 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Принцип действия 7 страница
|
|
Управляющий сигнал  формируется:
формируется:
- из позиционного сигнала  с передаточным коэффициентом
с передаточным коэффициентом  , пропущенного через апериодическое звено с постоянное времени
, пропущенного через апериодическое звено с постоянное времени  ;
;
- сигнала производной  с передаточным коэффициентом
с передаточным коэффициентом  и постоянной времени
и постоянной времени  ;
;
- сигнала интеграла с передаточным коэффициентом  , пропущенного через ограничение
, пропущенного через ограничение  для обеспечения безопасности полета. Такой закон управления обеспечивает астатичность системы к внешним возмущениям.
для обеспечения безопасности полета. Такой закон управления обеспечивает астатичность системы к внешним возмущениям.
Дальнейшее формирование сигнала  в режиме стабилизации приборной скорости показано на схеме рис. 20 (точка А и далее) и описано ранее.
в режиме стабилизации приборной скорости показано на схеме рис. 20 (точка А и далее) и описано ранее.
Особенностью является введение дополнительного демпфирования увеличением коэффициента  .
.
При полете самолета в болтанку сигнал производной отключается.
При включении режима "Стабилизация  " отключаются режимы "Стабилизация Н", "Стабилизация М", формирование управляющего сигнала в этом режиме осуществляется вычислителем ВКВ-2 так же, как в режиме "Стабилизация Н" (см. рис. 21).
" отключаются режимы "Стабилизация Н", "Стабилизация М", формирование управляющего сигнала в этом режиме осуществляется вычислителем ВКВ-2 так же, как в режиме "Стабилизация Н" (см. рис. 21).
Вместо сигнала  на вход усилителя поступает сигнал - отклонение от заданной скорости полета, формируемый корректором-задатчиком скорости КЗСП.
на вход усилителя поступает сигнал - отклонение от заданной скорости полета, формируемый корректором-задатчиком скорости КЗСП.
Рассмотрим работу канала тангажа в режиме "Стабилизация приборной скорости" по принципиальным электрическим схемам. АБСУ в канале тангажа в режиме стабилизации приборной скорости обеспечивает демпфирование колебаний самолета относительно оси z, стабилизирует текущую приборную скорость полета.
Канал тангажа АБСУ в режиме стабилизации приборной скорости автоматически устанавливает руль высоты в балансировочное положение.
Режим стабилизации приборной скорости обеспечивается вычислителем автопилота, вычислителем режимов стабилизации высоты, числа М и приборной скорости.
Отработка руля высоты в балансировочное положение обеспечивается так же, как в режиме стабилизации, вычислителем автоматического триммирования с помощью исполнительного механизма МЭТ-4У.
Демпфирование колебаний самолета осуществляется демпфером тангажа. Дополнительное демпфирование в режиме стабилизации скорости осуществляется аналогично режиму стабилизации высоты.
Рассмотрим работу канала тангажа в режиме стабилизации скорости по принципиальным электрическим схемам.
Стабилизация приборной скорости самолета осуществляется автопилотом автоматически при включении режима по сигналу отклонения от скорости с корректоров КЗСП.
При отклонении самолета от текущей скорости, при которой был включен режим, сигнал, пропорциональный отклонению от скорости, снимается с корректора скорости №1 по постоянному току относительно средней точки и через клемму "7" разъема Ш11 платформы поступает на клемму "51" разъема ВКВ, далее на регулировочное сопротивление R6. Сигнал с корректора скорости №2 через клемму "10" разъема Ш11 поступает на клемму "54" разъема ВКВ и далее на регулировочное сопротивление R8. В блоке ВКВ сигнал со щетки регулировочного сопротивления R6 поступает на клемму "8" разъема ВКВ, а через контакты реле Р9 и постоянный резистор R3 на вход усилителя У1. С выхода усилителя УЗ сигнал поступает через резистор R13 на вход блока интеграла У4, через контакты реле Р10 и фильтр, образованный резисторами R23, R24 и конденсаторами С3, С6, сигнал поступает на вход усилителя У6, а через контакт реле Р24, фильтр С2 и R22 - также на вход выходного усилителя У6. С выхода блока интеграла сигнал через резистор R17 поступает на вход усилителя У6. Таким образом, на входе усилителя У6 присутствуют три сигнала. Первый сигнал через фильтр R23, R24 и СЗ, С6 пропорционален отклонению от приборной скорости, второй сигнал через фильтр С2 и R22 пропорционален производной отклонения от скорости, третий сигнал через резистор R17 пропорционален интегралу отклонения от скорости.
