 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Теоретическое введение. В общем случае линейные непрерывные системы автоматического регулирования (САР) в целом, либо каждое звено в отдельности
|
|
В общем случае линейные непрерывные системы автоматического регулирования (САР) в целом, либо каждое звено в отдельности, описываются линейными дифференциальными уравнениями произвольного порядка.

|
| Рисунок 6 |
Для звена, изображенного на рис. 6, дифференциальное уравнение имеет следующий вид:
 . (1)
. (1)
Данное уравнение характеризует связь между входной и выходной величинами при произвольных входных воздействиях и называется уравнением динамики.
При постоянном входном воздействии x=x 0 =const, после окончания переходных процессов, выходная координата также принимает постоянное значение у = у 0 = const.
Режим работы звена или системы в целом, при котором все действующие сигналы не являются функциями времени, называется статическим.
Уравнение, описывающее статический или установившийся режим работы, называют уравнением статики.
Для рассматриваемого звена оно имеет вид
F (x 0, y 0) = 0. (2)
Статический режим работы можно описать графически с использованием статических характеристик.
Статической характеристикой звена (или системы) называют зависимость выходной величины Y от входной X в установившемся режиме. Для линейного звена эта зависимость определяется как
Y = К × Х, (3)
где К – статический коэффициент передачи.
Статическая характеристика может быть построена экспериментально, если подавать на вход звена ряд постоянных входных воздействий  и измерять выходную величину
и измерять выходную величину  в установившемся режиме. Процесс аппроксимации статической характеристики представлен на рис.7.
в установившемся режиме. Процесс аппроксимации статической характеристики представлен на рис.7.
Рисунок 7
Коэффициент передачи К определяется по статической характеристике звена как отношение приращения выходной величины D Y к приращению входной величины D X
 (4)
(4)
§ Структурная схема замкнутой статической системы стабилизации скорости вращения вала двигателя в установившемся режиме приведена на рис. 8.
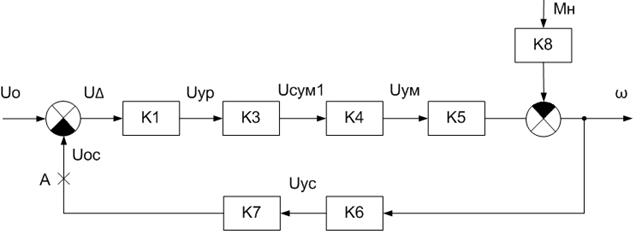
Рисунок 8
Здесь K 1 – коэффициент передачи усилителя рассогласования УР;
К 3 – коэффициент передачи первого сумматора;
К 4 – коэффициент передачи усилителя мощности УМ;
K 5 – коэффициент передачи двигателя по скорости;
К 6 – коэффициент передачи датчика скорости ДС;
К 8 – коэффициент передачи звена, учитывающего влияние изменения момента нагрузки на изменение скорости вращения вала двигателя.
§ Если положить U 0 = 0, M H = 0 и разорвать цепь обратной связи в точке А, то получим структурную схему разомкнутой статической системы стабилизации скорости, изображенную на рис. 9.

Рисунок 9
Подавая на вход первого звена ряд значений сигнала U D, на выходе разомкнутой системы будем иметь соответствующие значения сигнала u ОС. Таким образом, по полученным данным может быть построена статическая характеристика разомкнутой системы. Отношение изменения выходного напряжения D U ОС к вызвавшему это изменение входному напряжению D(U Δ) называется коэффициентом передачи разомкнутой системы К р.
 (5)
(5)
Из формулы (5) следует, что К р является безразмерной величиной.
Величина К р является одной из важнейших характеристик при оценке работы САР.
С другой стороны, значение К р может быть рассчитано, как произведение коэффициентов передачи всех звеньев, входящих в контур регулирования:
 (6)
(6)
§ Следующей исследуемой структурой является система стабилизации напряжения генератора постоянного тока. Структурная схема замкнутой статической системы регулирования приведена на рис.10, где K 9 – коэффициент передачи устройства двигатель-генератор.
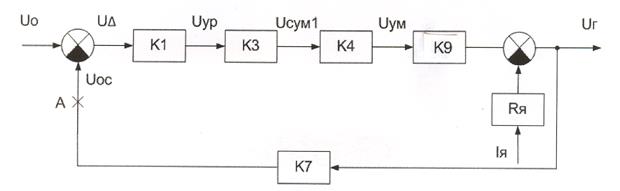
Рисунок 10
Структурная схема разомкнутой статической системы стабилизации напряжения генератора постоянного тока приведена на рис.11.

Рисунок 11
Коэффициент передачи разомкнутой системы в данном случае будет равен
 (7)
(7)
Дата публикования: 2015-10-09; Прочитано: 272 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
