 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Принцип действия 4 страница
|
|
При больших значениях  в систему подаются сумма сигналов
в систему подаются сумма сигналов  и
и 
 , ограниченная звеном
, ограниченная звеном  , а также сигнал
, а также сигнал  . Под действием этого сигнала самолет приобретает крен и разворачивается в сторону ВПП.
. Под действием этого сигнала самолет приобретает крен и разворачивается в сторону ВПП.
Разворот происходит до тех пор, пока сигнал не сравняется с суммой сигналов, ограниченной звеном .
После этого движение самолета происходит с постоянным курсом до момента линейного изменения сигнала . При входе в линейную зону радиомаяка появляется сигнал производной  и самолет начинает плавно подходить к курсовой линии. Значение при этом достаточно мало и сигнал компенсируется сигналом .
и самолет начинает плавно подходить к курсовой линии. Значение при этом достаточно мало и сигнал компенсируется сигналом .
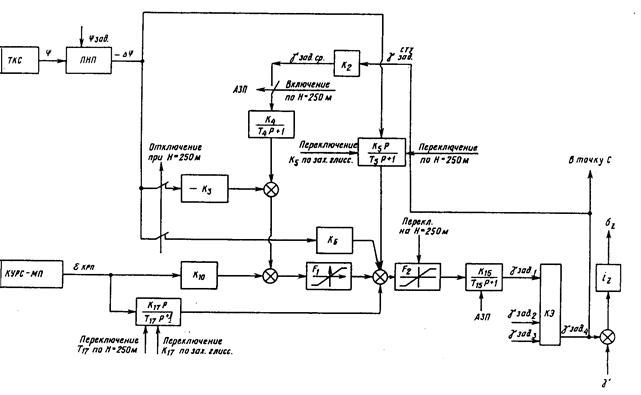
Рис.15. Структурная схема канала крена в режиме «Заход на посадку»
Таким образом, основными управляющими сигналами на данном участке являются отклонения от курсовой линии и производная этого отклонения.
Производная сигнала формируется на реальном дифференцирующем звене  .
.
Постоянная времени  необходима для фильтрации помех сигнала . Наличие этой постоянной времени вносит запаздывание в систему.
необходима для фильтрации помех сигнала . Наличие этой постоянной времени вносит запаздывание в систему.
Для компенсации запаздывания, вносимого сигналом производной , в систему вводится сигнал , пропущенный через звено  .
.
Сумма рассмотренных сигналов образует сигнал заданного крена, который ограничивается звеном  . По мере приближения к ВПП (на высоте 250 м) величина ограничения дискретно уменьшается. Величина зоны насыщения выбрана в соответствии с требованиями безопасности режима автоматического (директорного) захода на посадку.
. По мере приближения к ВПП (на высоте 250 м) величина ограничения дискретно уменьшается. Величина зоны насыщения выбрана в соответствии с требованиями безопасности режима автоматического (директорного) захода на посадку.
Для устранения колебания командной стрелки директорного прибора под действием радиопомех управляющий сигнал  пропускается через фильтр низких частот
пропускается через фильтр низких частот  .
.
В автоматическом режиме постоянная времени фильтра снижается.
По мере приближения к ВПП коэффициенты  и
и  , а также постоянные времени
, а также постоянные времени  и дискретно уменьшаются соответственно по командам "Захват глиссады" и "Н = 250 м". Благодаря этому устойчивость системы повышается.
и дискретно уменьшаются соответственно по командам "Захват глиссады" и "Н = 250 м". Благодаря этому устойчивость системы повышается.
Статические ошибки системы, например, от не симметрии тяги двигателей, неточности установки крыльев, погрешностей при установке гировертикали и т.п., устраняются введением в структурную схему автоматического режима захода на посадку звеньев  и
и  .
.
С помощью звена образуется положительная обратная связь по сигналу  .
.
Далее сигнал проходит через инерционное звено с большой постоянной времени.
Такая связь придает контуру интегрирующие свойства.
Управляющий сигнал с каждого канала поступает на кворум-элемент и далее осредненный сигнал - на сервопривод системы управления (см. структурную схему рис. 5, точка С и далее).
Повышение устойчивости достигается также дискретным увеличением коэффициента  по команде "Н = 250 м".