С выхода усилителя У6 сигнал поступает на вход суммирующего усилителя автопилота. Далее сигнал поступает на усилитель привода, шток рулевой машинки отклоняет руль высоты в сторону, необходимую для устранения отклонения от скорости. Самолет изменяет тангаж, появляющийся сигнал отклонения от тангажа с гировертикали поступает на вход суммирующего усилителя автопилота и компенсирует сигнал с вычислителя стабилизации скорости. Сигнал на выходе суммирующего усилителя становится нулевым, руль высоты устанавливается в нуль и самолет изменяет тангаж. По мере изменения угла тангажа отклонение от скорости начинает уменьшаться, сигнал тангажа отклоняет руль высоты в другую сторону, заставляя самолет изменить угол тангажа в сторону прежнего значения. Когда самолет вернется на прежнюю скорость, угол тангажа самолета будет прежним, но изменится угол атаки самолета.
Контроль режима стабилизации скорости осуществляется системой встроенного контроля, которая контролирует, как было описано ранее, режим стабилизации, а также дополнительно осуществляет контроль корректоров скорости и выходного сигнала вычислителя стабилизации скорости.
Контроль выходного сигнала вычислителя стабилизации скорости осуществляется так же, как и в режиме стабилизации высоты. Сигнал отклонения от скорости на устройство контроля подается в блоке ВКВ с контактов реле Р9 через клемму П3/2.
Для контроля корректоров скорости сигнал со щеток регулировочных сопротивлений R6 и R8 через клеммы "8" и "55" разъема ВКВ, клеммы "21" и "22" второго нижнего разъема БВК поступает на сигнализатор напряжения У60. Если сигналы корректоров одинаковы, то с клеммы "8" этот сигнал поступает на обмотку реле Р93. Реле Р93 работает точно так же, как реле Р92, работа которого была описана ранее. В работе его участвует устройства запрета У68, блок диодов У36 и цепь задержки У93. Контакты этого реле также, как и реле Р92, включают реле Р94, которое работает через устройство запрета У66. Реле срабатывает и выдает команду на клемму "4" первого верхнего разъема БВК. Включение режима производится с пульта управления ПУ-46. Предварительно включается режим стабилизации, как было описано ранее. На кнопку Кн2 ("V") через клемму "24" разъема Ш1 поступает из БВК с клеммы "26" первого верхнего разъема блока сигнал исправности режима стабилизации скорости, который с клеммы "19" разъема ВКВ подается на реле Р8 в блоках БАП и подключает выход вычислителя к входу суммирующего усилителя вычислителя автопилота.
При нажатии кнопки Кн2 команда "+27 В" через клемму "21" разъема Ш1 пульта, клемму "21" разъема Ш17 платформы и клемму "16" разъема ВКВ поступает на обмотку реле Р17 и одновременно на сбросовые обмотки реле Р16 и Р18. Реле срабатывает, замыкая свои контакты "3", "2" в цепи обмоток реле Р9 и Р10. При включении режима стабилизации обесточивается реле Р2, при этом через его контакты "1", "2" на цепи обмоток реле Р9 и Р10 поступает напряжение "+27 В", реле срабатывают и подключают сигналы к входу усилителей У1 и У6.
Отключение режима стабилизации высоты производится вручную от кнопок К60 левого и правого летчиков, от тумблера "ТАНГ." на пульте ПУ-46, от рукоятки "СПУСК-ПОДЪЕМ", при включении режимов "Глиссада" или "Уход", при управлении колонкой штурвала, а также при включении режима "Управление" в автомате тяги.
