 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Принцип действия 3 страница
|
|
Сигнал от тумблера "КРЕН" пульта ПУ-46 при отключении поступает по двум цепям на клеммы "7" и "9" разъема Ш1 через контакты реле Р1 и Р2, которые кратковременно срабатывают при отключении тумблера "КРЕН". Далее сигнал через клеммы "7" и "9" разъема Ш17 платформы поступает через клеммы "34" и "35" верхнего разъема блока БУ-65 на сбросовые обмотки реле Р31 и Р32. Реле срабатывают и размыкают цепи контактов "2" и "3".
При поступлении сигналов отказа режима стабилизации релейные усилители У27 и У28 срабатывают и выдаст команду "+27 В" через клемму "20" первого верхнего разъема и клемму "31" верхнего разъема блока БУ-65 на сбросовые обмотки реле Р33 и Р32. Реле срабатывают и размыкают цепи контактов "2" и "3". Одновременно срабатывают реле Р72 в блоке БВК и через контакты "8" и "9" и клемму "22" первого верхнего разъема блока выдается сигнал на включение световой и звуковой сигнализации. При управлении штурвалом сигнал с концевика обжатия пружинного загружателя крена поступает через клемму "29" разъема Ш15 платформы на клемму "31" верхнего разъема блока БУ-65, на обмотки реле Р33 и Р32, которые отключаются.
Режим стабилизации курса работает следующим образом.
Пря отклонении самолета по курсу сигнал, пропорциональный углу курса, снимается с гироагрегата курсовой системы ТКС-П2 (сигнал снимается с сельсина-датчика переменного тока). Через клеммы "1", "2", "3" разъема Ш10 платформы и клеммы "6", "7", "8" верхнего и нижнего разъемов блока БСН поступает на блоки связи У1 и У2. С выхода блока связи У1 сигнал, пропорциональный отклонению от курса, который был в момент включения режима стабилизации, через регулировочный резистор ИЗ, контакт реле Р1 и клемму "10" верхнего разъема поступает в блоки БАЛ. Через клемму "8" нижнего разъема блока БАЛ, контакты реле Р14 и резистор К34 сигнал поступает на вычислитель автопилота бокового канала, с выхода которого сигнал поступает на усилитель привода. Рулевая машинка отклоняет элероны в сторону, необходимую для возвращения самолета к прежнему курсу. Самолет входит в крен, появляется сигнал крена с гировертикали, который поступает на вычислитель автопилота и компенсирует сигнал отклонения от курса, при этом на усилитель привода подается нулевой сигнал, элероны возвращаются в нуль и самолет с установившемся креном разворачивается на прежний курс. По мере подхода к прежнему курсу сигнал отклонения от курса уменьшается, элероны отклоняются в другую сторону, и самолет начинает выходить из крена, так что когда самолет выйдет на прежний курс, он будет лететь с нулевым креном.
При включении режима стабилизации сигнал автоматики подается через клеммы "12" верхнего и нижнего разъемов блока БСН-7, контакты реле Р3 (Р6) и РВ (Р9) на контакт "5" реле времени УЗ и У4. Реле времени запитывается через нормально замкнутый контакт рукоятки разворот через клемму "26" верхнего и нижнего разъемов блока и срабатывают через 8 с после включения питания. Когда на клемму "5" подается команда стабилизации, то с клеммы "4" подается команда на реле Р5 (Р2), реле срабатывают и своими контактами подают команду "+27 В" на включение реле Р14 в блоках БАП через клеммы "16", "18", "19" нижнего разъема блока БСН-7. Одновременно этот сигнал поступает на клемму "7" блоков связи У1 и У2. Блоки связи из режима слежения за текущим курсом переводятся в режим стабилизации. Следящая система затормаживается и при отклонении самолета по курсу выдает сигнал отклонения от курса, который был в момент включения стабилизации.
