение в практике краностроения [1], хотя он не является универсальным, так как требует корректировки для конструкций, у которых хотя бы в одном из узлов сходятся четыре или более плоскостей [1].
Рассмотрим в качестве примера кручение элементарной четырехгранной призмы (рисунок 4.24). Из уравнения моментов реакции опор R = Pb/с, а остальные пять уравнений статики обращаются в тождества. У стрелок, обозначающих внешние силы Р и R, наконечники светлые, а у обозначающих внутренние силы, — черные.
Расчленим пространственную систему на шесть плоских ферм. Внешние силы Р будем считать приложенными к ферме 1—1'—2—2' конечно, результаты решения не изменились бы, если бы, например, одна сила Р была отнесена к ферме 1—2—3—4, а другая — к ферме 1'—2'—3'—4'. Важно лишь, чтобы каждая внешняя сила была учтена в расчете один раз. То же относится и к реакциям опор. При выделении фермы 1—1'—2—2' к узлу 1 надо приложить силы F1 (проекция усилия в стержне 1—3') и F2(проекции усилия в стержне 1 —4 на направления стержней 1—1' и 1—2). Силы, которые надо приложить к узлу 2, численно, очевидно, также равны F1 и F2 и дают момент, обратный по направлению моменту от сил Р (из равновесия фермы 1— 1' —2—2'). Рассуждая аналогично, находим внутренние силы взаимодействия, приложенные у каждой из плоских ферм. Неизвестных сил при рассмотрении равновесия каждой из выделяемых плоских ферм оказывается лишь три, для их определения из условий равновесия плоских ферм получаем следующие уравнения:
Рb = F2b + F1c; F2a = F3c; F1a = F3b.(4.24)

Рисунок 4.24 – Схема расчленения четырехгранно й фермы на плоские фермы.
Все другие уравнения, которые можно написать из условий равновесия плоских ферм, дают тождества, поскольку они были уже использованы. Положительные значения сил Fly F2 и F3 показывают правильность принятого для них направления. В процессе расчленения пространственной системы надо следить за тем, чтобы каждая из внутренних сил в итоге оказалась взаимно уравновешенной, т. е. приложенной у двух плоских ферм в одном и том же узле и в противоположных направлениях. После нахождения внутренних сил определяются усилия в стержнях плоских ферм. Действительные усилия в стержнях, общих для двух смежных ферм, определяются суммированием усилий, полученных при расчете обеих плоских ферм.
Если расчленяемая система состоит из ряда панелей, то на каждом прямолинейном участке фермы достаточно ввести одну равнодействующую всех сил взаимосвязей, приложенных к узлам фермы. Действительно, перенесем силу взаимодействия Fa, возникающую в узле а, в узел а (рисунок 4.25, а). Тогда в поясе на участке а — b у фермы 1 усилие измелится на величину Fa но на такую же величину с обратным знаком оно изменится на этом же участке пояса фермы 2. Так как результирующее усилие в поясе есть алгебраическая сумма усилий в нем, полученная из рассмотрения ферм 1 и 2, перенос силы Fa из узла а в узел b усилия в поясе не меняет, а потому вместо сил Fa, Fb,... достаточно ввести в расчет на каждом прямом участке их равнодействующую. Перенос силы Fа вдоль прямолинейного пояса также не меняет усилий в раскосах, что видно из рисунка 4.25, а, где усилие в раскосе N = Рт/п.
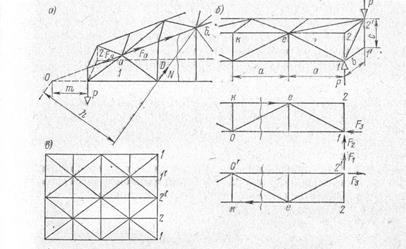
Рисунок 4.25 – Определение в элементах пространственной фермы усилий от кручения
Направление раскосов в работающих на кручение пространственных системах имеет важное значение, так как от него зависят усилия в поясах от кручения. На рисунке 4.25 принято такое направление раскосов, при котором пояса пространственной фермы прямоугольного поперечного сечения не испытывают усилий от кручения. То, что в данном случае пояса являются нулевыми стержнями, видно из рассмотрения равновесия вырезанных узлов 2, 3, 1' и 4'. Пусть имеет место кручение многопанельной призмы (Рисунок 4.25, б) с решеткой такого типа, как показанная на рисунке 1.32. Сжимающее усилие в панели пояса k — е передней грани равно F22a/e, а растягивающее усилие в этой же панели верхней грани равно Ft2a/b. Из уравнений (4.24) очевидно, что FJc = FJb и стержень k — е, как и все четыре пояса этой призмы, усилий от кручения не испытывает. Это всегда будет иметь ме€то, если в смежных плоскостях раскосы будут направлены так, что для данной панели пояса в обеих плоскостях моментные точки будут находиться в одном сечении; при этом от крутящего момента в раскосах будет происходить чередование знаков усилий — если один сжат, то следующий растянут, и т. д. В развернутом виде такая решетка показана на рисунке 4.25, в. На рисунке 4.25, а показана решетка, при которой пояса испытывают усилия от кручения. Жесткость на кручение у стрелы с решеткой по рисунку 4.25, г примерно на 30 % меньше, чем у стрелы с решеткой по рисунку 4.25, б [1 ].
В целях механизации вычислительных процессов при решении задач строительной механики, особенно сложных, примером чему являются пространственные системы, в настоящее время стали широко использоваться ЭВМ.
Дата публикования: 2014-11-18; Прочитано: 4263 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