Режим отключается автоматически при его отказе системой встроенного контроля.
Отключение режима вручную и автоматически аналогично отключению режима стабилизации высоты и было рассмотрено ранее. При включении режима "Управление" в автомате тяги команда "+27 В" поступает на реле Р27 через клемму "39" разъема ВКВ и клемму "32" разъема Ш11. Реле Р27 срабатывает и отключает режим стабилизации скорости.
Д. Режим "Стабилизация числа М"
В режиме "Стабилизация числа М" стабилизируется заданное число М полета отклонением руля высоты.
Структурная схема канала тангажа в этом режиме показана на рис. 22.
В качестве датчика рассогласования  используется блок коррекции БКМЭ.
используется блок коррекции БКМЭ.
Управлявший сигнал  формируется из:
формируется из:
- позиционного сигнала с передаточным коэффициентом  , пропущенного через апериодическое звено с постоянной времени
, пропущенного через апериодическое звено с постоянной времени  ;
;
- сигнала производной с передаточным коэффициентом  и постоянной времени
и постоянной времени  ;
;
- сигнала интеграла с передаточным коэффициентом  , пропущенного через ограничение
, пропущенного через ограничение  в целях обеспечения безопасности полета.
в целях обеспечения безопасности полета.
Такой закон управления обеспечивает астатичность системы к внешним возмущениям.
Дальнейшее формирование сигнала в режиме стабилизации числа М показано на схеме рис. 17 (точка А и далее) и описано ранее.
Особенностью является дополнительное демпфирование путем увеличения передаточного коэффициента .
При полете "в болтанку" сигнал производной числа М отключается.
При включении режима "Стабилизация числа М" (см. рис. 21) отключаются режимы "Стабилизация Н" или "Стабилизация V".
Формирование управляющего сигнала в этом режиме осуществляется вычислителем ВКВ-2 так же, как в и режиме стабилизации высоты. Вместо сигнала на вход усилителя поступает сигнал отклонения от заданного числа М полета, формируемый БКМЭ системы СВС-ПН-15.
Рассмотрим работу канала тангажа в режиме стабилизации числа М по принципиальным электрическим схемам.
АБСУ в канале тангажа в режиме стабилизации числа М обеспечивает демпфирование колебаний самолета относительно оси z и стабилизирует текущее число М (в диапазоне, оговоренном техническими характеристиками).
Канал тангажа АБСУ в режиме стабилизации числа М автоматически устанавливает руль высоты в балансировочное положение.
Режим стабилизации числа М обеспечивается вычислителем автопилота и вычислителем режимов стабилизации высоты, числа М и приборной скорости.
Отработка руля высоты в балансировочное положение обеспечивается так же, как и в режиме стабилизации вычислителем автоматического триммирования с помощью исполнительного механизма МЭТ-4У.
Демпфирование колебаний самолета осуществляется демпфером тангажа. Дополнительное демпфирование в режиме стабилизации числа М осуществляется аналогично режиму стабилизации высоты.
Стабилизация числа М самолета осуществляется автопилотом автоматически при включении режима по сигналу отклонения от числа М с блока БКМЭ из состава системы СВС-ПН-15.
При отклонении самолета от текущего числа М, при котором был включен режим, сигнал, пропорциональный отклонению от числа М, снимается с блока БКМЭ по постоянному току относительно средней точки и через клемму "8" разъема Ш11 платформы поступает на клемму "9" разъема ВКВ и далее на регулировочное сопротивление R26. В блоке ВКВ сигнал со щетки регулировочного сопротивления R26 поступает через контакты реле Р11 и постоянный резистор R4 на вход усилителя У1. С выхода усилителя У1 сигнал через резистор R13 поступает на вход блока интеграла У4, через контакты реле Р10 и фильтр, образованный резисторами R23, R24 и конденсаторами С3, С6, на вход усилителя У6, через реле Р24, фильтр С2 и R22 также поступает на вход выходного усилителя У6.