Контроль режима курса осуществляется системой встроенного контроля. Сигнал с выхода блоков связи У1 и У2 через клеммы "10" верхнего и нижнего разъемов, клеммы "5" и "6" второго нижнего разъема блока БВК поступает на сигнализатор напряжения У56. Сигнализатор напряжения сравнивает выход обоих блоков и при условии их идентичности выдает сигнал исправности. Через клемму "16" второго нижнего разъема блока БВК, клеммы "13" верхнего и нижнего разъемов блока БСН сигнал поступает на реле Р3 и Р6. Контакты реле Р3 и Р6 замыкаются и позволяют включить реле Р5 и Р2 при включении режима стабилизации. Если сигналы блоков У1 и У2 разные, то сигнализатор напряжения снимает сигнал исправности, обмотки реле Р3 и Р6 обесточиваются, контакты их размыкаются и при включении режима стабилизации реле Р2 и Р5 не включаются.
Режим управления от рукоятки "РАЗВОРОТ" осуществляется следующим образом.
При отклонении рукоятки "РАЗВОРОТ" сигнал с потенциометров через клеммы "34", "36", "38" разъема Ш1 пульта ПУ-46, клеммы "34", "36", "38" разъема Ш17 платформы, клеммы "11" нижнего разъема блоков БАП, контакты реле Р16, регулировочное сопротивление R37 и постоянные резисторы R70 и R38 поступают на вычислитель автопилота. Потенциометр рукоятки "РАЗВОРОТ" запитывается от блока питания У10 (У11, У12), расположенного в блоке БШУ, через клеммы "8" и "9" ("18" и "19"; "28" и "29) верхнего разъема блока БШУ, клеммы "35" и "44" ("37" и "43"; "39" и "42") разъема Ш17 платформы и клеммы "35" и "44" ("37" и "43"; "39" и "42") разъема Ш1 пульта управления ПУ-46. С выхода вычислителя сигнал поступает на усилитель привода, и шток рулевой машинки отклоняет элероны в сторону, необходимую для совершения заданного разворота. При этом в блоке БСН снимается сигнал "+27 В" с контакта "26" верхнего и нижнего разъемов блока и обесточивается реле времени УЗ и У4, отключаются реле Р2, Р5 и реле Р14 в блоке БАЛ, которое отключает от вычислителя автопилота У6 сигнал отклонения от курса.
Самолет входит в крен, появляется сигнал крена, который поступает с гировертикали на вычислитель автопилота и компенсирует сигнал с рукоятки "РАЗВОРОТ". Элероны возвращаются в нуль и самолет с установившимся креном начинает разворачиваться.
Когда рукоятка "РАЗВОРОТ" устанавливается в нулевое положение, элероны отклоняются в противоположном направлении и самолет начинает выходить из крена, прекращая разворот. При этом подается команда "+27 В" на реле времени УЗ и У4, которые срабатывают через 8 с и подключают сигнал отклонения от курса к вычислителю автопилота. При выходе самолета из крена включается режим стабилизации курса.
Режим стабилизации и управления заданным курсом осуществляется следующим образом.
При отклонении от заданного курса с прибора ПНП (левого или правого в зависимости от положения переключателя "ВВОД ЗК" на приборной доске пилотов) сигнал отклонения от заданного курса по переменному току поступает на клеммы "15" и "16" разъема Ш9 платформы. Далее этот сигнал поступает через клеммы "14", "15" верхнего и нижнего разъемов блока БСН на вычислители заданного курса. Вычислители заданного курса состоят из преобразователя фазы У5 (У6) и усилителя У7 (У8). Один вычислитель (У5 и У7) служит для формирования сигнала управления, второй вычислитель (У6 и У8) служит для контроля. Сигнал постоянного тока с выхода преобразователя У5 через регулировочное сопротивление R19 и резистор R17 поступает на вход усилителя У7. С выхода усилителя сигнал через контакт реле Р1, клемму "10" верхнего разъема, клемму "8" нижнего разъема БАП, реле Р14 и резистор R34 поступает на вход вычислителя автопилота. С выхода вычислителя автопилота сигнал поступает на усилитель привода, рулевая машинка отклоняет элероны в сторону, необходимую для возвращения самолета к прежнему заданному курсу. Самолет входят в крен, появляющийся сигнал крена поступает на вычислитель автопилота, и компенсирует сигнал заданного курса. Элероны возвращаются в нуль, и самолет с установившимся креном возвращается к прежнему заданному курсу. По мере подхода к нему сигнал рассогласования по курсу уменьшается, и элероны отклоняются в другую сторону. Самолет начинает выходить из крена, так что при выходе на заданный курс крен самолета нулевой.
