 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Принцип действия 1 страница
|
|
СИСТЕМА
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
САУ-154-2
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ
И ТЕХНИЧЕСКОМУ ОБСЛУЖИВАНИЮ
(ЭЛЕКТРОННАЯ ВЕРСИЯ)
Под редакцией С.В.Кузнецова
Ноябрь 2001г.
2. УСТРОЙСТВО И РАБОТА СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САУ 154-2 И БЛОКА БНС-1-2
НАЗНАЧЕНИЕ И СОСТАВ
Система автоматического управления САУ-154-2 (см. рис. 3) обеспечивает:
(а) Улучшение характеристик устойчивости и управляемости самолета во всем диапазоне эксплуатационных скоростей и высот полета при ручном пилотировании.
(б) Стабилизацию углового положения самолета относительно трех основных осей.
(в) Стабилизацию барометрической высоты полета.
(г) Стабилизацию приборной скорости полета.
(д) Стабилизацию числа М.
(е) Выполнение координированных разворотов с углами крена до ±26±3°.
(ж) Выполнение координированных разворотов на заданный угол курса.
(з) Набор высоты и снижение с углами тангажа до ±17±2,5°.
Система САУ-154-2 с блоком БНС-1-2 обеспечивают:
(а) Управление самолетом в боковой плоскости в режимах полета по радиомаякам VOR и в режиме автоматического управления по сигналам НВУ-БЗ.
(б) Управление самолетом в боковой и продольной плоскостях в режиме автоматического захода на посадку по сигналам системы траекторного управления.
(в) Управление самолетом в режиме автоматического ухода на второй круг по сигналам вычислителя ухода.
Состав САУ-154-2 приведен в разделе 1.3.1.
ПРИНЦИП ДЕЙСТВИЯ
Система автоматического управления осуществляет автоматическое управление самолетом с помощью элеронов, рулей направления и высоты, а также обеспечивает улучшение характеристик устойчивости и управляемости при ручном пилотировании самолета.
Для управления самолетом используются сигналы от датчиков, измерявших основные параметры полета (курс, крен, тангаж, высоту, скорость и т.д.), а также сигналы от рукоятки управления на пульте ПУ-46. Эти сигналы обрабатываются в вычислительных и усилительных блоках САУ-154-2 и в виде управляющих сигналов поступают на рулевые агрегаты элеронов и рулей.
Управление самолетом производится по каналам курса, крена и тангажа. Каналы работают автономно, связь между ними осуществляется только через самолет во время его эволюции. Каждый канал состоит из трех идентичных подканалов, которые работают одновременно. Это обеспечивает сохранение полной работоспособности после возникновения первого отказа в любом канале и позволяет избежать значительных и резких перемещений рулей при втором отказе.

Рис.3. Внешний вид системы автоматического управления САУ-154-2
Исполнительным механизмом каждого канала является строенный электрогидравлический рулевой агрегат РА-56В1, который совместно с блоками демодуляции и усиления БДУ образует сервопривод канала. Подканалы сервопривода имеют автономное электропитание, а каждый цилиндр РА-56В1 подключен к автономной гидросистеме самолета.
Все три подканала сервопривода работают одновременно. Штоки трех цилиндров кинематически соединены с выходным звеном РА-56В1. Рулевые агрегаты включены в проводку управления самолета дифференциально, т.е. перемещение выходного звена необратимых бустеров, перемещающих рули, равно сумме двух независимых перемещений: от рычагов управления (X) и от траверс РА-56В1 ( ).
).
Управление элеронами и рулями осуществляется необратимыми бустерами. Для создания "чувства управления" у летчика в проводке управления самолета установлены пружинные загружатели.
Пружинные загружатели, благодаря предварительному поджатию, не позволяют передавать движение траверс на рычаги управления (штурвал, колонку штурвала и педали). Так как каналы СДУ-154-2 работают автономно, ниже приводится описание каналов курса, крена и тангажа. Схемы блоков приведены в кн. 2, ч. I.
РЕЖИМЫ РАБОТЫ
Канал курса
Канал курса работает во всех режимах АБСУ-154-2.
Канал курса представляет собой демпфер рыскания, т.е. демпфирует колебания самолета в полете относительно вертикальной оси.
Структурная схема канала курса во всех режимах показана на рис. 4.

Рис.4. Структурная схема канала курса во всех режимах
В канале курса сервопривод АБСУ-154-2 отклоняет руль направления пропорционально угловой скорости  , скорректированной фильтром типа
, скорректированной фильтром типа  .