С выхода блока интеграла сигнал через резистор R17 поступает на вход усилителя У6. Таким образом, на входе усилителя У6 присутствует три сигнала. Первый сигнал, проходящий через фильтр R23, R24 и СЗ, С4, пропорционален отклонению от числа М; второй сигнал, проходящий через фильтр С2, R22, пропорционален производной отклонения от числа М; третий сигнал, проходящий через резистор R17, пропорционален интегралу отклонения от скорости.
С выхода усилителя У6 сигнал поступает на вход суммирующего усилителя автопилота. С выхода суммирующего усилителя сигнал поступает на усилитель привода, шток рулевой машинки отклоняет руль высоты в сторону, необходимую для устранения отклонения от числа М. Самолет изменяет тангаж, появляющийся сигнал отклонения от тангажа с гировертикали поступает на вход суммирующего усилителя автопилота и конденсирует сигнал с вычислителя стабилизации числа М. Сигнал на выходе суммирующего усилителя становится нулевым, руль высоты устанавливается в нуль, и самолет изменяет тангаж. По мере изменения тангажа отклонение от числа М начинает уменьшаться, сигнал тангажа отклоняет руль высоты в другую сторону, заставляя самолет изменить тангаж в сторону прежнего значения. Когда самолет вернется на прежнее число М, тангаж самолета будет прежним, но изменится угол атаки самолета.
Контроль режима стабилизации числа М осуществляется системой встроенного контроля, которая контролирует, как было описано ранее, режим стабилизации, а также дополнительно осуществляет контроль выходного сигнала вычисления стабилизации числа М. Блок БКМЭ контролируется собственной системой контроля и при его исправности выдается соответствующий сигнал.
Контроль выходного сигнала вычислителя стабилизации числа М осуществляется так же, как и в режиме стабилизации высоты. Сигнал отклонения от числа М на устройство контроля подается в блоке ВКВ с контактов реле Р11 через клемму П3/4.
Сигнал исправности блока БКМЭ через клемму "16" разъема Ш11, клемму "24" второго нижнего разъема блока БВК поступает на обмотку реле Р95.
Реле Р95 работает точно так же, как реле Р92, работа которого была описана ранее. В работе участвуют устройство запрета У68, блок диодов У36 и цепь задержи У94. Контакты этого реле так же, как и реле Р92, включают реле Р94, которое работает через устройство запрета У66. Реле срабатывает и выдает команду н клемму "4" первого верхнего разъема блока БВК.
Включение режима производится с пульта управления ПУ-46. Предварительно включается режим стабилизации, как было описано ранее. Сигнал исправности режима стабилизации числа М поступает с клеммы "27" первого верхнего разъема блока БВК на кнопку Кн5 ("М") через клемму "23" разъема Ш1. Сигнал исправности вычислителя стабилизации скорости с клеммы "19" разъема ВКВ подается на реле Р8 в блоках БАП и подключает выход вычислителя к входу суммирующего усилителя вычислителя автопилота.
При нажатии кнопки Кн5 команда "+27 В" через клемму "20" разъема Ш1 пульта, клемму "20" разъема Ш17 платформы и клемму "17" разъема ВКВ поступает на обмотку реле Р18 и одновременно на сбросовые обмотки реле Р16 и Р17. Реле срабатывает, замыкает свои контакты "3", "2" в цепи обмотки реле Р10 и Р11.
При включении режима стабилизации обесточивается реле РЗ, при этом через его контакты "1", "2" на цепи обмоток реле Р10 и Р11 поступает напряжение "+27 В", реле срабатывают и подключают сигналы на вход усилителей У1 и У6.
Отключение режима стабилизации числа М вручную и автоматически полностью аналогично отключению режима стабилизации скорости и было рассмотрено ранее.
Режим "Заход на посадку"
Структурная схема канала тангажа в режиме "Заход на посадку" показана на рис. 23.
