 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Принцип действия 2 страница
|
|
Усилители срабатывают и закольцовывают привод канала крена, снимая сигнал "+27 В" с клеммы "3" устройств автоматической закольцовки. При этом выдается соответствующая сигнализация летчику, которая поступает с клеммы "10" усилителей на клемму "65" второго нижнего разъема и далее через клемму "8" разъема "21" платформы на табло отказа "ДЕМПФЕР КРЕНА" на приборной доске.
Сигнал, пропорциональный отклонению штурвала, снимаемый с индукционного датчика 45Д, расположенного в ДПС-2, через клеммы "3", "4" ("7", "8"; "11", "12") поступает на клеммы "3", "4" ("7", "8"; "11", "12") разъема Ш13 платформы.
Обмотка возбуждения датчика запитана напряжением 12 В 400 Гц через клеммы "1", "2" ("5", "6"; "9", "10") разъема Ш13 платформы и клеммы "1", "2" ("5", "6"; "9", "10") разъема датчика. С клемм "3", "4" ("7", "8"; "11", "12") разъема Ш13 сигнал поступает на вычислитель боковой управляемости через клеммы "6", "7" ("16", "17"; "26", "27") верхнего разъема блока БШУ. Вычислитель боковой управляемости состоит из преобразователя фазы (ПФ) У1 (У4, У7), усилителя постоянного тока УПТ-9 УЗ (У6, У9) и кворум-элемента, образованного тремя ограничителями тока У2, У5, У8. Сигнал переменного тока поступает на клеммы "1", "3" преобразователя У1 (У4, У7). С выхода преобразователя клемм "8", "9" сигнал постоянного тока через регулировочное сопротивление R1 (R8, R15) и резистор R3 (R10, R17) поступает на вход усилителя УЗ (У6, У9). Передаточная функция усилителя соответствует апериодическому звену с постоянной времени Тф = 0,5 с. Преобразователь фазы запитан через клеммы "6", "7" переменным напряжением 36 В 400 Гц. Усилитель постоянного тока через клеммы "2", "5" запитан постоянным напряжением ±25 В с блока питания У18 (У22, У26). Блок питания через клеммы "1", "3" запитан переменным напряжением 36 В 400 Гц.
Для компенсации ненулевых сигналов на вход усилителя с блока питания подается напряжение центровки через регулировочное сопротивление R6 (R13, R20) и резистор R7 (R14, R21).
Для исключения влияния колебания питающего напряжения напряжение центровки стабилизируется стабилитронами Д1, Д2 (ДЗ, Д4; Д5, Д6) с выхода усилителя через резистор R2 (R9, R16) сигнал поступает на вход ограничителя тока ОТ (У2) клеммы "1". Ограничители тока У2, У5, У8 образуют кворум-элемент, который осредняет электрический сигнал и, совместно с сигнализаторами напряжения У50, У51, У52, расположенными в блоке БВК, позволяют контролировать исправность подканалов вычислителя боковой управляемости.
На сигнализаторы напряжения сигнал с выхода вычислителя боковой управляемости попадает через клеммы "33" ("43", "53") верхнего разъема блока БШУ, клеммы "58", "57", "56" второго верхнего разъема блока БВК на клеммы "14" соответствующих сигнализаторов напряжения.
Выходные клеммы "2" ограничителей тока объединены между собой и выведены на клеммы "34", "44", "54", "35" верхнего разъема блока.
Осредненный сигнал с выхода вычислителя боковой управляемости подается на сигнализаторы напряжения через клемму "35" верхнего разъема БШУ, клемму "55" второго верхнего разъема БВК и клемму "12" сигнализаторе напряжения.
С клеммы "34" ("44", "54") сигнал боковой управляемости подается на усилитель привода через клемму "23" нижнего разъема блока БАП и далее через контакт реле Р18 и резистор R53.
На реле Р18 из блока контроля БВК с релейного усилителя У26 клеммы "8" через клемму "15" первого верхнего разъема блока БВК и клемму "30" нижнего разъема блока БАП поступает сигнал "+27 В исправность" вычислителя боковой управляемости.
С усилителя привода сигнал поступает на рулевой агрегат элеронов.
Шток рулевого агрегата отклоняется в сторону, соответствующую доводочному перемещению элеронов для улучшения характеристик управляемости.
Контроль вычислителя боковой управляемости, как уже указывалось выше, осуществляется системой встроенного контроля с помощью сигнализаторов напряжения, расположенных в блоке БВК.
