 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Системы координат
|
|
Для определения движения судна по поверхности воды введем следующие системы координат (рисунок 1.2).
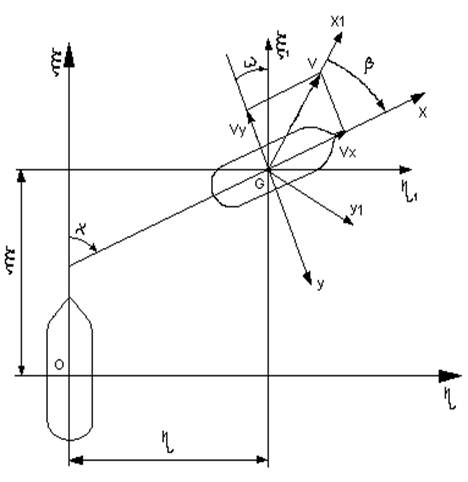
Рис. 1.2. Системы координат, применяемые для определения движения.
Система A – неподвижная, связанная с землей прямоугольная система координат 0, x, h, предназначенная для определения положения судна на поверхности воды.
Система B – полусвязанная система координат G,x1, h1, предназначенная для отсчета угла курса c, с началом G в центре тяжести судна. Ось Gx1 параллельна оси 0x, а ось Gh1 параллельна оси 0h.
Система C1 – поточная, связанная с вектором линейной скорости центра тяжести (ЦТ) судна 
 система координат Gx1y1. Ось Gx1 направлена вдоль вектора , а ось Gy1 – на правый борт. Система C1 предназначена для отсчета угла дрейфа b.
система координат Gx1y1. Ось Gx1 направлена вдоль вектора , а ось Gy1 – на правый борт. Система C1 предназначена для отсчета угла дрейфа b.
Система С2 - поточная, связанная с вектором линейной скорости V центра масс судна относительно воздуха, система координат Gx2y2. Ось Gx2 направлена вдоль вектора V, а ось Gy2 направлена на правый борт. Эта система предназначена для определения параметров потока воздуха, набегающего на надводную часть корпуса.
Система D – связанная с судном система координат Gxy с началом в ЦТ судна. Ось Gx направлена в нос, а ось Gy – на правый борт. Система D предназначена для составления уравнений движения.
Все системы координат являются прямоугольными.
Исследование управляемости судна ведется в связанной системе координат D, так как в этом случае система уравнений имеет наиболее простой вид, а также многие силы и моменты, действующие на судно, определяются в системах координат C и D. Но траектория движения судна определяется в неподвижной системе координат A.
Дата публикования: 2014-11-02; Прочитано: 960 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