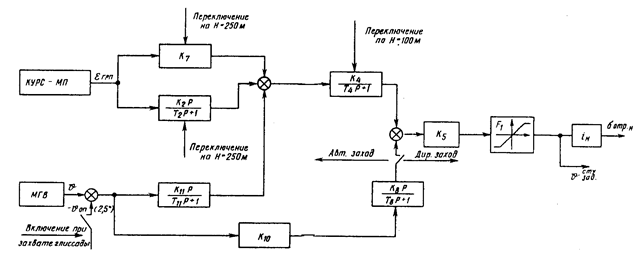
Рис.23. Структурная схема канала тангажа в режиме «Заход на посадку»
Вычислитель захода на посадку в продольной плоскости предназначен для формирования командного сигнала управления  в режимах автоматического и директорного захода на посадку. Для этого используются сигнал отклонения от зоны глиссады
в режимах автоматического и директорного захода на посадку. Для этого используются сигнал отклонения от зоны глиссады  с "Курс-МП-2" и сигнал тангажа
с "Курс-МП-2" и сигнал тангажа  с МГВ-1СК. Автоматический (директорный) заход на посадку в продольном канале начинается по команде "Захват" глиссады. Основными управляющими сигналами при движении самолета по глиссаде являются отклонение от зоны глиссады
с МГВ-1СК. Автоматический (директорный) заход на посадку в продольном канале начинается по команде "Захват" глиссады. Основными управляющими сигналами при движении самолета по глиссаде являются отклонение от зоны глиссады  и производная этого отклонения.
и производная этого отклонения.
Производная сигнала формируется на реальном дифференцирующем звене  .
.
Постоянная времени  необходима для фильтрации помех сигнала . Наличие этой постоянной времени вносит запаздывание в систему. Для компенсации запаздывания, вносимого сигналом производной , в систему вводится сигнал тангажа , пропущенный через звено
необходима для фильтрации помех сигнала . Наличие этой постоянной времени вносит запаздывание в систему. Для компенсации запаздывания, вносимого сигналом производной , в систему вводится сигнал тангажа , пропущенный через звено  .
.
Сумма рассмотренных сигналов образует сигнал заданного тангажа, который усиливается звеном  и ограничивается на звене
и ограничивается на звене  .
.
Для устранения колебания командной стрелки директорного прибора под действием радиопомех управляющий сигнал пропускается через фильтр низких частот  .
.
По мере приближения к ВПП коэффициенты  и
и  , а также постоянные времени и
, а также постоянные времени и  дискретно уменьшаются по командам от радиовысотомера "Н = 250 м" и "Н = 100 м".
дискретно уменьшаются по командам от радиовысотомера "Н = 250 м" и "Н = 100 м".
Благодаря этому устойчивость системы повышается.
В структурную схему режима автоматического захода на посадку введен сигнал  .
.
Наличие в структурной схеме указанного сигнала объясняется следующим.
Автоматический заход на посадку в зависимости от скорости, центровки и т.п. возможен с различными углами тангажа. Для исключения влияния начального тангажа сигнал текущего тангажа пропущен через звено  с большой постоянной времени.
с большой постоянной времени.
Кроме того, наличие в структурной схеме этого сигнала уменьшает статические ошибки системы.
Форсированный выход самолета на глиссаду достигается введением в структурную схему вычислителя сигнала по тангажу в момент пересечения глиссады. Для исключения дальнейшего влияния опорного сигнала он также проходит через звено .
Управляющий сигнал с выхода после усиления на звене  и ограничения на звене
и ограничения на звене  поступает на сервопривод системы управления (см. структурную схему рис. 20).
поступает на сервопривод системы управления (см. структурную схему рис. 20).
При включении режима "Заход на посадку" (рис. 24) срабатывает реле Р3, подключающее управляющий сигнал к усилителю сервопривода, одновременно с включением этого режима отключаются режимы стабилизации высоты, приборной скорости и числа М, если они были до этого включены.