При снятии двух из трех сигналов исправностей с клеммы "8" сигнализаторов напряжения У50, У51, У52, с клеммы "6" узла логики У12 на клемму "4" релейного усилителя У26 подается сигнал "2 отказа" вычислителя боковой управляемости. Усилитель срабатывает, снимает сигнал исправности с клеммы "8", тем самым обесточивает реле Р18 в блоках БАП. Сигнал боковой управляемости отключается от усилителя привода. При этом летчику выдается соответствующая сигнализация, которая поступает с клеммы "10" усилителя, через клемму "16" первого верхнего разъема блока БВК, клемму "13" разъема 21 платформы на табло "ОТКАЗ УПРАВД. БОК." на приборной доске.
Включение канала крена производится одновременно тумблером "САУ-СТУ" на верхнем щитке летчиков при включенных АЗС системы САУ и АБСУ, а также тремя выключателями подканалов привода канала крена на пульте бортинженера при положении "РУЧН." тумблера "РУЧН.-АВТОМ.". При этом на бленкер "КРЕН" пульта управления ПУ-46 подается сигнал "+27 В" и на поле бленкера появляется знак "^". Этот сигнал подается на бленкер с клеммы "65" нижнего разъема блока БУ-65 через клемму "13" разъема Ш18 платформы ПКА-31 и клемму "13" разъема Ш2 пульта ПУ-46. В блоке БУ-65 этот сигнал формируется по схеме "ИЛИ" из сигналов включения подканалов рулевого агрегата я проходит через нормально замкнутый контакт реле Р29.
Работа привода канала крена контролируется пультом по перемещении планки "Кр" на приборе ИН-3-2, расположенном на приборной доске летчиков.
Сигнал переменного тока с датчика траверсы рулевого агрегата крена через клеммы "З", "4" дополнительного разъема поступает на клеммы "39" и "40" разъема Ш7 платформы. Далее сигнал поступает на клеммы "26", "27" нижнего разъема блока управления БУ. В блоке управления этот сигнал поступает на клеммы "1" и "3" преобразователя сигналов У5, с выходной клеммы "8" которого через резистор R12 он поступает (относительно средней точки) на клемму "28" нижнего разъема блока. С клеммы "28" через клемму "4" разъема Ш5 платформы сигнал поступает на клемму "4" разъема индикатора ИН-3-2 и далее на рамку логометра, отклоняющего планку "Кр".
Б. Режим "Стабилизация и управление"
Канал крена в режиме "Стабилизация и управление" стабилизирует угловое положение самолета относительно продольной и вертикальной осей, а также управляет боковым движением самолета.
Структурная схема канала крена в этом режиме показана на рис. 8.
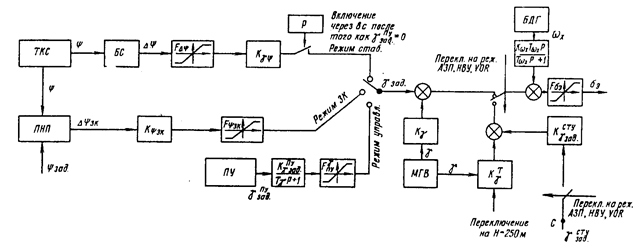
Рис.8. Структурная схема канала крена в режиме стабилизации и управления
Стабилизация и управление в боковой плоскости производятся формированием сигнала  .
.
В режиме стабилизации курса управляющий сигнал получается путем сравнения в блоке согласования текущего курса  , получаемого с точной курсовой системы ТКС и некоторым нулевым курсом, ограничения полученного сигнала
, получаемого с точной курсовой системы ТКС и некоторым нулевым курсом, ограничения полученного сигнала  (
( ) и усиления коэффициентом
) и усиления коэффициентом  .
.
В режиме заданного курса (ЗК) сигнал рассогласования  , полученный в результате сравнения на приборе ПНП текущего курса с заданным
, полученный в результате сравнения на приборе ПНП текущего курса с заданным  , усиленный коэффициентом
, усиленный коэффициентом  и ограниченный
и ограниченный  , формирует сигнал .
, формирует сигнал .
