 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Основная система
|
|
При расчете методом перемещений система расчленяется на ряд однопролетных статически неопределимых балок. Это достигается введением в нее дополнительных связей.
Получаемая в результате этого система называется основной системой метода перемещений.
Приведем сравнение основных систем метода перемещений и метода сил.
Рассмотрим, например, прямоугольную раму, изображенную на рис. 6.5, а. Эта рама дважды статически неопределима. Проведя разрез по шарниру и удалив этим две связи, получим основную систему метода сил в виде двух балок (одной прямой и одной ломаной), заделанных одним концом (рис. 6.5, б). Эта система статически определима. Введя же в систему две дополнительные связи: одну, препятствующую повороту жесткого узла /, а другую, препятствующую линейным смещениям узлов 1 и 2, получим основную систему метода перемещений (рис. 6.6). Эта система четыре раза статически неопределима.
Таким образом:
1) основная система метода сил получается удалением связей, а основная система метода перемещений — введением связей;
2) переход от заданной системы к основной системе метода сил связан со снижением степени ее статической неопределимости, а переход к основной системе метода перемещений — с повышением степени статической неопределимости.

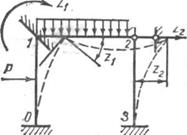
Рис.6.5. Рис.6.6
Здесь следует отметить, что введенные в основную систему метода перемещений защемляющие связи отличаются от обычного абсолютно жесткого защемления (заделки) тем, что оказывают препятствие лишь повороту узла и не лишают его линейной подвижности. Реакции таких связей представляют собой моменты, приложенные в узлах системы.
Что касается связей, уничтожающих линейные смещения, то введение таких связей можно осуществить различными путями.

Рис.6.7.
Например, можно поставить раскос 0 — 2 (рис. 6.7, а) или раскос 1 — 3 (рис. 6.7, б), или горизонтальный опорный стержень в узле 2 (рис. 6.7, б), или наклонный опорный стержень в узле 1 (рис. 6.7, г).
Связь в вйде раскоса 1—3 (рис. 6.7, б) не препятствует перемещению узла 3, который и без того неподвижен. Она исключает лишь перемещения узла 1 в направлении прямой, соединяющей этот узел с узлом 3. В этом отношении от нее ничем не отличается связь в виде опорного стержня, показанная на рис. 6.7, г.
При введении в сооружение дополнительных связей, исключающих линейные смещения узлов, предпочтение следует отдавать связям, соединяющим узлы с «землей», а не друг с другом, т. е. опорным стержням, а не дополнительным элементам сооружения. При наличии в раме горизонтальных и вертикальных стержней рекомендуется вводить горизонтальные и вертикальные (aijeнаклонные) опорные стержни; это упрощает расчет сооружения.
Основную систему метода перемещений, представляющую собой заданную систему с наложенными на нее связями, препятствующими повороту и смещению узлов, можно назвать кинематически определимой; общее же число неизвестных метода перемещений следует в таком случае называть степенью кинематической неопределимости заданной системы.
В статическом отношении основная система метода перемещений отличается от заданной тем, что в ней возможно появление реактивных моментов во введенных заделках и реактивных усилий в добавленных стержнях.
Для получения основной системы метода перемещений, во-первых, во все «жесткие» узлы заданной системы следует ввести заделки (защемления), препятствующие повороту узлов, и, во-вторых, ввести в заданную систему стержни, препятствующие линейным смещениям узлов.

Рис.6.8.
В качестве второго примера выбора основной системы метода перемещений рассмотрим раму, изображенную на рис. 6.8, а. Степень статической неопределимости этой системы равна шести. Число неизвестных при расчете ее методом перемещений также равно шести: четыре угловых и два линейных перемещения. Введя четыре заделки и два стержня, получим основную систему, изображенную на рис. 6.8, б.
Перейдем к детальному изучению элементов, из которых состоит основная система метода перемещений, т. е. к изучению однопролетной статически неопределимой балки.
Рассмотрим сначала построение методом сил эпюр изгибающих моментов в балке постоянной жесткости с одним защемленным, а другим шарнирно опертым концом (рис. 6.9, а) для нескольких характерных случаев внешнего воздействия; при этом условимся считать положительными реакции в виде сил, направленные вверх, и реактивные моменты, действующие по часовой стрелке. В качестве основной системы метода сил возьмем консольную (рис. 6.9, б) балку (с одним защемленным и другим свободным концом). Лишним неизвестным будет реакция подвижной опоры
При любом внешнем воздействии т значение Xiможно найти из уравнения
 (6.1)
(6.1)
Умножением эпюры Мх (рис. 6.9, в) на эпюру же Mi найдем величину бц, не зависящую от внешнего воздействия:
 .
.

