 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Устойчивость движения судна на траектории
|
|
Обеспечение устойчивого движения судна по траектории, выбранной судоводителем, является необходимым условием при проектировании средств управления движением судна. В реальных условиях плавания на судно действует, кроме тяги движителей и сил от рулей, много других сил непрерывного времени действия, например, от ветра, волнения, течения. Поэтому, чтобы удерживать судно на заданной траектории, необходимо перекладывать рули. Если эффективности СУ при этом оказывается недостаточно, то судно будет уходить с заданной траектории, т.е. потеряет управляемость.
Другим моментом, связанным с устойчивостью судна на курсе, является кратковременные случайного характера силовые воздействия, например, от порыва ветра или волны. Воздействие на судно таких сил также выводит судно из установившегося режима движения, и параметры движения получают некоторые малые приращения. После прекращения действия случайных сил судно будет совершать возмущенное движение. По А.М. Ляпунову, если по прошествии некоторого времени судно возвращается к исходному режиму движения, который соответствовал закону перекладки рулей, то судно принято считать АСМПТОТИЧЕСКИ (автоматически) устойчивым. Если возмущенное движение затухает не до нуля, а устремляется к другому аналогичному виду установившегося движения, то судно называется НЕАСИМПТОТИЧЕСКИ устойчивым. В обоих случаях судно считается ТЕОРЕТИЧЕСКИ устойчивым. Если небольшое отклонение судна от исходного режима с течением времени будет возрастать, то судно считается ТЕОРЕТИЧЕСКИ НЕУСТОЙЧИВЫМ. При свободном возмущенном движении приращения одних параметров могут возрастать, а других - стремиться к нулю. Тогда говорят, что судно устойчиво по одним параметрам и неустойчиво по другим.
Для судовых корпусов выполнение условия теоретической устойчивости потребует больших конструктивных наделок в корме по типу хвостовой оконечности самолета, хвоста рыбы и т.п., что в условиях ограниченной осадки судна затруднено. Кроме того, такие наделки, улучшая устойчивость на курсе, будут ухудшать поворотливость судна. Поэтому подавляющее число судов являются теоретически неустойчивыми на курсе. Самопроизвольное движение таких судов при не переложенных рулях представляет циркуляцию с некоторым радиусом  . Удержание на заданном курсе такого судна обеспечивается путем соответствующего реагирования на возмущение знакопеременной (с одного борта на другой борт) перекладкой руля, как это показано на рисунке 1.5.
. Удержание на заданном курсе такого судна обеспечивается путем соответствующего реагирования на возмущение знакопеременной (с одного борта на другой борт) перекладкой руля, как это показано на рисунке 1.5.
Восстановление первоначальных параметров движения судна по прекращении действия случайного возмущения может происходить как автоматически (без реагирования СУ), так и помощью реагирования на это возмущение перекладкой СУ. Система КОРПУС - СУ называется разомкнутой, если параметры криволинейного движения не связаны функционально с перекладкой СУ. Устойчивость разомкнутой системы при неподвижных рулях называют СОБСТВЕННОЙ УСТОЙЧИВОСТЬЮ судна. Для замкнутой системы, в которой параметры движения судна функционально связаны с перекладкой СУ, устойчивость судна называют ЭКСПЛУАТАЦИОННОЙ.
Исследуя процесс удержания на курсе неустойчивого судна, выделим несколько этапов. Пусть судно движется на прямом курсе с постоянной скоростью. Рули находятся в нейтральном положении.
Этап 1 (рис. 1.5) начинается с того, что в некоторый момент под воздействием случайных внешних причин судно начинает уклоняться от курса. Угловая скорость  и угол курса c растут.
и угол курса c растут.
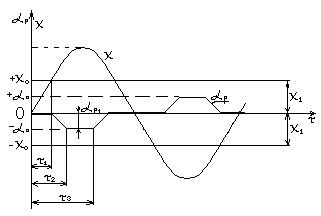
Рис. 1.5. Удержание на курсе неустойчивого судна.
Однако до тех пор, пока отклонение судна от курса лежит внутри зоны чувствительности рулевого (c < c0), руль остается не переложенным. При c=c0, когда судоводитель заметит начавшееся отклонение от прямого курса, он принимает решение переложить руль на борт, противоположный отклонению носовой оконечности. На этапе 2 рули перекладываются из нейтрального положения на угол aр1 достаточный для того, чтобы остановить отклонение судна и вернуть его на прежний курс. На этапе 3 угол перекладки рулей остается постоянным. Под действием рулевой силы сначала угловая скорость, а затем и угол курса, пройдя максимальные значения, начинают уменьшаться, и судно начинает возвращаться на первоначальный курс. На этапе 4 в выбранный судоводителем момент t = t3 руль возвращается в нейтральное положение.
Естественные неточности в выборе этого интуитивного момента и величине угла перекладки рулей компенсируются за счет последующих перекладок рулей при движении судна по заданному курсу. Чем более неустойчиво судно на курсе, тем чаще и на большие углы приходится перекладывать судоводителю рули. Может оказаться, что эффективности рулей будет недостаточно. Или перекладывать рули нужно будет слишком часто, чтобы судоводитель мог осознанно их осуществлять.
Устойчивость судна на прямом курсе в теории управляемости предлагается оценивать с помощью такого критерия:

 (1.3)
(1.3)
Для судов внутреннего плавания Правилами Регистра регламентируются:  , а для морских судов
, а для морских судов  .
.
Удовлетворение основным критериям управляемости обязательно для каждого судна.
Группа эксплуатационных критериев учитывает дополнительные требования к управляемости судна.
Дата публикования: 2014-11-02; Прочитано: 1545 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