В режиме управления формируется следующим образом: сигнал  (сигнал с пульта управления) усиливается коэффициентом
(сигнал с пульта управления) усиливается коэффициентом  одновременно фильтруется фильтром
одновременно фильтруется фильтром  и ограничивается
и ограничивается  . Далее управляющий сигнал складывается с сигналом текущего крена, полученного с малогабаритной гировертикали и усиленного коэффициентом
. Далее управляющий сигнал складывается с сигналом текущего крена, полученного с малогабаритной гировертикали и усиленного коэффициентом  . Полученный сигнал
. Полученный сигнал  складывается с демпфирующим сигналом
складывается с демпфирующим сигналом  , поступающим с блока демпфирующих гироскопов через фильтр
, поступающим с блока демпфирующих гироскопов через фильтр  с коэффициентом усиления
с коэффициентом усиления  . Суммарный сигнал ограничивается ограничителем
. Суммарный сигнал ограничивается ограничителем  .
.
Канал крена (см. рис. 9) состоит из демпфера колебаний, датчиков САУ-154-2, вычислителя бокового канала САУ-154-2 и элементов связи с курсовой системой. Работа демпфера крена в режиме "Стабилизация и управление" не отличается от работы его в режиме "Штурвальное управление".
Канал крена работает, когда при возникновении крена и связанного с ним изменения курса чувствительные элементы ТКС-П2, МГВ-1СК вырабатывают электрические сигналы курса и крена  .
.
Вычислитель САУ-154-2 предназначен для формирования управлявшего сигнала канала при автоматическом пилотировании и состоит из трех параллельно и одновременно работающих подканалов. Подканал вычислителя САУ-154-2 состоит из УПТ-9 и схемы ограничения сигнала. На вход каждого усилителя УПТ-9 непрерывно поступает сигнал текущего крена и, в зависимости от режима работы канала, один из трех сигналов: сигнал заданного крена , сигнал отклонения от стабилизируемого курса или сигнал отклонения от заданного курса.
Сигнал текущего крена снимается с трех гировертикалей МГВ-1СК и формируется с КЭ, расположенным в коммутаторе гиродатчиков КГ-7. Кворум-элемент позволяет получить достоверный сигнал текущего крена в случае отказа одной гировертикали. При нормальной работе гировертикалей сигнал текущего крена с выхода КЭ представляет собой среднеарифметическое значение сигнала крена, поступающего на него с МГВ-1СК. Далее этот сигнал поступает на УПТ-9 каждого из трех подканалов вычислителя бокового канала САУ-154-2, расположенных в блоках БАП-6 автопилота. Сигнал отклонения самолета от стабилизируемого курса формируется блоком связи БС-1, установленным в блоке БСН-7 (см. рис. 10).
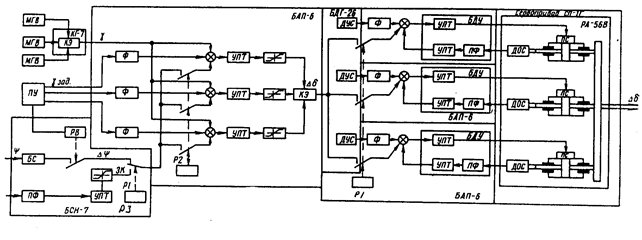
Рис.9. Функциональная схема канала крена в режиме стабилизации и управления
Сигнал текущего курса подается на статор сельсина-приемника (С-П) с сельсина-датчика (С-Д), установленного на гироагрегате курсовой системы ТКС-П2. При включении САУ-154-2 следящая система устанавливает ротор сельсина С-П в положение, при котором сигнал на выходе сельсина С-П равен нулю (на рис. 10 контакт Р в нижнем положении). При включении режима стабилизации следящая система отключается (контакт Р в верхнем положении), ротор сельсина С-П стопорится электромагнитной муфтой. При этом с выхода сельсина С-П снимается сигнал , пропорциональный отклонению самолета от курса, который имел самолет перед включением этого режима. Этот сигнал также поступает на УПТ-9 каждого из трех подканалов вычислителя САУ-154-2.
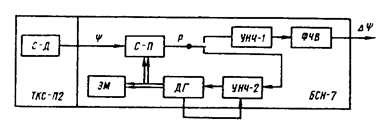
Рис. 10. Функциональная схема блока связи с курсовой системой
Оба сигнала ( и ) алгебраически складываются, а образующаяся разность усиливается по величине и мощности, ограничивается и поступает на КЭ. Кворум-элемент вырабатывает достоверный сигнал из трех поступающих на него сигналов . При включении режима стабилизации в БАП-6 срабатывают реле Р1 и Р2 (см. рис. 9) и подключают сигнал с выхода БС-1 (Р2) и управляющий сигнал (Р1) на вход усилителя сервопривода, который передает его в виде управляющего сигнала на вход РА-56В1. Рулевой агрегат отклоняет элероны. Самолет начинает разворачиваться и восстанавливает стабилизируемый курс, а затем крен.