.
Отклонение руля направления  от сервопривода ограничено
от сервопривода ограничено  .
.
Сигнал снимается с потенциометров блока демпфирующих гироскопов БДГ.
В режиме автоматического захода на посадку по команде "Глисс. авт." включается дополнительное демпфирование с передаточным коэффициентом  .
.
Канал курса САУ-154-2 (см. рис. 5) состоит из сервопривода СП-1Г и датчиков угловой скорости ДУС, размещенных в блоке демпфирующих гироскопов БДГ-26.
Сервопривод образует три параллельно работающих контура с жесткой обратной связью. Перемещение штока каждого подканала пропорционально величине управляющего сигнала. Управляющий сигнал в каждом подканале представляет собой электрический сигнал, выдаваемый БДГ-26 канала курса, который измеряет угловую скорость, возникающую при колебаниях самолета вокруг вертикальной оси. Этот сигнал поступает на кворум-элемент (КЭ), расположенный в блоке БСН-7. Кворум-элемент позволяет получить достоверный сигнал угловой скорости курса при отказе одного ДУС блока БДГ-26.
При нормальной работе всех ДУС сигнал на выходе КЭ представляет собой среднеарифметическое значение сигнала угловой скорости курса, поступающего на него с ДУС. Далее управляющий сигнал поступает на фильтр, расположенный в каждом блоке БАП-6, который представляет собой пассивную RС-ячейку с передаточной функцией реального дифференцирующего звена. Введение фильтра исключает прохождение постоянной составляющей угловой скорости разворота в контур привода.
Таким образом, демпфирование колебаний самолета осуществляется сигналом, пропорциональным угловому ускорению рыскания.
Управляющий сигнал поступает на усилитель сервопривода БДУ для усиления по величине и мощности.
На входе усилителя сервопривода управляющий сигнал алгебраически суммируется с сигналом отрицательной жесткой обратной связи. Сигнал ошибки, являющийся разностью этих двух сигналов, усиливается по величине и мощности и далее с выхода усилителя поступает в обмотку преобразователя сигналов (ПС) РА-56В1. Преобразователь сигналов, перемещая золотник, перераспределяет давление гидросистемы в полостях гидроцилиндра, вызывая тем самым перемещение поршня агрегата управления. Скорость перемещения поршня пропорциональна величине тока в обмотке ПС. Перемещение поршня прекратится, когда сигнал ошибки на входе усилителя сервопривода будет равен нулю. Перемещение трех поршней и связанных с ним штоков агрегатов управления передается на выходной элемент РА-56В1.

Рис.5. Функциональная схема канала курса
Угол отклонения руля направления от РА-56В1 соответствует средневыборочному значение трех управляющих сигналов, поступающих в подканалы сервопривода.
Руль направления перемещается таким образом, чтобы погасить колебания самолета по курсу.
В режиме "Заход" после захвата глиссады на усилитель сервопривода подключается сигнал  . При этом обеспечивается дополнительное демпфирование колебаний самолета по курсу.
. При этом обеспечивается дополнительное демпфирование колебаний самолета по курсу.
При возникновении неисправности в одном из подканалов перемещение штока цилиндра этого подканала будет отличаться от перемещения траверсы РА-56В1. Это позволяет определить и отключить неисправный подканал. При этом канал курса в целом остается полностью работоспособным (первый отказ).
В случае возникновения неисправности во II-ом подканале неисправность определяется как расхождение перемещений штоков РА-56В1 оставшихся подканалов относительно друг друга. В этом случае канал курса считается отказавшим и отключается из управления.
Рассмотрим работу канала курса по принципиальным электрическим схемам.
АБСУ в канале курса в режиме штурвального управления обеспечивает демпфирование колебаний самолета вокруг вертикальной оси У. Канал курса АБСУ состоит из демпфера курса, в который входят блок демпфирующих гироскопов БДГ-26 и сервопривод СП1-Г руля направления.
Сервопривод состоит из блока демодуляции и усиления (усилитель привода) БДУ, расположенного в блоке БАП, и гидравлического рулевого агрегата РА-56В1, установленного в проводке управления рулем направления.
