 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Кинематика. В Республике Беларусь подоходный налог в большинстве случаев взимается через налоговых агентов, выплачивающих доходы физическим лицам
|
|
Предисловие
к первой части курса лекций по физике.
"Бурное развитие физики, наблюдаемое за ряд последних десятилетий, ее универсальное и руководящее проникновение в смежные с ней и даже далекие области знания (радио-, гео-, агро-, био-, астрофизика, космология, химия, медицина, техника, производство и т.д.) поставило среднюю и особенно высшую школу во всем мире перед сложнейшей проблемой новой организации преподавания этой науки.
Два обстоятельства в первую очередь затрудняют ее решение. С одной стороны, наличие огромного информационного материала и необходимость такого его отбора для преподавания и изыскания таких форм преподавания, которые обеспечили бы в заданное и относительно короткое время достаточную по широте и глубине и гармоническую в целом подготовку по курсу физики. С другой стороны, дополнительную трудность представляет тот глубокий разрыв, который существует во многих случаях, как в области общего, так и специального образования, между значением современной физики и уровнем подготовки по ней.
Проблема сложна и в том отношении, что разделяется на ряд задач, касающихся различных видов общей и специальной профессиональной, в том числе инженерной, подготовки." – А.С. Ахматов
Понятно, что по ряду упомянутых выше причин, во всех развитых государствах, в том числе и у нас, до сих пор ведутся поиски новых путей преподавания физики. Эти поиски касаются разработки новых учебных планов, программ и особенно учебников и учебных пособий.
На кафедре физики №3 ЗФ ЮУрГУ в течение многих лет идет планомерная систематическая работа по созданию единого комплекса методических пособий. При создании комплекса учитывались время, предусмотренное на курс общей физики в учебных планах, созданные в филиале лабораторная и демонстрационная базы, а также уровень подготовки абитуриентов. Выпущенные ранее конспекты лекций, пособия по лабораторному практикуму, решению задач вошли в основу предлагаемого курса лекций.
В первой части курса изложена классическая механика, основы теории относительности и молекулярная физика. Изложение кинематики мало чем отличается от классического, приведенного во многих учебниках и учебных пособиях, за исключением попытки максимально упростить и уменьшить объем этого раздела так, как это сделано в курсе общей физики Л.Д. Ландау, А.И. Ахиезера и Е.М. Лифшица. То же можно сказать и о разделе, посвященном колебаниям и волнам, который включен в первую часть курса лекций, а не во вторую, как это часто стали делать в последнее время.
Раздел, посвященный динамике, ведется не совсем традиционно: в основу его положен второй закон Ньютона, а первый рассмотрен как его следствие. Уделено внимание понятию импульса и вытекающему из него реактивному движению. Показано, как формируются понятия силы, двух масс, и что лежит в основе понятия невесомости. По примеру широко известного Берклеевского курса физики авторы пытались заложить основы развития физического мышления и его развития в изложении последующих разделов физики.
Основы специальной теории относительности даны предельно кратко, так, что материал может быть прочитан за две - три лекции. Изложение далеко от того, которое дается в современных учебниках, приближено к первоначальному, взятому у Г.С. Ландсберга в "Оптике". Приведены выводы, которые делал сам А.Эйнштейн. Раздел содержит материал, необходимый для современного изложения магнетизма, расчета ядерных реакций, расчета современных ускорителей элементарных частиц.
Молекулярная физика изложена на основе понятий теории вероятностей, сделана попытка дать приемлемый (в рамках отведенного времени) вывод Максвелловского и Больцмановского распределений.
Анализ результатов сдачи студентами зачетов, ответов их на экзаменах, проводимый в течение многих лет, показал, что отобранный для курса лекций материал хорошо усваивается студентами при временных затратах даже меньше тех, что отведены им по учебному плану. Темы, далекие от специальных дисциплин, поля будущей специальности студенты слушали с большим вниманием и интересом. Все это послужило ощутимой поддержкой авторам в нелегкой работе над преллагаемым курсом лекций.
