 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Кинетостатический расчет механизмов
|
|
Кинетостатический метод расчета позволяет, как указано выше, находить реакции в кинематических парах, или, иначе говоря, определять те давления, которые возникают в местах соприкосновения элементов кинематических пар, а также находить уравновешивающую силу или уравновешивающий момент пары сил.
При решении задач кинетостатики механизмов закон движения ведущего звена, а также массы и моменты инерции звеньев механизма предполагаются заданными, внешние силы и моменты сил также будем считать в каждом положении механизма известными.
Силовой расчет механизмов будем вести в предположении, что трение в кинематических парах отсутствует и все силы, действующие на звенья механизма, расположены в одной плоскости. При отсутствии сил трения сила взаимодействия между двумя звеньями всегда направлена по нормали к поверхности их касания. В поступательной паре все элементарные силы взаимодействия и их равнодействующая будут расположены перпендикулярно направляющей поступательной пары.
Наиболее удобным методом силового расчета механизмов является метод планов сил. При силовом расчете механизм расчленяется на отдельные группы; при этом необходимо придерживаться общеизвестного из статики сооружений положения об установлении порядка расчета, который будет обратным порядку кинематического исследования, т.е. силовой расчет начинается с группы, присоединенной последней в процессе образования механизма, и заканчивается расчетом ведущего звена начального механизма. Если плоский механизм имеет одну степень свободы, то начальный механизм состоит из двух звеньев: неподвижного (стойка) и начального звена. Эти звенья образуют либо вращательную кинематическую пару (кривошип — стойка), либо поступательную пару (ползун — направляющие). Звено, к которому приложена уравновешивающая сила Ру, будем считать при силовом расчете начальным звеном механизма. Реакция в начальном вращательном механизме зависит от способа передачи энергии начальному звену источником энергии.
При исследовании механизмов двигателей кривошип условно принимают за начальное звено. В этом случае реакция в начальном вращательном механизме зависит от способа передачи энергии кривошипом рабочему звену. Если кривошипный вал приводится во вращение' парой, например, непосредственно от электродвигателя, то в этом случае к валу приложен уравновешивающий момент (рис. 3.4)
My = R3,2h H×м (3.9)
и реакция в опоре О вала (звено 1) будет равна действию звена 3 на звено 2 (кривошип)
R1,2 = -R3,2 . (3.10)
Если же кривошипный вал приводится во вращение одной силой, например, через зубчатый редуктор (рис. 71), то на зубчатое колесо 2, сблокированное с кривошипом, действует со стороны сопряженного колеса уравновешивающая сила Ру, расположенная под углом γ = (90° — α) к линии центров колес (α — угол зацепления); величину уравновешивающей силы определяют из равенства
 . (3.11)
. (3.11)
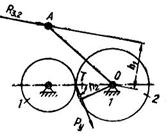
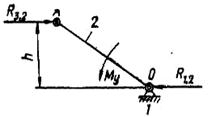
Рис. 3.4 Рис. 3.5
Для определения давления R1,2 звена 1 на звено 2 напишем уравнение равновесия сил, действующих на звено 2:
 (3.12)
(3.12)
Реакцию R1,2 можно получить непосредственно из уравнения построением силового треугольника.
Рассмотрим на примере двухповодковой группы с тремя шарнирами два способа силового расчета, основанные на методе планов сил. Пусть звенья АС и ВС (рис. 3.6, а) составляют последнюю двухповодковую группу в механизме и пусть звено АС (звено 2) нагружено силой Р2 и парой с моментом М2, а звено ВС (звено 3) нагружено силой Р3 и парой с моментом М3; линии действия, величина и точки приложения обеих сил заданы. Приложенные силы откладываем на чертеже в масштабе μр. При выделении из механизма группы или отдельного звена необходимо действие отсоединенной части механизма заменить реакциями, приложенными к соответствующим элементам кинематических пар. Условимся силу, действующую на звено i со стороны звена k, обозначать через Rki. Требуется найти силы взаимодействия звеньев между собой, т. е. реакцию R2,3 либо R3,2 в шарнире С и давления отсоединенных звеньев 1 и 4 механизма на звенья 2 и 5, т. е. реакции R1,2, R4,3 в шарнирах А и В.
 .
.