Сигнал, пропорциональный угловой скорости и снимаемый со щетки потенциометра датчика угловой скорости ДУС, расположенного в блоке БДГ-26 (курса) относительно средней точки через клемму "6" ("16", "26"), поступает на клемму "6" ("16", "26") разъема ШЗ платформы ПКА-31. Питание ±12,5 В поступает на потенциометр ДУС с блока питания БПН У10 (У11, У12), расположенного в блоке БШУ-4, через клеммы "8", "9" ("18", "19"; "28", "29") верхнего разъема блока, клеммы "1", "2" ("11", "12"; "21", "22") разъема Ш3 платформы ПКА-31 и клеммы "1", "2" ("11", "12"; "21", "22") разъема блока БДГ. Блоки питания через клеммы "1", "3" запитаны переменным напряжением 36 В 400 Гц. С разъема Ш3 сигнал угловой скорости поступает через клемму "38" ("39", "40") нижнего разъема блока БСН-7 на сигнализатор напряжения У18 (У19, У20) клемм "13", "14". С клеммы "16" У18 сигнал поступает на клейму "1" ограничителя тока У25 (У26, У27). Ограничители тока У25, У26, У27 образуют кворум-элемент, который осредняет электрический сигнал и совместно с сигнализаторами напряжения У18, У19, У20 позволяет контролировать исправность (достоверность) этого сигнала в каждом подканале. Выходные клеммы "2" ограничителей тока объединены между собой, соединены с клеммой "12" сигнализаторов напряжения и выведены на клеммы "41", "56", "57" нижнего разъема блока.
С клеммы "41" ("56", "57") нижнего разъема блока БСН-7 осредненный сигнал угловой скорости и поступает в блок БАП на клемму "28" нижнего разъема. В блоке сигнал поступает на регулировочное сопротивление R57 и далее на изодромный фильтр С5 - С9, с выхода которого сигнал поступает на вход усилителя привода У11. При наличии угловой скорости с усилителя привода сигнал постоянного тока поступает на преобразователь сигналов ПС рулевого агрегата курса через клеммы "26", "27" нижнего разъема блока, клеммы "5", "6" ("17", "18"; "29", "30") разъема Ш8 платформы ПКА-31 и клеммы "7", "8" разъемов Ш1, Ш2, ШЗ рулевого агрегата РА-56В1 канале курса. Шток рулевого агрегата отклоняется таким образом, чтобы отклонение руля направления парировало возникшую угловую скорость.
Величина отклонения штока определяется сигналом обратной связи, который поступает с индукционного датчика, расположенного в рулевом агрегате, на усилитель привода через клеммы "5", "10" разъемов Ш1, Ш2, ШЗ рулевого агрегата, клеммы "3", "7" ("15", "19"; "27", "31") разъема Ш3 платформы и клеммы "24", "25" нижнего разъема блока БАП. Усилитель привода запитывается от блока питания МУБП У12 постоянным напряжением ±25 В через клеммы П2-2 и П2-3. Для компенсации ненулевых сигналов на вход усилителя привода с блока питания подается напряжение центровки через регулировочное сопротивление R63 и резистор R64. Для исключения влияния колебания напряжения питания напряжение центровки стабилизируется стабилитронами Д9 и Д10. Блок питания через клеммы "1" и "3" запитан переменным напряжением 36 В 400 Гц.
Контроль канала курса ведется системой встроенного контроля по сигналу исправности подканалов рулевого агрегата и блока демпфирующих гироскопов, сигнал исправности рулевого агрегата поступает с клеммы "22" разъемов Ш1, Ш2, ШЗ рулевого агрегата через клеммы "10", "22", "34" разъема Ш8 и клеммы "12", "13", "14" второго верхнего разъема блока БВК на устройства автоматической закольцовки У81, У82, У83.
Исправность блока демпфирующих гироскопов оценивается кворум-элементом, расположенным в блоке БСН-7. При снятии двух из трех сигналов исправности на клемме "8" сигнализаторов напряжения У18, У19, У20 с клеммы "6" узлов логики У23 и У24 (узлы логики задублированы) поступает сигнал "2 отказа БДГ" на клеммы "54" и "55" нижнего разъема блока БСН. Этот сигнал поступает на клеммы "63" и "64" первого верхнего разъема БВК, с которого далее поступает на клеммы "4" релейных усилителей У20 и У21.
Усилители срабатывают и закольцовывают привод канала курса, снимая напряжение +27 В с клеммы "3" устройств закольцовки, при этом выдается соответствующая сигнализация пилоту, которая поступает с клеммы "10" усилителей на клемму "2" первого верхнего разъема и далее через клемму "12" разъема "21" платформы на табло отказа "ДЕМПФЕР КУРСА", находящийся на приборной доске.