Летчик может управлять заданным креном, вводя кремальерой ЗК на приборе ПНП новое значение курса. При этом работа системы не отличается от ранее описанной по сигналу заданного курса.
Сигнал с вычислителя заданного курса в блоке БСН ограничен по величине микросхемами У29 и У30. Эта величина определяет установившийся крен при управлении, который равен 22±3°.
Режим ЗК включается из режима стабилизации курса нажатием кнопки "ЗК" на приставке ПН-5. При этом через клеммы "11" верхнего и нижнего разъемов блока БСН подается команда на реле Р1 и Р10 (Р4 и Р11), которые срабатывают и подключают сигнал вычислителя заданного курса к вычислителю автопилота и одновременно отключают сигнал стабилизации курса, а также снимает с клеммы "7" блоков связи сигнал "+27 В" и переводят в режим слежения за текущим курсом. Через клеммы "27" и "28" выдается сигнал на включение табло "РЕЖИМ ЗК" на приборной доске летчика.
Контроль режима осуществляется так же, как и контроль режима курса сигнализатором напряжения У56, сравнивающим сигналы на выходе вычислителей заданного курса. Если их сигналы отличаются, то снимается сигнал исправности и режим отключается, самолет переходит на режим стабилизации нулевого крена.
В. Режим "Автоматический полет по сигналам НВУ"
Система автоматического управления в режиме "Автоматический полет по сигналам НВУ" обеспечивает отклонение элеронов, а значит и управление самолетом в боковой плоскости по сигналам, поступающим из НВУ-БЗ. Одновременно САУ-154-2 обеспечивает демпфирование колебаний самолета по курсу и крену. Структурная схема канала крена в этом режиме показана на рис. 12.

Рис.12. Структурная схема канала крена в режимах автоматического управления по сигналам VOR и НВУ
В режиме НВУ управляющий сигнал  формируется суммированием двух сигналов, выдаваемых навигационным вычислителем:
формируется суммированием двух сигналов, выдаваемых навигационным вычислителем:
-  (м) бокового отклонения самолета от заданной линии пути (ЗЛП);
(м) бокового отклонения самолета от заданной линии пути (ЗЛП);
-  (м/с) составляющей скорости самолета на ось .
(м/с) составляющей скорости самолета на ось .
Сигнал вначале ограничивается ( ), а затем усиливается (
), а затем усиливается ( ). Сигнал также вначале ограничивается (
). Сигнал также вначале ограничивается ( ), а затем усиливается (
), а затем усиливается ( ). Суммарный управляющий сигнал ограничивается (
). Суммарный управляющий сигнал ограничивается ( ) и пропускается через фильтр с постоянной времени
) и пропускается через фильтр с постоянной времени  .
.
Выбор коэффициентов усиления и производился из условий обеспечения необходимого качества переходного процесса при экспоненциальном устранении начального смещения.
При включении режима НВУ реле Р1 и Р2 (см. рис. 13) срабатывают и замыкают свои контакты. Управляющий сигнал  поступающий на усилитель сервопривода, формируется в БНС-1-2.
поступающий на усилитель сервопривода, формируется в БНС-1-2.