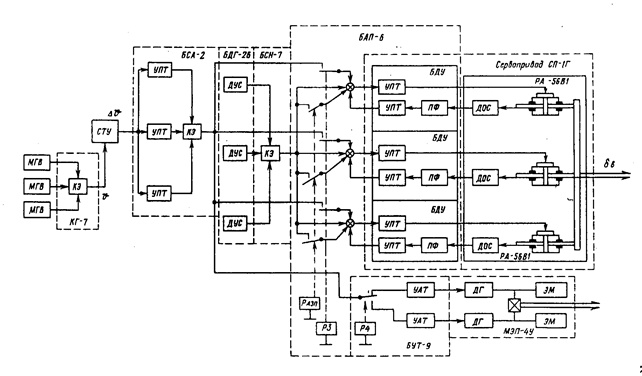
Рис.24. Функциональная схема канала тангажа в режиме «Заход на посадку»
Режим включается автоматически или вручную. Формирование управляющего сигнала  осуществляется в СТУ-154. Далее этот сигнал поступает в БНС-1-2 на три канала вычислителя, состоящих из УПТ-9 и КЭ. Сигнал усиливается на УПТ-9 и поступает на КЭ. Кворум-элемент формирует достоверный сигнал в случае выхода из строя одного из вычислителей и выдает среднеарифметический сигнал из трех сигналов при нормальной работе вычислителей. Управляющий сигнал поступает на усилитель сервопривода, на который при включении режима подается сигнал дополнительного демпфирования и
осуществляется в СТУ-154. Далее этот сигнал поступает в БНС-1-2 на три канала вычислителя, состоящих из УПТ-9 и КЭ. Сигнал усиливается на УПТ-9 и поступает на КЭ. Кворум-элемент формирует достоверный сигнал в случае выхода из строя одного из вычислителей и выдает среднеарифметический сигнал из трех сигналов при нормальной работе вычислителей. Управляющий сигнал поступает на усилитель сервопривода, на который при включении режима подается сигнал дополнительного демпфирования и  . Усилитель сервопривода вырабатывает из этих сигналов управляющий сигнал на РА-56В1, обеспечивая тем самым отклонение руля высоты и управление движением самолета в продольной плоскости при заходе на посадку.
. Усилитель сервопривода вырабатывает из этих сигналов управляющий сигнал на РА-56В1, обеспечивая тем самым отклонение руля высоты и управление движением самолета в продольной плоскости при заходе на посадку.
Сигнал СТУ-154 состоит из следующих сигналов:
(1) - сигнал, пропорциональный отклонение самолета от глиссады.
(2)  - сигнал, пропорциональный скорости отклонения самолета от глиссады ( вырабатывается только в линейной части зоны глиссадного маяка).
- сигнал, пропорциональный скорости отклонения самолета от глиссады ( вырабатывается только в линейной части зоны глиссадного маяка).
(3)  - сигнал, пропорциональный отклонению от текущего тангажа, сформированный в соответствии с законом управления.
- сигнал, пропорциональный отклонению от текущего тангажа, сформированный в соответствии с законом управления.
Самолет заходит на посадку, когда выйдет на курс посадки и пересечет ось равносигнальной зоны глиссадного маяка, одновременно срабатывает блок захвата глиссады (БЗГ) и выдает команду на автоматическое включение режима "Заход на посадку". Самолет начинает управляться по сигналам  , в результате чего руль высоты отклоняется, и самолет переходит в режим планирования. При этом обеспечивается стабилизация центра тяжести самолета относительно глиссады. В момент "захвата" глиссады в СТУ-154 вырабатывается форсированный сигнал для энергичного перевода самолета в режим планирования.
, в результате чего руль высоты отклоняется, и самолет переходит в режим планирования. При этом обеспечивается стабилизация центра тяжести самолета относительно глиссады. В момент "захвата" глиссады в СТУ-154 вырабатывается форсированный сигнал для энергичного перевода самолета в режим планирования.
По мере снижения самолета на высотах 250 м и 100 м вводятся изменения в передаточные числа для сигналов и , благодаря чему обеспечивается более стабильное движение самолета по глиссаде. На высоте 30 м летчик выключает автоматический режим, дальнейший заход на посадку и приземление выполняются экипажем вручную.
Рассмотрим работу канала тангажа в режимах директорный заход на посадку и автоматический заход на посадку по принципиальным электрическим схемам.