по команде "Н = 250 м".
Как и в предыдущих режимах, при включении режима "Заход на посадку" (см. рис. 16) срабатывают реле Р1 и Р2, и формирование управляющего сигнала  осуществляется в блоке БНС-1-2. В этом режиме канал курса работает как демпфер, а управляющее воздействие формируется в канале элеронов.
осуществляется в блоке БНС-1-2. В этом режиме канал курса работает как демпфер, а управляющее воздействие формируется в канале элеронов.
Сигнал, пропорциональный отклонению самолета от курсовой линии поступает от системы "Курс-МП-2" на три вычислителя бокового канала системы траекторного управления. Кроме того, на каждый вычислитель подается сигнал "  ", сформированный на приборах ПНП-1. Каждый вычислитель из поступивших сигналов формирует сигнал подается в блок контроля бокового движения. На кворум-элементе блока контроля формируется достоверный сигнал из сигналов трех вычислителей. Сигнал подается в систему автоматического управления САУ-154-2 в качестве управляющего сигнала. Сигнал суммируется на трех усилителях УПТ-9 в БСА-2 блока БНС-1-2 с сигналом крена от МГВ-1СК. Сигнал крена предварительно проходит через КЭ, где вырабатывается достоверный сигнал из трех текущих значений.
", сформированный на приборах ПНП-1. Каждый вычислитель из поступивших сигналов формирует сигнал подается в блок контроля бокового движения. На кворум-элементе блока контроля формируется достоверный сигнал из сигналов трех вычислителей. Сигнал подается в систему автоматического управления САУ-154-2 в качестве управляющего сигнала. Сигнал суммируется на трех усилителях УПТ-9 в БСА-2 блока БНС-1-2 с сигналом крена от МГВ-1СК. Сигнал крена предварительно проходит через КЭ, где вырабатывается достоверный сигнал из трех текущих значений.
Образующийся на усилителе УПТ-9 управляющий сигнал подается на усилитель сервопривода. Таким образом, обеспечивается отклонение элеронов и управление движением самолета в боковой плоскости при заходе на посадку. Сигнал СТУ-154-2 состоит из следующих сигналов:
(1) - сигнал отклонения самолета от курса взлетно-посадочной полосы ВПП.
(2) - сигнал, пропорциональный отклонению самолета от оси равносигнальной зоны.
(3) - сигнал, пропорциональный скорости отклонения самолета от оси равносигнальной зоны. Сигнал вырабатывается только в линейной части зоны курсового маяка.
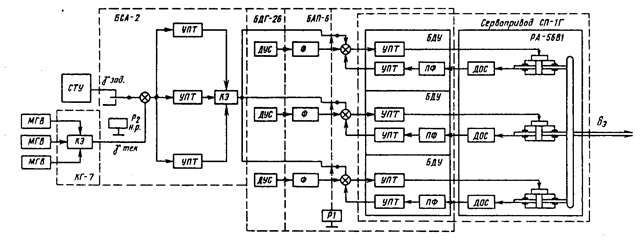
Рис.16. Функциональная схема канала крена в режиме «Заход на посадку»
Кроме того, сигнал сравнивается в блоке контроля с сигналом текущего крена  и формирует управляющий сигнал
и формирует управляющий сигнал  на командные стрелки приборов ПКП-1.
на командные стрелки приборов ПКП-1.
Самолет заходит на посадку следующим образом.
В начале четвертого разворота сигнал определяется сигналом , так как в этот момент значительно меньше . Под действием сигнала самолет входит в координированный разворот в сторону ВПП. В процессе разворота сигнал уменьшается и становится соизмеримым с . Так как сигналы и имеют противоположные знаки, сигнал уменьшается, и самолет постепенно выходит яз крена. Когда становится равным ,  самолет переходит в прямолинейный полет с постоянным значением
самолет переходит в прямолинейный полет с постоянным значением  , которое определяется максимальным значением . При входе самолета в линейную часть зоны курсового маяка сигнал уменьшается. При этом сигнал вновь становится больше текущего значения и самолет снова входит в координированный разворот в сторону ВПП.
, которое определяется максимальным значением . При входе самолета в линейную часть зоны курсового маяка сигнал уменьшается. При этом сигнал вновь становится больше текущего значения и самолет снова входит в координированный разворот в сторону ВПП.