Сигналы, пропорциональные боковому отклонению () и скорости изменения бокового отклонения (), поступают из НВУ-Б3 на вход УПТ-9, расположенного в навигационном вычислителе ВН-3 блока БНС-1-2. С выхода усилителя суммарный усиленный сигнал поступает на вход магнитного усилителя, который служит для гальванической развязки сигналов НВУ-БЗ и сигналов вычислителей САУ-154-2. С выхода магнитного усилителя сигнал поступает одновременно на три УПТ-9, расположенных в БСА-2 блока БНС-1-2. На этих усилителях производится суммирование его с сигналом у с МГВ-1СК и усиление по величине и мощности. Далее осредненный на КЭ сигнал поступает на усилители сервопривода, которые посылают управляющий сигнал на РА-56В1. Выходное звено РА-56В1 перемещается, заставляя отклоняться элероны. В результате этого самолет входит в крен и начинает разворачиваться в сторону заданной траектории. Крен самолета будет увеличиваться до тех пор, пока не скомпенсируется сигналом  , поступавшим от МГВ-1СК, при этом самолет войдет в координированный разворот в сторону заданной траектории. Сигнал начнет уменьшаться, а - расти, причем знаки у них будут разными. Когда эти сигналы становятся равными, самолет выходит из крена и приближается к заданной траектории в прямолинейном полете. В дальнейшем становится больше чем , и самолет входит в противоположный крен, обеспечивая плавный выход самолета на заданную траекторию. Когда самолет возвратится на заданную траекторию, сигналы и будут равны нулю и САУ-154-2 выведет самолет в прямолинейный полет.
, поступавшим от МГВ-1СК, при этом самолет войдет в координированный разворот в сторону заданной траектории. Сигнал начнет уменьшаться, а - расти, причем знаки у них будут разными. Когда эти сигналы становятся равными, самолет выходит из крена и приближается к заданной траектории в прямолинейном полете. В дальнейшем становится больше чем , и самолет входит в противоположный крен, обеспечивая плавный выход самолета на заданную траекторию. Когда самолет возвратится на заданную траекторию, сигналы и будут равны нулю и САУ-154-2 выведет самолет в прямолинейный полет.

Рис.13. Функциональная схема канала крена в режиме «Автоматический полет по сигналам НВУ»
Рассмотрим работы канала крена в режиме НВУ по принципиальным электрическим схемам.
В режиме НВУ АБСУ состоит из блока навигации и сигнализации БНС-1-2 и элементов САУ-154-2, обеспечивающих автоматический полет и демпфирование колебаний по крену и курсу.
Сигнал управления формируется вычислителем ВН-3 блока БНС-1-2 и подается на сервопривод автопилота. При формировании управляющего сигнала АБСУ в режиме НВУ используются следующие сигналы:
- сигнал бокового отклонения () от заданной траектории, поступающий в платформу ПС-12 блока БНС-1-2 (Ш1 клеммы "34", "35") на ВН-3 (Ш1 клемма "24") из навигационного вычислительного устройства НВУ-БЗ;
- сигнал, пропорциональный скорости бокового отклонения (), поступающий в ПС-12 блока БНС-1-2 (Ш1 клеммы "32", "33") на ВН-3 (Ш1 клемма "21"), на НВУ-БЗ;
- сигнал текущего крена, поступающий в платформу ПС-12 блока БНС-1-2 (Ш3 клеммы "13", "14", "15") из блока КГ-7 после кворум-элемента, воспринимающего три сигнала текущего крена с МГВ-1СК.
Сформированный в ВН-3 сигнал заданного крена (), аналогично описанному в режиме VOR, поступает в БСА-2, где суммируется с сигналом  из МГВ-1СК. Полученный сигнал осредняется на кворум-элементе и подается на усилители сервопривода, которые после усиления передают управляющий сигнал на рулевой агрегат РА-56В1.