Рис.6.9. Рис.6.10.
Рассмотрим различные случаи внешнего воздействия на эту балку.
1) Загружение равномерно распределенной нагрузкой q (рис. 6.10, а). Умножив эпюру Mq (рис. 6.10, б) на эпюру M1 (см. рис. 6.9, в), определим
 .
.
Решив уравнение (6.1), найдем
X1 = RB=3ql/8.
Реакция опоры А
RA=ql — RB=5ql/8.
Опорный момент в заделке А балки АВ получим, просуммировав момент в этом сечении от нагрузки с моментом от X1(рис. 6.10, в):
 .
.
2) Загружение сосредоточенной силой Р (рис. 6.11). Перемещение  получим, умножив эпюру Мр на эпюру M1:
получим, умножив эпюру Мр на эпюру M1:  .
.
Так как ul+vl = l и, следовательно, v=1 — и, то
 .
.
Решив уравнение (6.1), найдем реакцию опоры В:
 .
.
Реакция опоры А
 .
.
Опорный момент
 .
.
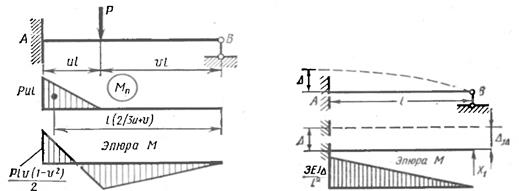
Рис.6.11. Рис.6.12.
Перемещение заделки на величину А по направлению, перпендикулярному оси стержня АВ (рис. 6.12). Эпюры изгибающих моментов в основной системе от смещения не будет, но перемещение по направлениюX1будет равно  .
.
Из уравнения (6.1) найдем
 .
.
Опорные реакции и опорный момент:
 ,
,
 ,
,
 .
.
4) Поворот заделки на угол ср (рис. 6.13). Перемещение по направлению Х1 от поворота заделки в основной системе
 .
.
Из уравнения (6.1) найдем
 .
.
Опорные реакции и опорный момент будут равны:
 ,
,
 ,
,
 .
.
5) Действие неравномерного нагрева (рис. 6.14). Обозначим разность температур верхнего и нижнего волокон
 .
.

Рис.6.13. Рис.6.14
Перемещение по направлению в основной системе будет равно:
 .
.

Рис.6.15
здесь h — высота поперечного сечения балки.
Решив уравнение (6.1), найдем
 .
.
Опорные реакции и опорный момент будут равны:
 ;
;  ;
;  .
.
Рассмотрим теперь балку с двумя защемленными (заделанными) концами (рис. 6.15, а); для расчета ее возьмем основную систему, полученную в результате проведения разреза посредине балки (рис. 6.15, б). На рис. 6.15, в—д даны единичные эпюры изгибающих моментов.
При действии вертикальной нагрузки, при линейных смещениях заделок (по нормали к оси балки) и при поворотах заделок продольная сила Х3 будет равна нулю потому, что в каноническом уравнении

коэффициенты  ,
,  и грузовой член
и грузовой член  равны нулю, так как равны нулю моменты М3 (рис. 6.15,5).
равны нулю, так как равны нулю моменты М3 (рис. 6.15,5).
Неизвестные X1 и Х2 найдем из уравнений
 (6.2)
(6.2)
Коэффициенты этих уравнений равны:
 ;
;  .
.
Рассмотрим некоторые случаи воздействия на такую балку.

Рис.6.16. Рис.6.17
Перемещение заделки на величину А по направлению, перпендикулярному оси стержня АВ (рис. 6.16). Перемещения в основной системе по направлениям неизвестных равны:
;  .
.
Решив уравнения (6.2), найдем
 ;
;  .
.
Опорные реакции и опорные моменты будут равны:
 ;
; 
 ;
;  .
.
Поворот заделки А на угол ф (рис. 6.17). При повороте заделки Л на угол <р в основной системе получим следующие перемещения по направлениям неизвестных:
 ;
;  .
.
Решив уравнения (6.2), найдем:
 ;
;  .
.
Опорные реакции и опорные моменты будут равны:
 ;
;  ;
;
 ;
;  .
.
Полученные результаты расчета балок на рассмотренные и на некоторые другие нагрузки приведены в табл. 6.2.
Эта таблица будет использоваться при расчете рам методом перемещений. Других воздействий на балку, защемленную двумя концами, здесь не рассматриваем.
Дата публикования: 2014-11-18; Прочитано: 1004 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