Вследствие уменьшения сигнала в СТУ-154 вырабатывается сигнал , который способствует выполнению разворота и в дальнейшем стабилизирует движение самолета на оси равносигнальной зоны курсового маяка. При "захвате" глиссады сигнал исключается из управления, и дальнейшее управление осуществляется по сигналам и , под действием которых АБСУ-154-2 удерживает самолет вдоль оси ВПП. В связи с тем что по мере приближения к радиомаяку увеличивается крутизна сигнала зоны курса , введено переключение коэффициентов в вычислителе бокового канала САУ-154-2 по сигналам радиовысотомера.
Рассмотрим работу канала крена в режимах "Директорный заход на посадку" и "Автоматический заход на посадку" по принципиальным электрическим схемам. В директорном режиме захода на посадку АБСУ состоит га системы траекторного управления СТУ-154, блока навигации сигнализации БНС-1-2 элементов САУ-154-2, обеспечивающих устойчивость и управляемость самолета. Управление самолетом осуществляет летчик по показаниям директорной стрелки бокового движения прибора ПКП-1, удерживая ее в нулевом положении. Сигнал управления на директорную стрелку ПКП-1 поступает из СТУ с КС-2 (с Ш8 клеммы "27", "28" - на ПКП-1 лев., с Ш10 клеммы "27", "28" на ПКП-1 прав.).
В формирования сигнала управления используются:
(1) Сигнал углового отклонения от курсовой линии, поступающий в СТУ-154 (КС-2 Ш12 клеммы "8", "9" и Ш13 клеммы "8", "9") из БНС-1-2 (ПС-12 Ш8 клеммы "8", "9" и Ш9 клеммы "8", "9"), на который этот сигнал приходит из системы "Курс-МП-2" через 12Ш4 БКП (клеммы "3", "4") и ПС-12 (Ш4 клеммы "13", "14").
(2) Сигнал текущего крена, поступающий в СТУ-154 (КС-2 Ш12 клемма "12", Ш13 клемма "12") из БНС-1-2 (ПС-12 Ш8 клемма "12", Ш9 клемма "12"), на который этот сигнал приходят из блока КГ-7 (ШЗ клеммы "13", "14", "15" ПС-12) после кворум-элемента, воспринимающего три сигнала текущего крена с МГВ-1СК.
(3) Сигнал разности заданного путевого угла (курса посадки) и текущего курса.
Этот сигнал формируется на ПНП-1 из сигнала курса, получаемого от ТКС-П2 и сигнала ЗПУ, задаваемого летчиком в режиме захода на посадку вручную с помощью кремальеры на левом или правом ПНП-1. На платформу КС-2 с ПНП-1 лев. поступает на ШЗ (клеммы "2", "6") и с ПНП-1 прав. на Ш6 (клеммы "2", "6").
Работа СТУ-154 по формированию сигнала управления и выдачи его на директорные стрелки ПКП-1 изложена в техническом описании системы СТУ-154.
Блох навигация и сигнализации БНС-1-2 в директорном режиме захода на посадку в боковом канале формирует следующие сигналы:
(1) Сигнал интегральной исправности бокового канала, выдаваемый на бленкер "К" прибора ПКП-1. Этот сигнал формируется в блоке БНС-2 (Шв клемма "37" и Шн клемма "37") и через платформу ПС-12 (Ш12 клемма "25" и Ш9 клемма "25") поступает в СТУ-154 на КС-2 (Ш12 клемма "25") для ПКП-1 лев. и Ш13 клемма "25" для ПКП-1 прав.
(2) Сигнал Н = 250 м, по которому в структуре вычислителя бокового канала СТУ-154 производятся необходимые коммутации. Этот сигнал формируется в блоке БНС-2 (Шв клемма "7") и через платформу ПС-12 (Ш9 клемма "36") поступает на КС-2 (Ш13 клемма "36").
(3) Сигнал предельных отклонений от линии курса, формируемый в блоке БНС-2 (Шв клемма "15") и через платформу ПС-12 (Ш1 клеммы "18" и "41") поступающий на 2 табло "ПРЕДЕЛ КУРСА" приборных досок левого и правого летчиков.
Работа БНС-1-2 по формирование перечисленных сигналов подробно описана в п. 5.23 настоящего Технического описания.