ПРИМЕЧАНИЕ: В восстановлении курса участвует не только канал крена, но и канал курса, так как при отклонении самолета по курсу вырабатывается сигнал угловой скорости относительно вертикальной оси.
Управление боковым движением самолета через САУ-154-2 осуществляется рукояткой управления разворот на ПУ-46 или кремальерой ЗК на навигационно-плановых приборах.
Датчиком управляющих сигналов является строенный потенциометр, установленный в ПУ-46, щетки которого перемещаются при повороте рукоятки управления "РАЗВОРОТ".
При повороте рукоятки управления "РАЗВОРОТ" сигнал, пропорциональный углу поворота , поступает на вход УПТ-9 каждого из трех подканалов вычислителя САУ-154-2. В вычислителе САУ-154-2 этот сигнал усиливается по величине и мощности, ограничивается и производится его осреднение на КЭ. Далее этот сигнал поступает на усилитель сервопривода, который передает его на РА-56В1 а виде управляющего сигнала. Это вызывает отклонение элеронов, и самолет входит в крен. Одновременно реле Р2 (см. рис. 8) отключает сигнал от вычислителя САУ-154-2, а блок БС-1 переводится в режим отслеживания текущего курса. При повороте самолета по крену с МГВ-1СК поступает сигнал , пропорциональный углу крена самолета и противоположный по знаку управлявшему сигналу . Когда самолет отклонится на угол крена, при котором сигнал МГВ скомпенсирует управляющий сигнал займут нейтральное положение, угол крена самолета перестанет расти и станет пропорциональным углу поворота рукоятки управления "РАЗВОРОТ".
Для вывода самолета в прямолинейный полет рукоятка управления "РАЗВОРОТ" устанавливается в исходное положение, физические процессы при этом будут протекать в обратном порядке. Одновременно включается реле времени РВ, установленное в блоке БСН-7, которое по истечении времени задержки подключит управляющий сигнал к вычислителю САУ-154-2. Время задержки необходимо для приведения самолета к нулевому значению крена.
В режиме управления от кремальеры ЗК на навигационно-плановом приборе (см. рис. 11) контакт реле РЗ находится в положении  ЗК.
ЗК.
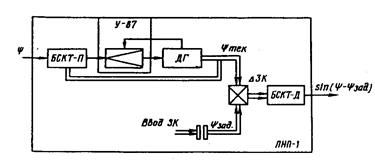
Рис.11. Функциональная схема канала ЗК ПНП
При этом с прибора ПНП-1 в САУ-154-2 будет поступать сигнал, пропорциональный синусу разности углов текущего и заданного курсов, который, в своп очередь, пропорционален углу поворота кремальеры ЗК. Этот сигнал переменного тока в виде ЗК (см. рис. 9) поступает на фазочувствителъный выпрямитель ПФ, затем на УПТ-9, расположенные в блоке БСН-7. Аналогично управлению по крену от рукоятки "РАЗВОРОТ" сигнал с УПТ-9, ограниченный величиной 20° крена, поступает на вычислитель САУ-154-2 и далее на усилитель сервопривода. Это вызовет отклонение элеронов, под действием которых самолет войдет в крен.
При повороте самолета по крену с МГВ-1СК поступает сигнал , пропорциональный углу крена самолета и противоположный по знаку управляющему сигналу ЗК. Когда самолет отклонится на угол крена, при котором сигнал с МГВ скомпенсирует управляющий сигнал ЗК, элероны займут нейтральное положение, угол крена самолета перестанет расти, и самолет будет разворачиваться на курс, заданный кремальерой ЗК. По мере приближения к заданному курсу сигнал ДЗК непрерывно уменьшается, поэтому самолет будет выходить из крена и в момент выхода на заданный курс будет иметь нулевой крен.
Переключение управления кремальерой ЗК левого или правого навигационно-планового прибора осуществляется переключателем ЗК на приборной доске левого летчика.
Рассмотрим работу канала крена в режиме "Стабилизация и управление" по принципиальным электрическим схемам.
АБСУ в канале крена в режиме стабилизации обеспечивает демпфирование колебаний самолета вокруг продольной оси, стабилизирует угловое положение самолета относительно продольной и вертикальной осей, а также управляет боковым движением самолета от рукоятки "РАЗВОРОТ" пульта управления.