Содержание наиболее сложного для изложения раздела – теории относительности неоднократно и подробно обсуждалось с М.С. Свирским, профессором Челябинского педагогического университета.
Авторы с благодарностью отмечают деятельное участие в подготовке к изданию этого пособия студентов гр. НЗД-134, в особенности В. Тутанина и...Хурматуллина. Особую признательность авторы выражают зав. учебными лабораториями кафедры Л.В. Биглер, взявшей на себя труд по набору и техническому оформлению рукописи.
I. Введение
Физика – одна из основных естественных наук, изучающих законы неживой природы. Её курс делится обычно на несколько разделов, в каждом из которых изучаются различные виды материи и её движения. Простейший из этих разделов рассматривает механическое движение макроскопических тел. Законы этого движения описаны в первом разделе физики – в механике. Механику, в свою очередь, делят на кинематику, динамику, статику.
В кинематике движение описывается чисто внешне, без анализа причин, вызывающих его изменение. Основными понятиями кинематики являются перемещение, скорость, ускорение, то есть такие величины, которые помимо абсолютного значения должны быть охарактеризованы ещё и направлением. Поэтому, прежде чем перейти к изложению кинематики, повторим элементы векторной алгебры.
1.1. Понятие о векторах и простейших действиях над ними
Вектором называют любую физическую величину, имеющую не только числовое значение, но и направление. Двойная смысловая нагрузка вектора хорошо видна при такой записи векторной величины  :
:
 , ,
| (1.1) |
 характеризует абсолютное значение, а
характеризует абсолютное значение, а  – направление. Вектор называют единичным вектором, поскольку величина его равна единице.
– направление. Вектор называют единичным вектором, поскольку величина его равна единице.
Геометрически векторная величина изображается стрелкой, опять-таки несущей двойную смысловую нагрузку: длина стрелки определяет абсолютное значение векторной величины, а направление указывается стрелкой. Условимся обозначать любую векторную величину соответствующей буквой со стрелкой над ней, а модуль вектора – той же буквой без стрелки. Так, например,  – вектор скорости, а u – модуль скорости, то есть всегда величина положительная.
– вектор скорости, а u – модуль скорости, то есть всегда величина положительная.
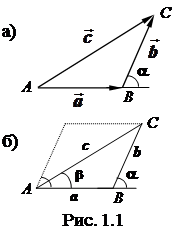 Действия над векторами введены из-за необходимости описывать наблюдаемые явления. Так, на рис.1.1 изображена задача, в которой из т. А в т. C можно пройти двумя путями: прямым (вектор
Действия над векторами введены из-за необходимости описывать наблюдаемые явления. Так, на рис.1.1 изображена задача, в которой из т. А в т. C можно пройти двумя путями: прямым (вектор  ) и через точку В. Во втором случае результат будет такой же, поэтому:
) и через точку В. Во втором случае результат будет такой же, поэтому:
 . .
| (1.2) |
 , то есть абсолютное значение пути АC можно найти, если известны длины отрезков АB и ВC, то есть зная a и b (модули соответствующих векторов). Задача нахождения c требует, вообще говоря, нового чертежа – рис.1.1б, где даны только длины отрезков. По теореме косинусов
, то есть абсолютное значение пути АC можно найти, если известны длины отрезков АB и ВC, то есть зная a и b (модули соответствующих векторов). Задача нахождения c требует, вообще говоря, нового чертежа – рис.1.1б, где даны только длины отрезков. По теореме косинусов
 , ,
| (1.3) |
и  .
.
Углом между двумя векторами называют угол, образованный этими векторами, проведенными из одной точки. На рис. 1.1а показан не угол между векторами, а равный ему. Если пользоваться правилом параллелограмма, то на чертеже можно указать непосредственно угол между векторами соответственно его определению (см. рис. 1.1б). В теореме косинусов (1.3) знак плюс появляется потому, что сторона с лежит против угла (180о– a).
