 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Скорость точки. Ускорение точки. Равнопеременное движение точки
|
|
Скорость точки
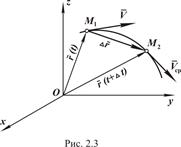
Определим скорость точки, рассматривая векторный способ задания ее движения. Пусть в момент времени t положение точки определяется радиусом  , а в момент (
, а в момент ( ) радиус-вектором
) радиус-вектором  . Вектор
. Вектор  есть вектор перемещения точки за время t (рис. 2.3).
есть вектор перемещения точки за время t (рис. 2.3).
Вводим понятие средней скорости,  . (2.3)
. (2.3)
Скорость точки в данный момент времени есть предел отношения вектора перемещения  к промежутку времени
к промежутку времени  , за который произошло это перемещение при , стремящемся к нулю, то есть
, за который произошло это перемещение при , стремящемся к нулю, то есть 
а это есть производная  . Таким образом, скорость точки равна производной радиус-вектора точки по времени, а именно
. Таким образом, скорость точки равна производной радиус-вектора точки по времени, а именно  , (2.4)
, (2.4)
и направлена по касательной к траектории в сторону движения. Единицами измерения скорости являются м/c, км/ч.
Определение скорости
при координатном способе задания движения
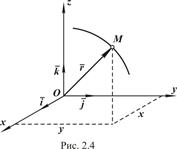 Пусть движение точки задано в декартовой системе координат, являющейся неподвижной (рис. 2.4), то есть заданы координаты точки как функции времени x=x (t), y=y (t), z=z (t).
Пусть движение точки задано в декартовой системе координат, являющейся неподвижной (рис. 2.4), то есть заданы координаты точки как функции времени x=x (t), y=y (t), z=z (t).
 Используя единичные векторы
Используя единичные векторы  осей x, y, z, определяем радиус-вектор:
осей x, y, z, определяем радиус-вектор:  (2.5)
(2.5)
и далее вектор скорости:  , (2.6)
, (2.6)
так как единичные векторы данной неподвижной системы координат постоянны.
Вектор скорости  , как и любой вектор, можно также представить через его проекции, используя единичные векторы, то есть
, как и любой вектор, можно также представить через его проекции, используя единичные векторы, то есть  .
.
Сравнивая два последних выражения, получаем, что проекции скорости  на координатные оси будут равны
на координатные оси будут равны 

 , (2.7)
, (2.7)
то есть проекция скорости точки на координатную ось равна первой производной по времени от соответствующей этой оси координаты.
Производную по времени в теоретической механике обозначают точкой сверху, поэтому можно еще записать  ,
,  ,
,  . (2.8)
. (2.8)
 Вектор скорости определяется модулем
Вектор скорости определяется модулем  (2.9)
(2.9)
и направлением, которое задается направляющими косинусами:
 . (2.10)
. (2.10)
Определение скорости
при естественном способе задания движения
Пусть точка М движется по некоторой кривой (рис. 2.5). За промежуток времени t точка перемещается из положения  в положение
в положение  по дуге.
по дуге.
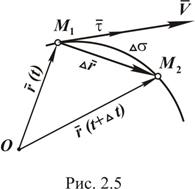 Дуга обозначается как
Дуга обозначается как  , а перемещение –
, а перемещение –  . Зная, что
. Зная, что  ,
,
запишем его в другом виде:
 .
.
Так как предел отношения дуги к стягивающей ее хорде равен по модулю единице, а предельное положение секущей  (при
(при  ) совпадает с направлением касательной к кривой в точке
) совпадает с направлением касательной к кривой в точке  , то
, то  ,
,
где  единичный вектор касательной к кривой, направленный в сторону положительного отсчета дуги (рис. 2.5).
единичный вектор касательной к кривой, направленный в сторону положительного отсчета дуги (рис. 2.5).
Рассматривая второй предел  получаем
получаем  . (2.11)
. (2.11)
Обозначив  , имеем
, имеем  , где
, где  проекция скорости на касательную.
проекция скорости на касательную.
Ускорение точки
Определение ускорения точки при векторном способе задания движения. Полагаем, что в момент времени t скорость равна  а в момент времени
а в момент времени  – соответственно
– соответственно  (см.рис. 2.6).
(см.рис. 2.6).
 Изменение вектора скорости за промежуток времени
Изменение вектора скорости за промежуток времени  определяется как
определяется как
 .
.
Среднее ускорение определяем как отношение  к , то есть
к , то есть  .
.
Ускорение точки в данный момент времени есть предел отношения приращения скорости 
 к приращению времени при , стремящемся к нулю:
к приращению времени при , стремящемся к нулю: 
и так как  то
то 
Следовательно, ускорение точки равно первой производной по времени вектора скорости точки или второй производной по времени радиуса-вектора точки. Единицей измерения ускорения является м/с  .
.
Определение ускорения при координатном способе задания движения. Пусть движение точки задано в прямоугольной системе координат:
x = x (t), y = y (t), z = z (t).
Ускорение точки определяется (2.13) как  .
.
Вектор ускорения можно представить через его проекции  .
.
Сравнивая два последних выражения, имеем 

 , (2.14)
, (2.14)
то есть проекция ускорения точки на какую-либо координатную ось равна первой производной от соответствующей проекции скорости.
Выражение (2.14), с учетом (2.8), можно представить в виде  ,
,  ,
,  .
.
Таким образом, проекция ускорения точки на какую-либо ось равна второй производной по времени от соответствующей координаты.
Модуль ускорения определяется как  ,
,
а направление задается направляющими косинусами: 
 .
.
Формулы (2.16), (2.17) полностью определяют вектор ускорения.
Определение ускорения при естественном способе задания движения. Прежде чем определить ускорение, введем некоторые понятия из дифференциальной геометрии. В каждой точке кривой можно указать три взаимно перпендикулярных направления – касательная, нормаль и бинормаль. Принимая эти направления за координатные оси, введем единичные векторы этих осей  .
.
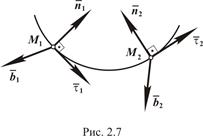 Единичный вектор касательной
Единичный вектор касательной  уже был введен. Единичный вектор нормали
уже был введен. Единичный вектор нормали  направляем в сторону вогнутости кривой (рис. 2.7). Единичный вектор бинормали
направляем в сторону вогнутости кривой (рис. 2.7). Единичный вектор бинормали  направлен таким образом, чтобы единичные вектора образовывали правую систему координат.
направлен таким образом, чтобы единичные вектора образовывали правую систему координат.
Векторы являются единичными векторами осей естественного трехгранника.
Согласно выражению (2.13) ускорение точки  , а ее скорость
, а ее скорость  , следовательно,
, следовательно, 
Примем без доказательства, что  ,
,
где  радиус кривизны траектории в рассматриваемой точке.
радиус кривизны траектории в рассматриваемой точке.
Отсюда имеем  .
.
Видно, что ускорение имеет две составляющие:  и
и  ,
,
 направленные по и
направленные по и  (рис. 2.8), первая из которых называется касательным ускорением, вторая нормальным ускорением.
(рис. 2.8), первая из которых называется касательным ускорением, вторая нормальным ускорением.
Касательное ускорение характеризует изменение модуля скорости, а нормальное ускорение характеризует изменение скорости по направлению.
Модуль ускорения равен  .
.
Составляющие ускорения всегда взаимно перпендикулярны (рис. 2.8).
Касательное ускорение равно нулю при движении точки с постоянной по модулю скоростью. Нормальное ускорение равно нулю при прямолинейном движении точки.
Дата публикования: 2015-11-01; Прочитано: 392 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