Канал крена АБСУ обеспечивает стабилизацию и управление заданным курсом, устанавливаемым на приборе ПНП-1.
Канал крена АБСУ состоит из вычислителя автопилота и вычислителя курса, который в свою очередь состоит из вычислителя текущего курса и вычислителя заданного курса.
Исполнительным механизмом автопилота является сервопривод СП-1Г элеронов, работу которого рассматривали в режиме штурвального управления.
Демпфирование колебаний самолета осуществляется демпфером крена, работа которого в автоматическом режиме аналогична работе его в режиме штурвального управления.
Стабилизация самолета по крену и курсу осуществляется автоматически при включении автопилота (режима стабилизации) по сигналам с гировертикали МГВ-1СК и точной курсовой системы ТКС-П2.
При отклонении самолета по крену сигнал, пропорциональный углу крена, снимается со щетки потенциометра гировертикали МГВ-1СК относительно средней точки и через клемму "17" разъема Ш1 МГВ поступает на блок КГ-7 разъема Ш1 (Ш3, Ш5) клемму "17". Питание ±12,5 В на потенциометры МГВ поступает с блока питания БПД У1 (У2, УЗ) через клеммы "14", "15" разъема Ш1 (Ш3, Ш5) блока КГ-7 и клеммы "14", "15" разъема Ш1 гировертикали МГВ-1СК. Блоки питания через клеммы "1", "3" запитаны переменным напряжением 36 В 400 Гц.
С разъема Ш1 сигнал крена поступает на сигнализатор напряжения У20 (У21, У22) клемм "13", "14". С клеммы "16" У20 сигнал поступает на клемму "1" ограничителя тока У17 (У18, У19). Ограничители тока У17, У18, У19 образуют кворум-элемент, который осредняет электрический сигнал и совместно с сигнализаторами напряжения У20, У21, У22 позволяет контролировать исправность (достоверность) этого сигнала в каждом подканале.
Выходные клеммы "2" ограничителей тока объединены между собой, соединены с клеммой "12" сигнализаторов напряжения и выведены на клеммы "5", "45", "46" разъема Ш8 блока.
С клеммы "5" ("45", "46") разъема Ш8 осредненный сигнал крена поступает через клемму "5" ("45", "46") разъема Ш1 платформы ПКА-31 на клемму "12" нижнего разъема блока БАП. В блоке сигнал через регулировочное сопротивление R39 и резистор R40 поступает на вход суммирующего усилителя У6. Суммирующий усилитель У6 с выходными цепями является вычислителем автопилота. Усилитель через клеммы "2" и "5" запитан постоянным напряжением ±25 В от блока питания У7, который запитывает усилитель привода У10 канала крена.
С выхода усилителя У6 (клемма "1") через резистор R84 сигнал поступает на вход ограничителя тока У9 (клемма "1"). Максимальный выходной сигнал усилителя ограничивается микросхемами У15 и У16, а регулировочное сопротивление R84 позволяет регулировать этот сигнал. Ограничители тока У9, расположенные в блоках БАП, образуют кворум-элемент, который осредняет электрический сигнал с выхода суммирующего усилителя канала крена и совместно с сигнализаторами напряжения У53, У54, У55, расположенными в блоке БВК, позволяет контролировать исправность подканалов вычислителя автопилота канала крена. На сигнализаторы напряжения сигнал с выхода вычислителя автопилота канала крена поступает через клеммы "10" нижнего разъема блока БАП, клеммы "63" ("64", "65") второго верхнего разъема блока БВК и далее на клемму "14" соответствующих сигнализаторов.
Выходные клеммы "2" ограничителей тока У9 выведены на клемму "21" нижнего разъема блока БАП и соединены между собой.
Осредненный сигнал с выхода вычислителя автопилота канала крена подается на сигнализаторы напряжения через клемму "62" второго верхнего разъема БНК и клемму "12" сигнализатора.
С выхода ограничителя тока У9 сигнал вычислителя автопилота подается на вход усилителя привода через резистор R47 и контакты реле Р19. На обмотку реле Р19 при включении автоматического режима подается команда "+27 В", реле срабатывает и подключает сигнал вычислителя автопилота к усилителю привода. С усилителя привода сигнал поступает на рулевой агрегат крена, при этом шток рулевого агрегата для устранения появившегося угла крена отклоняется в сторону, соответствующую отклонению элеронов.
Контроль режима стабилизации крена осуществляется системой встроенного контроля с помощью сигнализаторов напряжения блока КГ-7 (У20, У21, У22) и блока БВК (У53, У54, У55).
