 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
И их связь с линейными характеристиками
|
|
Вращение отличается от поступательного движения тем, что точки тела в этом случае описывают концентрические окружности разных радиусов, то есть движутся не одинаково. Кроме того, имеется совокупность неподвижных точек, называемых осью вращения.
Очевидно, что путь, пройденный каждой точкой за одно и то же время будет разным, различной будет и скорость движения. Не составляет труда найти такую величину, которая описывала бы перемещение тела и оставалась бы одинаковой для всех его точек. Такой величиной будет бесконечно малый угол поворота d j. Из геометрии известно, что он связан с дугой ds окружности через ее радиус:
| ds = Rd j. | (2.28) |
Для характеристики направления вращения принято считать величину  вектором, направление которого следует увязать с заданными уже векторами
вектором, направление которого следует увязать с заданными уже векторами  и
и  , которые перпендикулярны друг другу (рис. 2.11).
, которые перпендикулярны друг другу (рис. 2.11).
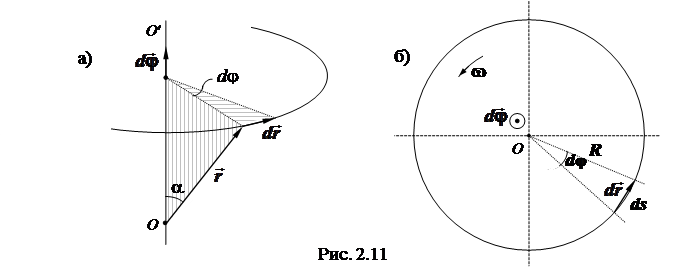
Если направить вектор  по оси вращения, связав его направление с направлением вращения правилом буравчика, то вектор перемещения будет равен векторному произведению векторов и :
по оси вращения, связав его направление с направлением вращения правилом буравчика, то вектор перемещения будет равен векторному произведению векторов и :
 , ,
| (2.29) |
то есть вектор перемещения направлен перпендикулярно плоскости, в которой лежат вектора и (вертикальная штриховка на рис. 2.11а). Изменение порядка написания векторов и , очевидно, изменит знак векторного произведения на противоположный.
Из рис. 2.11 следует, что модуль вектора перемещения
 , или , или  , ,
| (2.30) |
что совпадает с выражением (2.28). На рис.2.11(б) представлен вид сверху на рис. 2.11(а), вдоль оси О'О. Вектор  на этом рисунке направлен "к нам", что показано кружком с точкой посередине.
на этом рисунке направлен "к нам", что показано кружком с точкой посередине.
Введём вектор угловой скорости, который будет характеризовать как быстроту, так и направление вращения:
 . .
| (2.31) |
Направление  совпадает с , то есть с осью вращения и определяется по правилу буравчика. Дифференцируя (2.29) по времени, получим связь между угловой скоростью и линейной скоростью точки:
совпадает с , то есть с осью вращения и определяется по правилу буравчика. Дифференцируя (2.29) по времени, получим связь между угловой скоростью и линейной скоростью точки:
 , ,
| (2.32) |
или
 . .
| (2.33) |
Раскрывая векторное произведение, получим выражение для модуля линейной скорости:
 , ,
| (2.34) |
так как r sina = R (см. рис. 2.11).
Определим теперь угловое ускорение как быстроту изменения угловой скорости во времени:
 . .
| (2.35) |
Вектор  , так же, как и векторы угловой скорости и углового перемещения, направлен по оси вращения. При ускоренном вращении (
, так же, как и векторы угловой скорости и углового перемещения, направлен по оси вращения. При ускоренном вращении ( ) его направление совпадает с вектором угловой скорости, при замедленном вращении (
) его направление совпадает с вектором угловой скорости, при замедленном вращении ( ) вектор углового ускорения направлен противоположно вектору . Если направление оси вращения изменяется, то вектор не совпадает с осью вращения, но всегда остается направленным по вектору
) вектор углового ускорения направлен противоположно вектору . Если направление оси вращения изменяется, то вектор не совпадает с осью вращения, но всегда остается направленным по вектору  .
.
Связь углового ускорения с линейным ускорением получим, дифференцируя (2.33) по времени:

| (2.36) |
или:
 . .
| (2.37) |
Таким образом, линейное ускорение вращающейся точки рано сумме тангенциального

| (2.38) |
и нормального

| (2.39) |
ускорений:  .
.
Раскрывая векторное произведение (2.38), получим:
| a t=e rsin a= e R, | (2.40) |
то есть тангенциальное ускорение точки пропорционально радиусу окружности, по которой эта точка движется. Отметим, что при замедленном вращении ускорения e и a t отрицательны.
Величину нормального ускорения найдем, раскрывая векторное произведение (2.39):
 . .
| (2.41) |
Модуль полного ускорения вращающейся точки
 . .
| (2.42) |
Уместно обсудить вопрос о размерностях (единицах измерения) введённых выше кинематических характеристик вращения. Их три: угол поворота, угловая скорость и угловое ускорение. Угол поворота измеряется в радианах (рад), а не в градусах. Радиан – безразмерная величина, т.к. определяется по отношению длины дуги к радиусу, следовательно, угол поворота или угловое перемещение – величина безразмерная. Угловая скорость, следовательно, измеряется в рад/с, а ускорение – в рад/с2. Соответствующие размерности: [ w ] = c–1; [ e ] = c–2.
Дата публикования: 2014-10-19; Прочитано: 820 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