Рис. 3.6
Прикладываем в точках А и В неизвестные реакции R1,2 и R4,3 и составляем уравнение равновесия группы АСВ, т. е. приравниваем нулю сумму всех сил, действующих на группу:
 . (3.13)
. (3.13)
В этом уравнении известны: величина, направление, точка приложения сил Р2 и Р3, а также точки приложения реакций R1,2 и R4,3. Таким образом, написанного векторного уравнения с четырьмя неизвестными для решения задачи недостаточно. Поэтому для определения величины реакций R1,2 и R4,3 выражаем как по первому, так и по второму способу каждую из реакции двухшарнирного звена в виде геометрической суммы двух составляющих. При этом по первому способу одну из составляющих  реакции R1,2 и
реакции R1,2 и  реакции R4,3 направляем по осям АС и ВС звеньев 2 и 3, а другую составляющую
реакции R4,3 направляем по осям АС и ВС звеньев 2 и 3, а другую составляющую  реакции R1,2 и
реакции R1,2 и  реакции R4,3 направляем перпендикулярно этим осям; (линии действия составляющих, ,
реакции R4,3 направляем перпендикулярно этим осям; (линии действия составляющих, ,  , , на рис. 72, а показаны пунктирными линиями). Получаем
, , на рис. 72, а показаны пунктирными линиями). Получаем
 (3.14)
(3.14)
Величины  и
и  можно получить из уравнений равновесия составленных для звеньев 2 и 3 в отдельности. Для этого рассмотрим сначала равновесие звена 2. Звено 2 находится под действием следующих сил и пар: силы Р2, пары с моментом М2, составляющих
можно получить из уравнений равновесия составленных для звеньев 2 и 3 в отдельности. Для этого рассмотрим сначала равновесие звена 2. Звено 2 находится под действием следующих сил и пар: силы Р2, пары с моментом М2, составляющих  и реакции R1,2 и реакции R3,2. Составляем уравнение моментов Мс(Рi) всех сил относительно точки С. Так как направление составляющей пока неизвестно, то при составлении уравнения моментов задаемся произвольным направлением ее. Если после определения величина этой составляющей окажется отрицательной, то ее истинное направление будет противоположно выбранному. Так как
и реакции R1,2 и реакции R3,2. Составляем уравнение моментов Мс(Рi) всех сил относительно точки С. Так как направление составляющей пока неизвестно, то при составлении уравнения моментов задаемся произвольным направлением ее. Если после определения величина этой составляющей окажется отрицательной, то ее истинное направление будет противоположно выбранному. Так как
 и
и  , а
, а  ,
,
то уравнение моментов напишется так:
 ;
;
откуда
 . (3.15)
. (3.15)
Из этой формулы ясно, что направление , показанное на рис. 3.6, а пунктирной линией, нужно изменить на обратное (показано сплошной линией).
Аналогично из условия равновесия звена 3 имеем уравнение моментов
 ,
,
откуда
 ; (3.16)
; (3.16)
истинное направление  показано на чертеже сплошной линией.
показано на чертеже сплошной линией.
Полученные выражения для и подставляем в уравнение (3.13)
 . (3.17)
. (3.17)
В это векторное уравнение входят только два неизвестных скаляра — величины составляющих и  реакций R1,2 и R4,3, направленных по осям АС и ВС звеньев 2 и 3. Поэтому задачу можно решить графически методом построения плана сил. Для этого из любой точки а плоскости (рис. 3.6, б) откладываем в произвольном масштабе μр составляющую
реакций R1,2 и R4,3, направленных по осям АС и ВС звеньев 2 и 3. Поэтому задачу можно решить графически методом построения плана сил. Для этого из любой точки а плоскости (рис. 3.6, б) откладываем в произвольном масштабе μр составляющую  реакции
реакции  в виде вектора
в виде вектора  . К вектору геометрически прибавляем вектор
. К вектору геометрически прибавляем вектор  , изображающий в том же масштабе μр силу Р2. Продолжая далее геометрическое сложение в порядке, указанном в уравнении (3.17), получаем последовательно вектор
, изображающий в том же масштабе μр силу Р2. Продолжая далее геометрическое сложение в порядке, указанном в уравнении (3.17), получаем последовательно вектор  , изображающий силу Р3, вектор
, изображающий силу Р3, вектор  , изображающий составляющую
, изображающий составляющую  реакции
реакции  .
.
Далее через начало а вектора проводим прямую в направлении действия второй составляющей  реакции , т. е. параллельно оси АС звена 2, а через конечную точку е вектора прямую в направлении действия составляющей
реакции , т. е. параллельно оси АС звена 2, а через конечную точку е вектора прямую в направлении действия составляющей  реакции , т. е. параллельно оси ВС звена 3. Точка f пересечения этих прямых определяет начало вектора
реакции , т. е. параллельно оси ВС звена 3. Точка f пересечения этих прямых определяет начало вектора  составляющей и конечную точку вектора
составляющей и конечную точку вектора  составляющей . Полные реакции и можно получить согласно уравнениям (3.14). Соединив точку f с точкой b, получим реакцию в виде вектора
составляющей . Полные реакции и можно получить согласно уравнениям (3.14). Соединив точку f с точкой b, получим реакцию в виде вектора  . Величину реакции в виде вектора
. Величину реакции в виде вектора  определим, если соединить точки d и f. Таким образом, определены величины и направления искомых реакций и .