из МГВ-1СК. Полученный сигнал осредняется на кворум-элементе и подается на усилители сервопривода, которые после усиления передают управляющий сигнал на рулевой агрегат РА-56В1.
Включение режима НВУ производится летчиком. На пульте управления ПУ-46 включается кнопка "СТАБ.", на приставке навигационной ПН-5 включается тумблер "ПОДГОТ. НАВ." и нажимается кнопка-табло "НВУ". При этом в ПС-12 блока БНС-1-2 поступают с ПН-5 команда "Ком. вкл. нав." (Ш3 клемма "32") и с БКН-5 №1 команда., "НВ лев." (Ш1 клемма "24"), по которым в БИС-2 при наличии команды "Испр. МГВ " формируется сигнал "Гот. нав." и аналогично режиму VOR используется для подключения управляющего сигнала к входу сервопривода.
Г. Режим «Автоматический полет по сигналам VOR”
Структурная схема канала крена в режиме VOR показана на рис. 12. В режиме VOR (всенаправленного радиомаяка) управляющий сигнал формируется суммированием трех сигналов:
- разности между углами курса ( ), выдаваемыми точной курсовой системой (ТКС) и заданным на плановом навигационном приборе (ПНП) углом курса (
), выдаваемыми точной курсовой системой (ТКС) и заданным на плановом навигационном приборе (ПНП) углом курса ( ).
).
- путевого угла скольжения ( °), выдаваемого допплеровским измерителем (ДИСС);
°), выдаваемого допплеровским измерителем (ДИСС);
- угла рассогласования между направлением на маяк VOR и направлением заданной линии пути (ЗЛП), выдаваемого навигационно-посадочной аппаратурой "Курс-МП-2", предназначенной для обеспечения полета по сигналам всенаправленных радиомаяков международной системы ближней навигации VOR.
Перед суммированием сигналы:  - усиливается коэффициентом усиления
- усиливается коэффициентом усиления  ;
;  пропускается через фильтр с постоянной времени
пропускается через фильтр с постоянной времени  и усиливается коэффициентом усиления
и усиливается коэффициентом усиления  ;
;  - пропускается через фильтр с постоянной времени Т и усиливается коэффициентом усиления
- пропускается через фильтр с постоянной времени Т и усиливается коэффициентом усиления  , затем сигнал ограничивается (
, затем сигнал ограничивается ( ).
).
После суммирования полученный управляющий сигнал ограничивается () и пропускается через фильтр с постоянной времени Т. Коэффициенты , и выбирались из условий монотонного процесса входа самолета в равносигнальную зону радиомаяка.
Как и в режиме "Автоматический полет по сигналам НВУ" при включении режима "Автоматический полет по сигналам VOR" (см. рис. 14) включаются реле Р1 и Р2. Формирование управляющего сигнала  , поступающего на усилитель сервопривода, осуществляется в блоке БНС-1-2.
, поступающего на усилитель сервопривода, осуществляется в блоке БНС-1-2.
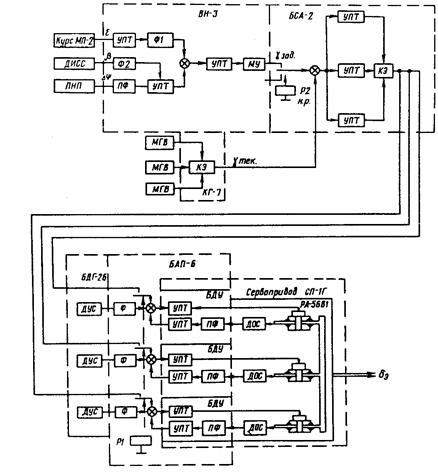
Рис.14. Функциональная схема канала крена в режиме «Автоматический полет по сигналам VOR»
Сигнал поступает из системы "Курс-МП-2", работающей в режиме VOR, в виде постоянного тока на входе усилителя постоянного тока (УПТ-12, УПТ-9). В этом тракте сигнал усиливается по величине и далее с его выхода сигнал через фильтр Ф1 поступает на вход суммирующего УПТ-9. Фильтр Ф1 представляет пассивную RС-ячейку с передаточной функцией реального дифференцирующего звена.
