 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Визначення потужності приводів гусеничних механізмів пересування ОЕ
|
|
У сучасних екскаваторах, які використовуються при виконанні землерийних робіт у будівництві та видобуванні корисних копалин відкритим способом в якості механізмів пересування в більшості використовують гусеничні рушії. Саме вони забезпечують пересування екскаваторів по досить складних рельєфах вибоїв і земляних спорудах та утримують машини в рівновазі при виконанні складних технологічних операцій з руйнування, переміщення та укладання ґрунтів у споруди.
Гусеничні механізми пересування мають значні відмінності в конструкціях, способах передачі тиску на ґрунт та пристосованості гусеничних ланцюгів (гусениць) до нерівності поверхні, якою вони пересуваються. Найбільш поширена наступна класифікація гусеничних рушіїв [5, 6, 7] за наступними признаками:
- кількістю гусениць (двогусеничні та багато гусеничні);
- типом гусениць (багато опорні та мало опорні);
- можливістю пристосування до нерівності поверхні (жорсткі та м’які);
- наявністю гусеничних рам (рамні та без рамні);
- конструкцією опорних котків (мало котків великого діаметра – мало–опорні), (багато котків з’єднаних у балансири – м’які багато опорні);
- типом гусеничних зачеплень, які забезпечують передачу тягового зусилля від ведучої зірочки до гусеничного ланцюга (кулачково–гребневі; цівкові; зубчасті).
Двогусеничні рушії (рис. 3.12.) складаються з двох гусениць, які жорстко з’єднані між собою нижньою рамою 4. Кожна гусениця являє собою гусеничний ланцюг 1, як замкнутий контур, який охоплює ведучі 2, натяжні 7 та опорні котки 3 і складається з окремих ланок з’єднаних між собою пальцями. В даному випадку приведена конструкція мало опорного механізму пересування для якого характерна наявність опорних котків з великого діаметра які консольно установлені в нижню раму 4. На нижній рамі установлено рейковий круг 5 по якому переміщаються котки опорно–поворотного механізму та зубчастий вінець поворотного механізму. Тягові зусилля на гусеничний ланцюг та ведуче колесо передається від електродвигуна 9 за допомогою бортової трансмісії 10 і 11. При прямолінійному русі крутний момент синхронно передається на ліве і праве ведучі колеса 7, а при необхідності повороту одне із ведучих коліс за допомогою муфт може відключитись і одна із гусениць 12 або 13 стає нерухомою, тобто на неї не передається крутний момент, а друга гусениця в цей час робить «забігання» навколо нерухомої, що і забезпечує маневрування екскаватора.
При роботі гусеничного рушія в вибої або на спорудженні земляних споруд в з’єднання і вузли механізму попадають абразивні речовини та вода, що веде до швидкого зносу деталей, особливо шарнірного з’єднання гусеничного ланцюга. Це в свою чергу веде до збільшення відстані між центрами гусеничних ланок і збільшенню периметра гусеничного ланцюга та порушенню зачеплення між ведучим колесом та ланцюгом і навіть до «виклинювання» гусеничних ланок із зони зачеплення. Для забезпечення нормальної роботи зачеплення необхідно користуватися натяжним механізмом, що забезпечується зміною положення натяжного колеса 7 за допомогою пластин 8 (див. рис. 3.12). В конструкціях гусеничних рушіїв можуть бути різні варіанти компоновки як привода з передатними механізмами різних кінематичних схем, так і натяжних пристроїв, та способів установки опорних і підтримуючих котків, але обов’язковими є наявність гусеничного ланцюга, ведучих та натяжних коліс, опорних катків, а також самого привода. Це дає змогу для визначення параметрів привода користуватися методиками визначення тягового зусилля розроблену професором М.Г. Домбровським іще в минулому столітті [__]. Великий розвиток в теорію розрахунків гусеничних рушіїв екскаваторів внесли такі вчені як Антонов, Гомозов, Маєвський та інші.
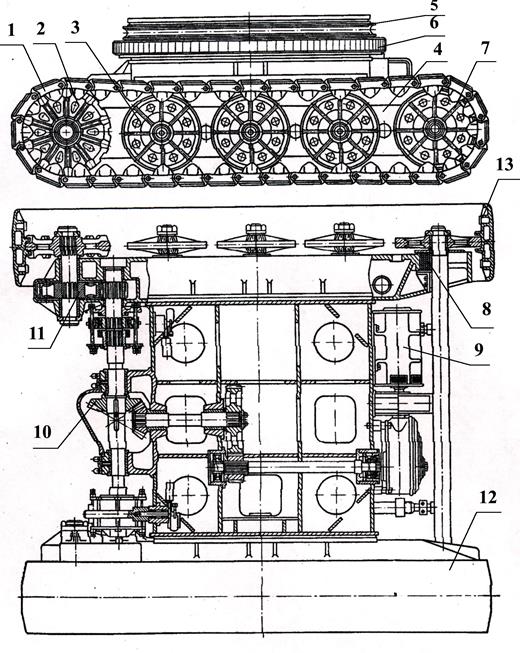
1 – гусеничний ланцюг; 2 – приводне колесо; 3 – опорний каток; 4 – нижня рама; 5 – рейковий круг нижній; 6 – зубчастий вінець; 7 – натяжне колесо; 8 – натяжний пристрій; 9 – електродвигун приводу хода;
10 – передатний механізм; 11 – бортова (зубчаста передача;
12 – гусениця; 13 – трак
Рисунок 3.12 – Конструкція двухгусеничного рушія
Розрахунок починається з вибору конструктивної схеми гусеничного рушія та визначення розмірів основних елементів, після чого виконуються проектні розрахунки, які починаються з визначення тягового зусилля.
Дата публикования: 2015-09-17; Прочитано: 424 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