определим, если соединить точки d и f. Таким образом, определены величины и направления искомых реакций и .
Для определения давления  звена 3 на звено 2 напишем уравнение равновесия сил, действующих на звено 2:
звена 3 на звено 2 напишем уравнение равновесия сил, действующих на звено 2:
 .
.
Единственной неизвестной по величине силой в этом уравнении является сила . Величину ее можно получить непосредственно из уравнения построением силового треугольника. Для этого в плане сил (рис. 3.6, б) достаточно соединить точки с и f. Очевидно, что реакцию  , равную по величине реакции , но противоположную ей по направлению, можно определить из уравнения равновесия звена 3:
, равную по величине реакции , но противоположную ей по направлению, можно определить из уравнения равновесия звена 3:
 .
.
В плане сил вектор представлен тем же отрезком (fc), что и реакция , но противоположно направлен. При определении реакций по второму методу будем полагать, что все внешние силы и пары сил, приложенные к звену, а также силы инерции и пары их заменены одной равнодействующей силой. Этот метод заключается в следующем. Реакцию , приложенную в центре шарнира А, разлагаем на две составляющие таким образом, чтобы одна из них была направлена параллельно линии действия, равнодействующей сил, приложенных к звену, а другая — по оси звена. Величину первой из них определяем непосредственно из условия равновесия звена. Так, выделяя из двухповодковой группы звено 3, раскладываем силу Р3 на две составляющие RB и RC, параллельные линии действия силы Р3 и приложенные соответственно в центрах В а С шарниров. Таким образом, одна из составляющих реакций в каждом из шарниров В и С полностью известна; другая составляющая  обеих реакций, направленная по оси ВС звена, неизвестна по величине. На рис. 3.6, а показано разложение силы Р3, приложенной к звену 3. Для этого в центре шарнира С или В параллельно линии действия силы Р3 откладываем отрезок CD, изображающий в масштабе μp силу
обеих реакций, направленная по оси ВС звена, неизвестна по величине. На рис. 3.6, а показано разложение силы Р3, приложенной к звену 3. Для этого в центре шарнира С или В параллельно линии действия силы Р3 откладываем отрезок CD, изображающий в масштабе μp силу  . Конец D отложенного отрезка соединяем прямой DB с точкой В. Через точку F пересечения линии действия вектора и прямой DB проводим параллельно оси СВ звена прямую FE, которая и разделит отрезок DC на части, обратно пропорциональные расстояниям между точками приложения слагаемых сил и равнодействующей. Таким образом, одна из составляющих
. Конец D отложенного отрезка соединяем прямой DB с точкой В. Через точку F пересечения линии действия вектора и прямой DB проводим параллельно оси СВ звена прямую FE, которая и разделит отрезок DC на части, обратно пропорциональные расстояниям между точками приложения слагаемых сил и равнодействующей. Таким образом, одна из составляющих  реакции
реакции  , приложенной в центре шарнира В, и
, приложенной в центре шарнира В, и  реакции,
реакции,  приложенной в центре шарнира С, известна по величине и направлению; вторые составляющие
приложенной в центре шарнира С, известна по величине и направлению; вторые составляющие  и
и  реакций направлены по оси звена ВС в противоположные стороны. Аналогично раскладываем также и силу Р2 на составляющие
реакций направлены по оси звена ВС в противоположные стороны. Аналогично раскладываем также и силу Р2 на составляющие  и
и  , приложенные в центрах шарниров А и С (рис. 3.6, а). Тогда получаем
, приложенные в центрах шарниров А и С (рис. 3.6, а). Тогда получаем
 (3.18)
(3.18)
Для определения реакций R1,2 и R4,3 применяем способ, вытекающий из условия равновесия рассматриваемой группы. Из этого условия следует, что
 (3.19)
(3.19)
Величины составляющих и  можно легко определить из построения по указанному выше способу плана сил в соответствии с векторным уравнением (3.19). Рассмотрим примеры применения методов силового расчета.
можно легко определить из построения по указанному выше способу плана сил в соответствии с векторным уравнением (3.19). Рассмотрим примеры применения методов силового расчета.
Дата публикования: 2014-11-02; Прочитано: 1918 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