При отсутствии двух из трех сигналов исправностей рулевого агрегата с клеммы "6" узлов логики У5 и У6 блока БВК сигнал "2 отказа" привода поступает на клемму "4" тех ре релейных усилителей У20 и У21, которые срабатывают аналогично первому случаю. Во всех остальных режимах работа канала курса аналогична изложенному выше. Особенности имеет только режим "Заход на посадку".
Включение канала курса производится одновременно с включением тумблера "САУ-СТУ" на верхнем щитке летчиков при включенных АЗС системы САУ и АБСУ, а также трех выключателях подканалов привода руля направления на пульте бортинженера при положении "РУЧН." тумблера "РУЧН. - АВТОМ.".
Работа привода канала курса контролируется пилотом по перемещение планки "Н" на приборе ИН-3-2, расположенном на приборной доске летчиков. Сигнал переменного тока с датчика траверсы рулевого агрегата крена через клеммы "З", "4" дополнительного разъема поступает на клеммы "39" и "40" разъема Ш8 платформы. Далее сигнал поступает на клеммы "46", "47" нижнего разъема блока управления БУ-65. В блоке управления этот сигнал поступает на клеммы "1" и "3" преобразователя сигналов У8, с выходной клеммы "8" которого через резистор R19 он поступает относительно средней точки на клемму "48" нижнего разъема блока.
В режиме автоматического захода на посадку канал курса работает следующим образом: при включении автоматического режима "Глиссада" сигнал включения режима поступает через клемму "48" нижнего разъема блока БАП на обмотку реле Р31. Контакты "2" и "3" реле Р31 замыкаются и через резисторы R87 и R88 подключает к усилителю привода канала курса У11 дополнительный сигнал, пропорциональный угловой скорости . Тем самым обеспечивается дополнительное демпфирование самолета в боковом канале в режиме автоматического захода на посадку на участке глиссады планирования. С клеммы "48" блока БУ-65 через клемму "2" разъема Ш5 платформы сигнал поступает на клемму "2" разъема индикатора ИН-3-2 и далее на рамку логометра, отклоняющего планку "Н".
Канал крена
Канал хрена стабилизирует угловое положение самолета относительно продольной и вертикальной осей, управляет боковым движением самолета, а также улучшает характеристики устойчивости и управляемости самолета по крену при ручном пилотировании.
Канал хрена работает в режимах: штурвальное управление, стабилизация и управление, автоматический полет по сигналам НВУ, автоматический полет по сигналам VОR, заход на посадку, уход на второй круг. В режимах автоматический полет по сигналам НВУ, автоматический полет по сигналам VОR и заход не посадку САУ-154-2 обеспечивает отклонение элеронов от соответствующих управляющих сигналов, а также демпфирование колебаний самолета вокруг продольной оси.
А. Режим "Штурвальное управление"
Канал крена в этом режиме демпфирует колебание самолета в полете относительно продольной оси и обеспечивает требуемые характеристики управляемости самолета по крену при ручном пилотировании.
Структурная схема канала крена в этом режиме показана на рис. 6.
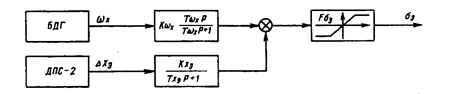
Рис.6. Структурная схема канала крена в режиме штурвального управления
В канале крена сервопривод АБСУ-154-2 отклоняет элероны по сигналам угловой скорости крена и отклонению штурвала. Отклонение сервопривода ограничено величиной  , выбранной из условия безопасности.
, выбранной из условия безопасности.
На точку суммирования поступает сигнал  , снимаемый с потенциометров блока демпфирующих гироскопов (БДГ) через фильтр вида
, снимаемый с потенциометров блока демпфирующих гироскопов (БДГ) через фильтр вида  и сигнал
и сигнал  , снимаемый с датчика положения штурвала (ДПС-2) через апериодическое звено
, снимаемый с датчика положения штурвала (ДПС-2) через апериодическое звено  .
.
Исполнительным механизмом канала крена (см. рис. 7) является РА-56В1, входящий в состав сервопривода СП-1Г.
Перемещение штока каждого подканала пропорционально величине управляющего сигнала. При возникновении колебаний самолета вокруг продольной оси блок БДГ-26 канала хрена вырабатывает электрический сигнал, пропорциональный возникающей угловой скорости . Далее этот сигнал поступает на вход фильтра Ф1, который представляет собой пассивную RС-ячейку с передаточной функцией реального дифференцирующего звена.