Операция сложения векторов, как видим, требует для её выполнения двух уравнений. Уравнение (1.2) формально задаёт вектор-сумму, а уравнение (1.3) даёт возможность вычислить модуль суммы двух векторов. Заметим, что само по себе выражение (1.2) не задаёт направление вектора , а лишь определяет операцию. Это определение следует дополнить правилом сложения: сложить два вектора – значит построить второй вектор из конца первого и соединить стрелкой начало первого вектора с концом второго. Пунктиром на рис. 1.1б показано сложение по правилу параллелограмма, которое, очевидно, эквивалентно первому.
Этот же рисунок иллюстрирует и вычитание векторов: если результат – путь АС – известен, а пройден путь АВ, то остался путь ВС, значит:
 . .
| (1.4) |
 . .
| (1.5) |
 распадается на две: нахождение направления вектора по (1.4) и его модуля по (1.5).
распадается на две: нахождение направления вектора по (1.4) и его модуля по (1.5).
Здесь уместно заметить, что приращение D векторной величины – это вектор разности двух векторов. Так, скорость – векторная величина и ее изменение (приращение) будет тоже векторной величиной:
 . .
| (1.6) |
 записывается с символом модуля – | |. Не следует путать его с изменением длины вектора , обозначаемым через
записывается с символом модуля – | |. Не следует путать его с изменением длины вектора , обозначаемым через  . Нетрудно убедиться, что если векторы направлены в одну сторону и длина вектора
. Нетрудно убедиться, что если векторы направлены в одну сторону и длина вектора  больше длины вектора
больше длины вектора  , то приращение скорости совпадет с направлением скоростей. Если же скорость < , то приращение будет отрицательно, то есть направлено в сторону, противоположную движению.
, то приращение скорости совпадет с направлением скоростей. Если же скорость < , то приращение будет отрицательно, то есть направлено в сторону, противоположную движению.
Векторы можно перемножать двумя способами: скалярным и векторным.
Скалярное произведение двух векторов есть скаляр, величина которого равна произведению модулей перемножаемых векторов, умноженному на косинус угла между ними:
 . .
| (1.7) |
Результатом векторного умножения векторов будет вектор, направление которого находится по правилу: вектор векторного произведения двух векторов перпендикулярен плоскости, в которой лежат векторы-сомножители. Направление векторного произведения определяется поступательным движением буравчика, если головку вращать от первого сомножителя ко второму (рис. 1.2). Записывается векторное произведение так:
  . .
| (1.8) |
 , ,
| (1.9) |
В механике приходится иметь дело ещё и с двойным векторным произведением, но это правило будет дано в тексте соответствующей лекции.
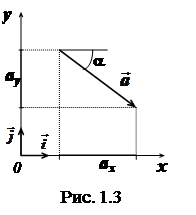
Кроме арифметических операций с векторными величинами часто бывает нужно находить проекции вектора на оси координат, или выражать вектор через его проекции. Рассмотрим двумерный случай, когда вектор лежит в плоскости XOY и составляет угол a с осью ОХ (рис. 1.3). Как следует из рисунка, угол вектора  с осью ОУ будет в этом случае равен (90о + a). Проекциями данного вектора на оси координат будут числа ax и ay, которые определяются величиной вектора и углом a. В данном случае (см. рис. 1.3)
с осью ОУ будет в этом случае равен (90о + a). Проекциями данного вектора на оси координат будут числа ax и ay, которые определяются величиной вектора и углом a. В данном случае (см. рис. 1.3)
| ax = acosa; ay = – asina. | (1.10) |
 Вектор через его проекции можно выразить как сумму векторов, полученных умножением проекций на соответствующие единичные векторы
Вектор через его проекции можно выразить как сумму векторов, полученных умножением проекций на соответствующие единичные векторы  и
и  , выполняющие роль введенного выше единичного вектора , и определяющие направления осей координат:
, выполняющие роль введенного выше единичного вектора , и определяющие направления осей координат:
 . .
| (1.11) |
 . .
| (1.12) |
Набор сведений из векторной алгебры, используемых в физике, этим кратким знакомством не заканчивается. Мы продолжим его во второй части.
Кинематика
Дата публикования: 2014-10-19; Прочитано: 756 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