Демпферы крена и курса повышают степень затухания колебаний самолета вокруг осей X, У. Работа демпферов описана в п. 2.3.1 настоящего Технического описания.
Включение директорного режима захода на посадку в боковом канале производится кнопкой-лампой "ЗАХОД" на приставке ПН-5. Команда "Вкл. зах." с Ш1 клеммы "20" ПН-5 поступает в блок БНС-1-2 на ПС-12 (ШЗ клемма "31") и в СТУ-154. С Ш9 клемма "22" ПС-12 команда поступает на Ш13 клемму "22" КС-2 для осуществления необходимых коммутаций.
В автоматическом режиме захода на посадку АБСУ состоит из системы траекторного управления СТУ-154, блока навигации и сигнализации БНС-1-2, и элементов САУ, обеспечивающих автоматический полет в боковой плоскости и демпфирование по крену и курсу. Сигнал управления, формируемый в СТУ, поступает на директорные стрелки бокового движения приборов ПКП-1, как и при работе в директорном режиме. Кроме того, аналогичный сигнал подается на сервопривод автопилота. Формирование сигнала на сервопривод осуществляется в блоке БСА-2. Сигнал заданного крена поступает с платформы КС-2 СТУ (Ш2 клемма "16") в блок БНС-1-2 на ПС-12 (Ш8 клемма "16"), проходит в блок БСА-2 (Ш1 клеммы "3", "11", "17") и через резистор RЗ подается на вход усилителя У2, где алгебраически суммируется с сигналом текущего крена, который через резистор R7 также поступает на вход усилителя У2. Сигнал текущего крена в БСА-2 (Ш1 клеммы "6", "42", "41") приходит через платформу ПС-12 БНС-1-2 (ШЗ клеммы "13", "14", "15") из блока КГ-7 (Ш9 клеммы "22", "23", "24").
Сигнал разности с выхода усилителя У2 осредняется на кворум-элементе и из блока БСА-2 (Ш1 клеммы "8", "14", "2") направляется через платформу ПС-12 блока БНС-1-2 (Ш2 клеммы "27", "28". "29") в платформу САУ ПКА-31 (Ш9 клеммы "1", "2", "3") и далее в БАП-6 (Шн клемма "14") на вход сервопривода.
Включение автоматического режима захода на посадку в боковом канале производится нажатием кнопки-лампы "ЗАХОД" на приставке ПН-5 и кнопки "СТАБ." на пульте ПУ-46. При этом "Команда вкл. зах." с приставки ПН-5 (Ш1 клемма "20") через платформу ПС-12 (Ш3 клемма "31") поступает в блок БИС-2 (Шв клемма "25" и Шн клемма "25"), а через ПКА-31 (Ш9 клемма "10" и Ш10 клемма "8") в блок БИС-2 (Шв клемма "24" и Шн клемма "24") подается сигнал "Вкл. автом. ред.". В результате в блоке БИС-2 производится формирование сигнала "Готовн. зах.", который из БИС-2 (Шв клемма "40", Шн клемма "40"), платформу ПС-12 (1112 клемма "II") поступает на ПКА-31 (1119 клемма "7") и дальше в блок БУ-65 (Шв клемма "23"), в котором формируется команда "Вкл. СТУ бок." (Шв клемма "48"). Эта команда приходит в БАП-6 (Ин клемма "32") и включает реле Р17, которое своими контактами подключает сигнал управления к входу сервопривода.
Е. Режим "Уход на второй круг"
При уходе на второй круг канал крена работает в режиме стабилизации курса.
2.3.3. Канал тангажа
Канал тангажа стабилизирует угловое положение самолета относительно поперечной оси, управляет продольным движением самолета, а также улучшает характеристики устойчивости и управляемости самолета по тангажу при ручном пилотировании.
Канал тангажа работает в режимах: "Штурвальное управление", "Стабилизация и управление", "Стабилизация высоты", "Стабилизация приборной скорости", "Стабилизация числа М", "Заход на посадку", "Уход на второй круг".
А. Режим "Штурвальное управление"
Канал тангажа в режиме "Штурвальное управление" демпфирует колебания самолета в полете вокруг поперечной оси и обеспечивает требуемые характеристики управляемости самолета по тангажу при ручном пилотировании во всем диапазоне эксплуатационных весов и центровок самолета.