Демпфирование самолета осуществляется сигналом, пропорциональным угловому ускоренно вокруг продольной оси. С выхода фильтра сигнал поступает на вход усилителя сервопривода.
При перемещении штурвала летчиком вычислитель боковой управляемости блока БШУ-4 вырабатывает сигнал управляемости, пропорциональный отклонению штурвала. Алгебраическая сумма этих двух сигналов представляет собой управляющий сигнал канала крена.
На входе усилителя сервопривода управляющий сигнал алгебраически суммируется с сигналом отрицательной обратной связи. Сигнал ошибки, являющийся разностью этих двух сигналов, усиливается по величине, мощности и далее после его выхода поступает в обмотку преобразователя сигналов РА-56В1.
Преобразователь сигнала, перемещая золотник, вызывает перемещение поршня агрегата управления. Скорость перемещения поршня пропорциональна величине тока в обмотке ПС.
Перемещение поршня прекратится, когда сигнал ошибки на входе усилителя сервопривода будет равен нулю. Перемещение трех поршней и связанных с ним штоков агрегатов управления передается на выходной элемент РА-56В1.
Угол отклонения элеронов от РА-56В1 соответствует средневыборочному значению трех управляющих сигналов, поступающих в подканалы сервопривода. Элероны перемещаются от сигнала БДГ-26 таким образом, чтобы погасить колебания самолета по крену. Перемещение элеронов от управляющих сигналов всегда добавляется к перемещению элеронов, вызванному поворотом штурвала летчиком.

Рис.7. Функциональная схема канала крена в режиме штурвального управления
Управляющий сигнал, как показано на рис. 7, формируется в БШУ-4 по трем независимым, параллельно и одновременно работающим подканалам. При перемещении штурвала летчиком строенный датчик положения ДПС-2 вырабатывает сигнал  , пропорциональный этому перемещению штурвала. Сигнал переменного тока поступает на фазочувствительные преобразователи ПФ. С выхода преобразователей ПФ сигналы в виде напряжения постоянного тока, пропорционального углу поворота штурвала, поступают на вход УПТ-9. На этом усилителе сформирован фильтр Ф2. Фильтр представляет собой пассивную RС-ячейку с передаточной функцией инерционного звена. Сформированные по трем независимым подканалам сигналы управляемости с выходов УПТ-9 поступают на КЭ. Кворум-элемент формирует достоверный выходной сигнал, представляющий собой среднеарифметическое значение большинства входных сигналов, мало отличающуюся по величине.
, пропорциональный этому перемещению штурвала. Сигнал переменного тока поступает на фазочувствительные преобразователи ПФ. С выхода преобразователей ПФ сигналы в виде напряжения постоянного тока, пропорционального углу поворота штурвала, поступают на вход УПТ-9. На этом усилителе сформирован фильтр Ф2. Фильтр представляет собой пассивную RС-ячейку с передаточной функцией инерционного звена. Сформированные по трем независимым подканалам сигналы управляемости с выходов УПТ-9 поступают на КЭ. Кворум-элемент формирует достоверный выходной сигнал, представляющий собой среднеарифметическое значение большинства входных сигналов, мало отличающуюся по величине.
Если один из входных сигналов отличается от среднеарифметического более чем на заранее выбранную величину, что может быть при возникновении неисправности, то КЭ локализует этот сигнал. Кроме того, КЭ выдает сигнал отказа, который после логической обработки в СВК используется для сигнализации о работоспособности САУ-154-2 или отключения отказавших устройств.
Кворум-элемент позволяет исключить прохождение ложных сигналов, возникающих в случае отказов, на сервопривод, что повышает надежность канала.
Когда канал крена работает в режиме штурвального управления, элероны отклоняются при повороте штурвала под действием суммы двух движений:
- перемещения, определяемого кинематикой механической проводки управления;
- перемещения выходного звена РА-56В1.
Движение выходного звена РА-56В1 определяется законом управления канала крена. Сигнал демпфера, формируемый фильтром Ф1, пропорционален угловому ускорению движения самолета относительно продольной оси. Этот сигнал повышает степень затухания колебаний по крену. Сигнал с ДУС при установившейся скорости крена из-за наличия фильтра Ф1 не проходит на сервопривод. В противном случае отклонение управляющих поверхностей от РА-56В1 было бы меньше на величину, пропорциональную угловой скорости крена, и потребовало бы больших углов поворота штурвала для создания необходимой угловой скорости самолета по крену. Сигнал демпфера крена улучшает характеристики управляемости самолета, устраняя "зависание" самолета по крену.