В директорном режиме захода на посадку АБСУ состоит из СТУ-154-2 блока БНС-1-2 и элементов САУ, обеспечивающих устойчивость и управляемость самолета.
Управление самолетом осуществляет летчик по показаниям директорной стрелки продольного движения прибора ПНП-1, удерживая ее в нулевом положении. Управляющий сигнал на директорные стрелки ПНП-1 поступает из СТУ-154 с КС-2 (Ш6 клеммы "29", "30" - на ПНП-1 лев.) и (Ш10 клеммы "29", "30" - на ПНП-1 прав.).
В формировании сигнала управления принимают участие:
(1) Сигнал углового отклонения от линии глиссады, поступающий в СТУ-154-2 (КС-2 Ш12 клеммы "10", "11" и Ш13 клеммы "10", "11") из блока БНС-1-2 (ПС-12 Ш8 клеммы "10", "11", Ш9 клеммы "10", "11"), на который этот сигнал приходит из системы "Курс-МП-2" через БКП 12Ш4 (клеммы "7", "8") и ПС-12 (Ш4 клеммы "15", "16").
(2) Сигнал текущего тангажа  , поступающий в СТУ-154-2 (КС-2 Ш12 клемма "14", Ш13 клеима "14", Ш16 клемма "14") из БНС-1-2 (ПС-12 Ш6 клемма "14", Ш9 клемма "14", Ш11 клемма "14"), на который этот сигнал приходит из блока КГ-7 (ШЗ клеммы "16", "17", "18") после кворум-элемента, воспринимающего три сигнала текущего тангажа с МГВ-1СК.
, поступающий в СТУ-154-2 (КС-2 Ш12 клемма "14", Ш13 клеима "14", Ш16 клемма "14") из БНС-1-2 (ПС-12 Ш6 клемма "14", Ш9 клемма "14", Ш11 клемма "14"), на который этот сигнал приходит из блока КГ-7 (ШЗ клеммы "16", "17", "18") после кворум-элемента, воспринимающего три сигнала текущего тангажа с МГВ-1СК.
Блок навигации и сигнализации БНС-1-2 в директорном режиме захода на посадку в продольном канале формирует следующие сигналы:
(1) Сигнал интегральной исправности продольного канала, выдаваемый на бленкер "Г" прибора ПКП-1. Этот сигнал формируется в блоке БИС-2 (Шв клемма "45", Шн клемма "45") через платформу ПС-12 (Ш8 клемма "26", Ш9 клемма "26") поступает в СТУ-154-2 на КС-2 (Ш12 клемма "26" и Ш13 клемма "26"). На ПКП-1 лев. сигнал на бленкер "Г" поступает с КС-2 (Ш8 клеммы "41", "42") и на ПКП-2 прав. с КС-2 (Ш10 клеммы "41", "42").
(2) Сигналы "Н = 250 м", "Н = 100 м", "Н = 30 м", по которым в структуре вычислителя продольного канала СТУ-154-2 производятся необходимые коммутации. Эти команды формируются в блоке БИС-2 (На клеммы "7", "8", "10") и через платформу ПС-12 (Ш8 клеммы "36", "37", "36") поступают на КС-2 (Ш13 клеммы "36", "37", "36").
(3) Сигнал предельных отклонений от линии глиссады, формируемый в блоке БИС-2 (Шн клемма "15") и через платформу ПС-12 (Ш1 клеммы "19", "42") поступающий на два табло "ПРЕДЕЛ. ГЛИСС." приборных досок левого и правого летчиков.
Работа блока БНС-1-2 по формированию перечисленных сигналов подробно описана в разд. 23 настоящего Технического описания.
Демпфер тангажа повышает степень затухания колебаний самолета относительно оси z.
Включение директорного режима захода на посадку в продольном канале производится в момент пересечения глиссады либо нажатии кнопки-лампы "ГЛИССАДА" на ПН-5, либо автоматически блоком захвата глиссады.
Дата публикования: 2015-11-01; Прочитано: 942 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