На другой вход суммирующего УПТ-9 поступает сигнал угла сноса  , вырабатываемый допплеровским измерителем скорости ДИСС-ЗП. Этот сигнал проходит через фильтр Ф2, представляющий RС-ячейку с передаточной функцией инерционного звена.
, вырабатываемый допплеровским измерителем скорости ДИСС-ЗП. Этот сигнал проходит через фильтр Ф2, представляющий RС-ячейку с передаточной функцией инерционного звена.
На третий вход суммирующего УПТ-9 поступает сигнал отклонения от заданного путевого угла со следящей системы прибора ПНП-1. Этот сигнал вырабатывается в ПНП-1 в виде напряжения переменного тока и далее поступает на фазочувствительный выпрямитель, состоящий из фазочувствительного преобразователя ПФ и усилителя УПТ-9. Все три сигнала алгебраически суммируются на входе УПТ-9, где общий сигнал усиливается и поступает на вход магнитного усилителя. В дальнейшем сигнал проходит так же, как и сигнал в режиме "Автоматический полет по сигналам НВУ". "Автоматический полет по сигналам VOR происходит сведущим образом: при включении режима сигнал определяется сигналом  , учитывающим отклонение самолета от заданного азимута с учетом угла сноса, так как в этот момент значительно меньше этой суммы. Под действием сигнала самолет входит в координированный разворот в сторону заданной линии пути.
, учитывающим отклонение самолета от заданного азимута с учетом угла сноса, так как в этот момент значительно меньше этой суммы. Под действием сигнала самолет входит в координированный разворот в сторону заданной линии пути.
В процессе разворота сигнал уменьшается и становится соизмеримым с сигналом . Сигналы и имеют противоположные знаки, сигнал уменьшается, и самолет постепенно выходит из крена. Когда сигнал становится равным ,  самолет переходит в прямолинейный полет с постоянным значением курса. При подходе самолета к заданной линии пути сигнал уменьшается, при этом сигнал вновь становится больше текущего значения , и самолет снова входит в координированный разворот в сторону заданной линии пути. При выходе на заданную линию пути сигналы и уменьшается, самолет выходит из крена и продолжает прямолинейный полет по заданной линии пути.
самолет переходит в прямолинейный полет с постоянным значением курса. При подходе самолета к заданной линии пути сигнал уменьшается, при этом сигнал вновь становится больше текущего значения , и самолет снова входит в координированный разворот в сторону заданной линии пути. При выходе на заданную линию пути сигналы и уменьшается, самолет выходит из крена и продолжает прямолинейный полет по заданной линии пути.
Рассмотрим работу канала крена в режиме VOR по принципиальным электрическим схемам.
Канал крена АБСУ в режиме VOR состоит из блока навигации и сигнализации БНС-1-2 и элементов САУ-154-2, обеспечивающих автоматический полет и демпфирование колебаний по крену и курсу.
Сигнал управления формируется вычислителем ВН-3 блока БНС-1-2 и подается на сервопривод автопилота.