Рассмотрим работу канала крена в штурвальном режиме по принципиальным электрическим схемам.
АБСУ в канале крена в режиме штурвального управления обеспечивает демпфирование колебаний самолета относительно продольной оси Х и улучшает характеристики боковой управляемости объекта. Канал крена ШУ АБСУ состоит из демпфера крена и вычислителя боковой управляемости.
В демпфер крена входит блок демпфирующих гироскопов БДГ крена и сервопривод СП1-Г элеронов.
В вычислитель боковой управляемости входят датчик ДПС-2, кинематически связанный с перемещением штурвала (обжатием пружинного загружателя), и собственно вычислитель боковой управляемости, расположенный в блоке БШУ.
Сервопривод состоит из блока демодуляции и усиления (усилитель привода) БДУ, расположенного в блоке БАП, и гидравлического рулевого агрегата РА-56В1, установленного в проводке управления элеронами.
Сигнал, пропорциональный угловой скорости , снимаемый со щетки потенциометра датчика угловой скорости ДУС, который расположен в блоке БДГ-26 (крена), относительно средней точки через клемму "6" I-го подканала ("16" – П-го подканала и "26" – III-го подканала) поступает на клемму "6" ("16", "26") разъема Ш4 платформы ПКА-31. Питание ±12,5 В на потенциометр ДУС поступает с блока питания БПН У10 (У11, У12), расположенного в блоке БШУ-4, через клеммы "8", "9" ("18". "19"; "28", "29") верхнего разъема блока, клеммы "1", "2" ("11", "12"; "21", "22") разъема Ш4 платформы ПКА-31 и клеммы "1", "2- ("11", "12"; "21", "22") разъема блока БДГ. Блоки питания через клеммы "1", "3" запитаны переменным напряжением 36 В 400 Гц.
С разъема Ш4 сигнал угловой скорости поступает в блок БАП на клемму "13" нижнего разъема. В блоке сигнал поступает на регулировочное сопротивление R48 и далее на изодромный фильтр СЗ - С4, с выхода которого сигнал поступает на вход усилителя привода У10. При наличии угловой скорости с усилителя привода сигнал постоянного тока поступает на преобразователь сигналов ПС рулевого агрегата крена через клеммы "18", "19" нижнего разъема блока, клеммы "5", "6" ("17", "18"; "29", "30") разъема Ш8 платформы ПКА-31 и клеммы "7", "8" разъемов Ш1, Ш2, ШЗ рулевого агрегата РА-56В1 крена.
Шток рулевого агрегата отклоняется таким образом, чтобы отклонение элеронов парировало возникшую угловую скорость. Величина отклонения штока определяется сигналом обратной связи, который поступает с индукционного датчика, расположенного в рулевом агрегате, на усилитель привода через клеммы "5", "10" разъемов Ш1, Ш2, ШЗ рулевого агрегата, клеммы "З", "7" ("15", "19"; "27", "31") разъема Ш7 платформы и клеммы "16", "17" нижнего разъема блока БАП. Усилитель привода запитывается от блока питания МУБП У7 постоянным напряжением +27 В через клеммы П2-2 и П2-3. Для компенсации ненулевых сигналов на вход усилителя привода с блока питания подается напряжение центровки через регулировочное сопротивление R54 и постоянный резистор R55. Для исключения влияния колебания напряжения питания напряжение центровки стабилизируется стабилитронами Д17 и Д18. Блок питания через клеммы "1" и "3" запитан переменным напряжением 36 В 400 Гц.
Контроль канала демпфера крена ведется системой встроенного контроля по сигналу исправности подканалов рулевого агрегата. Сигнал исправности рулевого агрегата поступает с клеммы "22" разъемов Ш1, Ш2, Ш3 рулевого агрегата через клеммы "10", "22", "34" разъема Ш7 и клеммы "9", "10", "11" второго верхнего разъема блока БВК на устройства автоматической закольцовки УАЗ У78, У79, У80.
При отсутствии двух из трех сигналов исправностей рулевого агрегата с клеммы "6" узлов логики (УЛ-6) УЗ и У4 блока (узлы логики задублированы) сигнал "2 отказа" привода поступает на клемму "4" релейных усилителей УР-9. У18 и У19.
Дата публикования: 2015-11-01; Прочитано: 2332 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
