 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Силы инерции
|
|
Так как звено механизма состоит из отдельных материальных точек, ускорения которых в общем случае различны, то необходимо определить те силовые параметры, к которым приводится в общем случае сумма сил инерции материальных точек звена. Предположим, что звено имеет материальную плоскость симметрии, параллельную плоскости движения.
Система сил инерции звена, как и всякая плоская система сил, приложенная к твердому телу, в общем случае приводится к одной силе РИ. Ее модуль равен массе звена, умноженной на модуль ускорения центра масс звена, а направлена она в сторону, противоположную этому ускорению. Выясним положение прямой АВ линии действия силы РИ (рис.3.1). Из дифференциальных уравнений плоскопараллельного движения твердого тела, находящегося под действием некоторых сил, видно, что это движение может быть осуществлено, если в центре S масс тела приложить силу, равную главному вектору системы, и пару, момент которой
M = JSε, (3.1)
где JS — момент инерции тела относительно оси, проходящей через точку S перпендикулярно плоскости движения; ε — угловое ускорение тела.
В таком случае система сил инерции, как условно уравновешивающая заданную систему сил, также приводится к силе
 , (3.2)
, (3.2)
приложенной в точке S и направленной в сторону, противоположную направлению вектора  ускорения центра S масс, и к паре с моментом
ускорения центра S масс, и к паре с моментом
MИ = -JSε, (3.3)
направление которого противоположно угловому ускорению ε. Мы привели силы инерции материальных точек звена к силе и к паре.
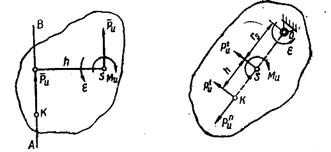 |
Рис. 3.1 Рис. 3.2
Однако параллельным переносом в точку К вектора РИ силу и пару можно заменить одной силой. Момент присоединенной пары:
MИ = -PИh.
Отсюда следует, что PИh = JSε и, следовательно,
h =  . (3.4)
. (3.4)
Итак, система сил инерции звена, находящегося в плоскопараллельном движении, в общем случае может быть приведена либо к одной силе
 , (3.5)
, (3.5)
приложенной в некоторой точке К, либо к главному вектору сил инерции
, (3.6)
приложенному в центре S масс звена и к паре сил инерции с моментом
MИ = -JSε. (3.7)
Если звено движется поступательно, то его угловое ускорение ε равно нулю и в этом случае систему сил инерции его материальных точек приводят к одной силе (3.5), линия действия которой проходит через центр S масс.
При вращении звена вокруг неподвижной оси О (рис. 3.2) главный вектор и главный момент сил инерции его материальных точек можно определить из равенств (3.6) и (3.7). Основываясь на равенстве (3.4), главный вектор и главный момент сил инерции можно привести к одной силе.
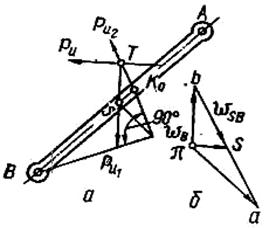 |
Рис. 3.3
Разложим силу инерции РИ, приложенную в точке К, на две составляющие: нормальную  и тангенциальную
и тангенциальную  , модуль которой
, модуль которой
 .
.
Так как момент нормальной составляющей  относительно центра S масс равен нулю, то вместо равенства (8.4) можно написать
относительно центра S масс равен нулю, то вместо равенства (8.4) можно написать
 (3.8)
(3.8)
Точка К, через которую проходит линия действия результирующей сил инерции звена, называется центром качаний.
Таким образом, силы инерции материальных точек звена можно привести к одной силе, линия действия которой в случае поступательного движения проходит через центр масс, в случае вращательного движения — через центр качаний и при плоскопараллельном движении звена — через точку, смещенную относительно центра масс на расстояние, определяемое равенством (3.8).
Задачу об определении точки приложения равнодействующей силы инерции звена можно решить также способом, основанным на разложении плоскопараллельного движения звена на поступательное с ускорением, равным ускорению произвольной точки звена, и на вращательное вокруг оси, проходящей через эту точку и перпендикулярной к плоскости движения. Пусть закон распределения ускорений точек звена АВ (рис. 3.3, а) задан планом ускорений (рис. 3.3, б).
Сила инерции  в переносном поступательном движении равна произведению массы m звена на ускорение любой точки звена, например, точки В, и приложена в центре тяжести S звена.
в переносном поступательном движении равна произведению массы m звена на ускорение любой точки звена, например, точки В, и приложена в центре тяжести S звена.
Сила инерции  в относительном вращательном движении звена вокруг точки В, складываясь с парой сил инерции, дает результирующую силу, которая приложена в центре качания К0 звена, в предположении, что точкой подвеса звена является точка В. Положение точки К0 определяется но формуле (3.8)
в относительном вращательном движении звена вокруг точки В, складываясь с парой сил инерции, дает результирующую силу, которая приложена в центре качания К0 звена, в предположении, что точкой подвеса звена является точка В. Положение точки К0 определяется но формуле (3.8)  . Направление силы противоположно ускорению ωB точки В, т. е противоположно вектору
. Направление силы противоположно ускорению ωB точки В, т. е противоположно вектору  , а направление силы инерции противоположно ускорению ωSB, т. е. противоположно вектору
, а направление силы инерции противоположно ускорению ωSB, т. е. противоположно вектору  плана ускорений. Точка пересечения линий действия сил и , т. е. прямых, проведенных через точку S параллельно πb и через точку Ко параллельно bs, определит точку T, через которую проходит линия действия результирующей силы инерции
плана ускорений. Точка пересечения линий действия сил и , т. е. прямых, проведенных через точку S параллельно πb и через точку Ко параллельно bs, определит точку T, через которую проходит линия действия результирующей силы инерции  . Величину и направление силы
. Величину и направление силы  определяют по формуле (3.5).
определяют по формуле (3.5).
Дата публикования: 2014-11-02; Прочитано: 832 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