В формировании управляющего сигнала используются следующие сигналы:
- сигнал отклонения от заданного азимута, поступающий в платформу ПС-12 БНС-1-2 (Ш1 клеммы "36", "37") на ВН-3 (Ш1 клемма "18") из системы "Курс-МП-2";
- сигнал угла сноса, поступающий в платформу ПС-12 БНС-1-2 (Ш4 клеммы "38", "39") на ВН-3 (Ш1 клемма "15") от допплеровского измерителя скорости ДИСС-ЗП;
- сигнал отклонения текущего курса от заданного, формируемый в ПНП-1. Из коробки КС-2 (Ш11 клеммы "44", "45") сигнал отклонения по курсу поступает в платформу ПС-12 БНС-1-2 (Ш7 клеммы "44", "45") и далее на ВН-3 (Ш1 клемма "22");
- сигнал, текущего крена, поступающий в платформу ПС-12 блока БНС-1-2 (Ш3 клеммы "13" "14", "15") из блока КГ-7 после кворум-элемента, воспринимающего три сигнала текущего крена от МГВ-1СК. Сигнал заданного крена () из ВН-3 (Ш1 клемма "32") поступает в блок БСА-2 (Ш1 клеммы "4", "12", "18") и через резистор R3 подается на вход усилителя У2, где алгебраически суммируется с сигналом текущего крена (Ш1 клеммы "б", "42", "41"), который через резистор R7 также поступает на вход У2. Сигнал с выхода У2 осредняется на кворум-элементе и из блока БНС-1-2 (Ш1 клеммы "8", "14", "24") через ПС-12 (Ш2 клеммы "27", "28", "29") направляется в ПКА-31 (Ш9 клеммы "1", "2", "З") и далее в БАП-6 (ШН клемма "14") на усилители сервопривода, которые посылают управляющий сигнал на рулевой агрегат РА-56В1.
Включение режима VOR производится летчиком. На пульте управления ПУ-46 включается кнопка "СТАБ.", на навигационной приставке ПН-5 включается тумблер "ПОДГОТ. НАВ." и кратковременно нажимается кнопка-табло "АЗ1" (если первый полукомплект "Курс-МП-2" настроен на частоту радиомаяка VOR). При этом в ПС-12 блока БНС-1-2 поступают с ПН-5 команда "Ком. вкл. нав." (ШЗ клемма "32") и с БКН-5 № 1 команда "VOR лев." (Ш1 клемма "25"), по которым в БИС-2 в случае наличия команд "Исправн. МГВ ", "Гот. ТКС" и "Вкл. ДИСС" формируется сигнал "Готовн. нав." (Шв клемма "40" и Шн клемма "40"). Сигнал "Гот. нав." с платформы ПС-12 (Ш2 клемма "11") через ПКА-31 (Ш9 клемма "7") выдается в блок БУ-65 (Шв клемма "23"), в котором формируется команда "Вкл. СТУ бок." (Шв клемма "8"). Эта команда приходит в БАП-6 (Шн/32) и включает реле Р17, которое своими контактами подключает сигнал управления из БСА к входу сервопривода.
Д. Режим "Заход на посадку"
Структурная схема канала крена в режиме "Заход на посадку" показана на рис. 15.
Вычислитель захода на посадку в боковой плоскости предназначен для формирования командного сигнала управления в режимах автоматического и директорного заходов на посадку, используя сигнал , поступающий с ПНП, и сигнал отклонения от зоны курса  , поступающий с "Курс-МП-2".
, поступающий с "Курс-МП-2".
Автоматический (директорный) заход на посадку может начинаться как с прямой ( ), так и с маневра типа "коробочка". В последнем случае производится автоматический четвертый разворот и вписывание на курсовую линию. Чтобы обеспечить высокую скорость разворота с плавным подходом к курсовой линии, в вычислитель вводится сигнал отклонения самолета от курса ВПП (
), так и с маневра типа "коробочка". В последнем случае производится автоматический четвертый разворот и вписывание на курсовую линию. Чтобы обеспечить высокую скорость разворота с плавным подходом к курсовой линии, в вычислитель вводится сигнал отклонения самолета от курса ВПП ( ) пропущенный через нелинейное звено типа "зона нечувствительности". Это звено реализуется в структурной схеме на элементах
) пропущенный через нелинейное звено типа "зона нечувствительности". Это звено реализуется в структурной схеме на элементах  ,
,  и
и  .
.
Дата публикования: 2015-11-01; Прочитано: 1410 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