Структурная схема канала тангажа в режиме "Штурвальное управление" показана на рис. 17.
В канале тангажа сервопривод отклоняет руль высоты на величину  , ограниченную значением
, ограниченную значением  . Сервопривод отклоняется по сумме сигналов:
. Сервопривод отклоняется по сумме сигналов:
сигнала демпфирования с передаточным коэффициентом  и сигнала управляемости. Сигнал угловой скорости
и сигнала управляемости. Сигнал угловой скорости  поступает с БДГ-26.
поступает с БДГ-26.
Сигнал управляемости представляется в виде произведения двух сигналов 
 .
.
Сигнал пропорционален отклонению колонки от стриммированного положения. Датчиком этого сигнала является ДПС-2.
Сигнал пропорционален сумме сигналов  и
и  . Величина формируется с помощью датчика ДПС-4, установленного на механизме эффекта триммирования. Значение принято постоянным.
. Величина формируется с помощью датчика ДПС-4, установленного на механизме эффекта триммирования. Значение принято постоянным.
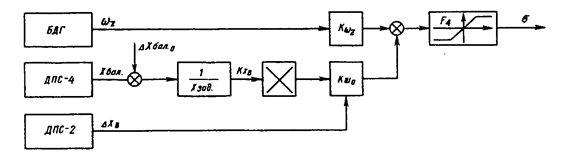
Рис.17. Структурная схема канала тангажа в режиме «Штурвальное управление»
Величины  и
и  также постоянны и служат для приведения размерности сигнала управляемости к градусам отклонения руля высоты.
также постоянны и служат для приведения размерности сигнала управляемости к градусам отклонения руля высоты.
Исполнительным механизмом канала тангажа (см. рис. 18) является РА-56В1, входящий в состав сервопривода СП-1Г. Работа его аналогична работе сервопривода в каналах курса и крена. Перемещение штока каждого подканала пропорционально величине управляющего сигнала.
При возникновении колебаний самолета вокруг поперечной оси блок БДГ-26 канала тангажа вырабатывает электрический сигнал, пропорциональный возникающей угловой скорости. Этот сигнал поступает на КЭ, расположенный в блоке БСН-7. Кворум-элемент позволяет получить достоверный сигнал угловой скорости тангажа при отказе одного ДУС блока ВДГ-26. При нормальной работе ДУС сигнал на выходе КЭ представляет собой среднеарифметическое значение сигнала угловой скорости тангажа, поступающего на него с ДУС. Далее этот сигнал поступает на вход усилителя сервопривода. На усилителе сервопривода он алгебраически суммируется с сигналом управляемости и сигналом отрицательной обратной связи. Алгебраическая сумма этих трех сигналов представляет собой управляющий сигнал в канале тангажа.
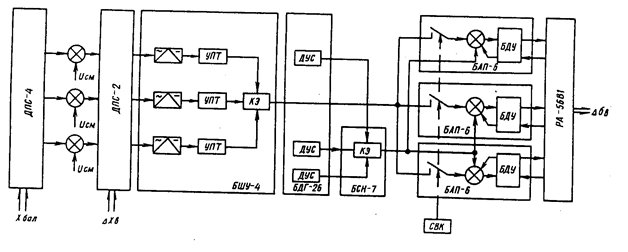
Рис.18. Функциональная схема канала тангажа в режиме «Штурвальное управление»
Сигнал управляемости формируется строенными датчиками положения ДПС-4 и ДПС-2 и вычислителем продольной управляемости БШУ-4.
Датчик положения ДПС-4 вырабатывает электрический сигнал , пропорциональный положению колонки штурвала, соответствующему балансировочному положению руля высоты. Этот сигнал питает статорную обмотку датчика положения ДПС-2.
Колонка штурвала устанавливается в балансировочное положение с помощью МЭТ-4У. Механизм МЭТ-4У управляется нажимными переключателями, расположенными на штурвалах. Угол поворота ДПС-2 пропорционален отклонению колонки штурвала от балансировочного положения.
Отклонение появляется при ручном пилотировании самолета. Следовательно, ДПС-2 вырабатывает сигнал переменного тока, пропорциональный произведению сигнала отклонения колонки штурвала от балансировочного положения на сигнал балансировочного положения.