При снятии двух из трех сигналов исправности на клемме "8" сигнализаторов напряжения У20, У21, У22 с клеммы "6" узла логики У23 поступает сигнал "2 отказа МГВ " на клемму "1" разъема Ш8 блока КГ-7. Этот сигнал через клемму "1" разъема Ш1 платформы и клемму "17" первого верхнего разъема БВК поступает на клемму "4" релейных усилителей У27 и У28, которые запитаны через клемму "1" и "6" первым отказом МГВ.
Усилители срабатывают и через клемму "13" посылают импульс отключения автоматики на реле бокового канала в блоке управления. Этот сигнал поступает через клеммы "20" первого верхнего разъема БВК и клемму "31" верхнего разъема БУ-65 на сбросовые обмотки реле Р32 и РЗЗ. Реле срабатывают, и отключается режим стабилизации в боковом канале. Одновременно импульс поступает на реле Р72 в блоке БВК, через контакты "8", "9" которого и клемму "22" первого верхнего разъема БВК выдается сигнал на включение звуковой и световой сигнализации.
Аналогично релейные усилители У27 и У28 срабатывают при поступлении отказа с узлов логики У13 и У14 при снятии двух из трех сигналов исправностей сигнализаторов напряжения У53, У54, У55, контролирующих вычислитель автопилота. При отказе штурвального режима эти усилители также срабатывают.
Включение режима стабилизации производится с пульта управления ПУ-46. Для подготовки включения тумблер "КРЕН" устанавливается в положение "ВКЛ.", при этом через клеммы "6" и "8" разъема Ш1 блока и разъема Ш17 платформы команда "+27 В" поступает на клеммы "44" и "45" верхнего разъема блока БУ-65 и далее на контакты "3" реле Р32 и Р33, и одновременно на обмотки реле Р27 и Р28. Последние срабатывают и подготавливают своими контактами цепи обмоток реле Р32 и Р33 к включению. Для включения стабилизации необходимо, чтобы рукоятка "РАЗВОРОТ" находилась в среднем положении. При этом через клеммы "30" и "33" разъема Ш1 и разъема Ш17 платформы команда "+27 В" поступает на клемму "21" верхнего разъема блока управления БУ-65 и далее на обмотки реле Р22 и Р23. Реле срабатывают и своими контактами подготавливают цепи обмоток реле Р32 и Р33 к включению. Сигнал исправности режима стабилизации бокового канала с релейного усилителя У28 блока БВК поступает через клемму "18" первого верхнего разъема блока и клемму "25" верхнего разъема блоки БУ-65 на обмотки реле Р19 и Р20. Реле срабатывают и своими контактами подготавливают цепи обмоток реле Р32 и Р33 к включению. При нажатии кнопки "СТАБ." на пульте управления ПУ-46 команда "+27 В" поступает на блок управления по двум цепям через клеммы "4" и "5" разъема Ш1 пульта, клеммы "4" и "5" разъема Ш17 платформы и клеммы "59" и "60" верхнего разъема блока БУ-65.
В блоке БУ-65 эта команда по двум цепям через контакты реле Р22 и Р23, Р19 и Р20, Р27 и Р28 поступает на обмотки реле Р32 и Р33. Последние представляют собой дистанционные переключатели, которые при поступлении команды "+27 В" срабатывают и замыкают свои контакты "2" и "3" и оставляют их в замкнутом состоянии после снятия команды "+27 В".
Команда "+27 В" от тумблера "КРЕН" при срабатывании реле Р32 и Р33 поступает на клеммы "46" и "47" верхнего разъема блока и далее через клемму "37" блоков БАП-6 на обмотку реле Р19. Реле срабатывает и подключает сигнал с вычислителя автопилота бокового канала к приводу.
Отключение режима производится либо вручную от кнопок КБО, тумблера "КРЕН" или при управлении штурвалом, либо автоматически при отказе системой встроенного контроля.
Сигнал от кнопок КБО (левого и правого летчиков) поступает на блок управления (клеммы "42" и "61") верхнего разъема и далее на обмотки реле Р21, Р24, Р42, Р43. Реле срабатывают и через контакты "2" и "3" реле Р21 и Р43 команда "+27 В" поступает на сбросовые обмотки реле Р32 и Р33, которые срабатывают и разрывают контакты "2" и "З", при этом команда включения режима стабилизации снимается с клемм "46" и "47" блока управления.
Дата публикования: 2015-11-01; Прочитано: 1186 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
