 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Определение минимального радиуса кулачка
|
|
При проектировании кулачкового механизма очень важно правильно выбрать минимальный радиус кулачка r0min. Определение r 0min является одной из задач динамического синтеза кулачковых механизмов. Рассмотрим решение этой задачи применительно к конкретным схемам кулачковых механизмов.
1. Нецентральный кулачковый механизм с поступательно движущимся толкателем (рис. 8).
Заданы: угол γmin, эксцентриситет е, ω 1 и графики движения толкателя  ,
,  .
.
Величина угла передачи движения определяется по формуле

где Si – путь, пройденный толкателем при повороте кулачка из начального положения в данное, берется из графика ;
Vi – скорость толкателя в рассматриваемом положении, берется из графика V=V(t);
Smin – величина, определяющая крайнее (нижнее) положение толкателя.
Задача динамического синтеза в данном случае сводится к определению такого значения Smin, при котором в любом положении угол передачи  .
.
Если бы мы знали положение, в котором величина угла γi достигает наименьшего значения, то Smin можно было бы определить по формуле, вытекающей из формулы (3.1).

Но так как мы не знаем, в каком именно положении угол γ1 получается наименьшим, то в этом случае приходится определять значение правой части неравенства (3.1') для нескольких положений в пределах φу и наибольшее из них принимается равным Smin. После этого определяется

Эту задачу можно решить графическим способом [4]. Следует также обращать внимание на расположении линии толкателя относительно центра вращения кулачка: при вращении кулачка против часовой стрелки выгоднее располагать ее справа от центра вращения О, так как в этом случае получаются большие значения угла передачи γ при удалении при одной и той же величине r0 min, а следовательно, и более благоприятные динамические условия работы кулачкового механизма.
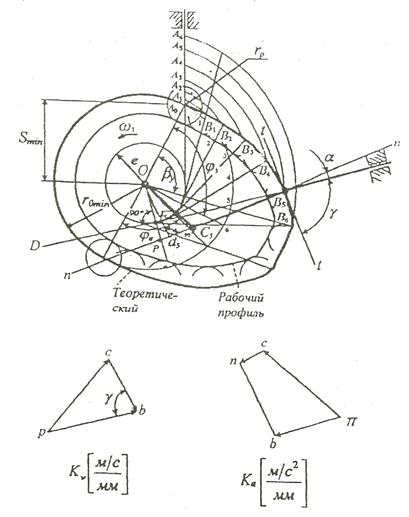
Рис. 8.
2. Коромысловый кулачковый механизм
Заданы: угол γmin, длина коромысла l AB, график движения толкателя S=S(t) и V=V(t), ω1, βmax.
Угол передачи движения в этом случае определяется по формуле

где ψ i – угол, составленный коромыслом в рассматриваемом положении с линией центров ОВ;
Vi – скорость т. А коромысла, взятая с графика ;
e – длина перпендикуляра, опущенного из т. O на направление скорости т. А; знак плюс или минус берется в зависимости от того, как расположен этот отрезок, справа или слева от центра О.
Задача динамического синтеза здесь сводится к определению начальных параметров кулачкового механизма: l OB, r0 min и угла ψ 0, который составляет коромысло в крайнем положении A0B0 с линией центра ОВ.
Проще всего эта задача решается графическим способом (рис. 9):
1. Изображаем коромысло AB в двух крайних положениях в масштабе K l.
2. Траекторию движения т. А коромысла делим на части в соответствии с диаграммой пути , получаем точки A 1, A2, A3…, соединив которые с точкой B, получаем мгновенные положения толкателя.
3. В каждом положении коромысла откладываем векторы  в том же масштабе K l. Для определения направления вектора
в том же масштабе K l. Для определения направления вектора  необходимо вектор скорости
необходимо вектор скорости  повернуть на 90˚ в направлении вращения кулачка.
повернуть на 90˚ в направлении вращения кулачка.
4. Из точек M i под углом γ min к данному положению коромысла проводим прямые M i C i. Заштрихованная область – область возможных центров вращения кулачка. Расстояние OA 0 будет равно r 0 min. Одновременно определяются расстояние lOB и угол ψ 0.

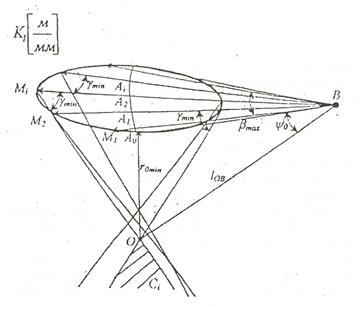
Рис. 9.
Дата публикования: 2014-11-04; Прочитано: 4369 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