Сигнал с выхода ДПС-2 поступает на вычислитель продольной управляемости БШУ-4. Вычислитель продольной управляемости представляет собой три независимых параллельно и одновременно работающих подканала, состоящих из фазочувствительных выпрямителей ПФ и УПТ-9. Выходные сигналы УПТ-9 поступают на КЭ, где вырабатывается осредненный достоверный сигнал. Этот сигнал поступает на усилитель сервопривода и далее на РА-56В1, который перемещает руль высоты.
Канал тангажа в этом режиме работает следующим образом: в зависимости от режима полета руль высоты находится в соответствующем балансировочном положении, обеспечивающем сохранение данного режима. При этом строенный ДПС-4 вырабатывает сигнал, пропорциональный этому положению. Этот сигнал поступает на ДПС-2 для запитки его статорных обмоток.
При ручном пилотировании, когда летчик перемещает колонку штурвала, с роторной обмотки ДПС-2 снимается сигнал. Этот сигнал пропорционален произведению двух перемещений: изменению балансировочного положения колонки и перемещению колонки от балансировочного положения. С ДПС-2 сигнал поступает на вычислитель продольной управляемости и далее на усилитель сервопривода. Усилитель сервопривода вырабатывает управляющий сигнал на РА-56В1, который перемещает руль высоты. В зависимости от режима полета, а значит и от балансировочного положения, перемещение руля высоты от РА-56В1 складывается или вычитается с перемещением руля высоты от проводки управления самолета. Таким образом, коэффициент передачи от колонки штурвала к рулю высоты изменяется в соответствии с балансировочным положением руля высоты, а значит и режимом полета. Этим обеспечивается постоянство характеристик управляемости самолета на разных режимах полета. Когда АБСУ-154-2 работает в режимах "Заход на посадку", "Уход на второй круг", "Стабилизация высоты", "Скорости и числа М", на усилитель сервопривода поступает сигнал  . При этом обеспечивается дополнительное демпфирование колебаний самолета по тангажу.
. При этом обеспечивается дополнительное демпфирование колебаний самолета по тангажу.
Рассмотрим работу канала тангажа в режиме "Штурвальное управление" по принципиальным электрическим схемам.
АБСУ в канале тангажа в режиме штурвального управления обеспечивает демпфирование колебаний самолета относительно поперечной оси  и улучшает характеристики продольной управляемости самолета. Канал тангажа АБСУ состоит из демпфера тангажа и вычислителя продольной управляемости.
и улучшает характеристики продольной управляемости самолета. Канал тангажа АБСУ состоит из демпфера тангажа и вычислителя продольной управляемости.
В демпфер тангажа входит блок демпфирующих гироскопов БДГ тангажа и сервопривод СП1-Г руля высоты. В вычислитель продольной управляемости входят: датчик ДПС-4 балансировочного положения руля высоты, кинематически связанный с перемещением механизма МЭТ-4У; датчик ДПС-2, кинематически связанный с перемещением колонки штурвала; собственно вычислитель продольной управляемости, расположенный в блоке БШУ.
Сервопривод состоит из блока демодуляции и усиления (усилитель привода) БДУ, расположенного в блоке БАП, и гидравлического рулевого агрегата РА-56В1, установленного в проводке управления рулем высоты.
Сигнал, пропорциональный угловой скорости , снимаемый со щетки потенциометра датчика угловой скорости ДУС, расположенного в блоке БДГ-26 (тангажа), относительно средней точки, через клемму "6" ("16", "26") поступает на клемму "6" ("16", "26") разъема Ш2 платформы ПКА-31. Питание ±12,5 В на потенциометр "ДУС" поступает в блоки питания БПН УЗ (У7, У10), расположенного в блоке БУ-65, через клеммы "9", "10" ("19", "20"; "29", "30") верхнего разъема блока, клеммы "1", "2" ("11", "12"; "21", "22") разъема Ш2 платформы ПКА-31 и клеммы "1", "2" ("11", "12"; "21", "22") разъема блока БДГ. Блоки питания через клеммы "1", "3" запитаны переменным напряжением 36 В 400 Гц.
Дата публикования: 2015-11-01; Прочитано: 1493 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
