 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Принцип действия 6 страница
|
|
Если канал вычислителя автоматического триммирования исправен, то на клемму "21" ("23") нижнего разъема блока поступает сигнал исправности этого канала. В случае отказа канала вычислителя на клемму "22" ("24) нижнего разъема блока поступает отказ канала.
Контроль режима стабилизации тангажа осуществляется системой встроенного контроля, которая контролирует гировертикали по тангажу, вычислители автопилота канала тангажа и вычислитель автоматического триммирования. В случаях, когда срабатывают два из трех сигнализаторов напряжения в блоке КГ-7 (У13, У14, У15) или в блоке БВК (У40, У41, У42), или когда отказывают оба канала вычислителя автоматического триммирования, тогда режим стабилизации в канале тангажа отключается.
При снятии двух из трех сигналов исправности на клемме "8" сигнализаторов напряжения У13, У14, У15 с клеммы "6" узла логики У16 поступает сигнал "2 отказа МГВ  " на клемму "2" разъема Ш8 блока КГ-7. Этот сигнал через клемму "2" разъема Ш1 платформы и клемму "6" первого нижнего разъема БВК поступает на клемму "4" релейных усилителей У22 и У23, которые запитаны через клеммы "1", "6" первым отказом МГВ. Усилители срабатывают, и с клеммы "13" посылают импульс отключения автоматики на реле продольного канала в блоке управления. Этот сигнал поступает через клемму "4" первого верхнего разъема БВК и клемму "38" верхнего разъема БУ-65 на сбросовые обмотки реле Р34 и Р35. Реле срабатывают, и отключается режим стабилизации в продольном канале.
" на клемму "2" разъема Ш8 блока КГ-7. Этот сигнал через клемму "2" разъема Ш1 платформы и клемму "6" первого нижнего разъема БВК поступает на клемму "4" релейных усилителей У22 и У23, которые запитаны через клеммы "1", "6" первым отказом МГВ. Усилители срабатывают, и с клеммы "13" посылают импульс отключения автоматики на реле продольного канала в блоке управления. Этот сигнал поступает через клемму "4" первого верхнего разъема БВК и клемму "38" верхнего разъема БУ-65 на сбросовые обмотки реле Р34 и Р35. Реле срабатывают, и отключается режим стабилизации в продольном канале.
Одновременно импульс поступает на реле Р22 в блоке БВК, через контакты "8", "9" которого и клемму "7" первого верхнего разъема БВК выдается сигнал на включение звуковой и световой сигнализации.
Аналогично релейные усилители У22 и У23 срабатывают при поступлении отказа с узлов логики У8 и У9 при снятии двух из трех исправностей сигнализаторов напряжения У40, У41, У42, контролирующих вычислитель автопилота. Релейные усилители У22 и У23 срабатывают и при поступлении отказа с узлов логики У7 при снятии двух исправностей вычислителя автоматического триммирования. При отказах штурвального режима эти усилители также срабатывают.
Включение режима стабилизации производится с пульта управления ПУ-46. Для подготовки включения тумблер "ТАНГ." устанавливается в положение "ВКЛ.", при этом через клеммы "12" и "14" разъема Ш1 блока и разъема Ш17 платформы команда "+27 В" поступает на клеммы "49" и "50" верхнего разъема блока БУ-65 и далее на контакты "3" реле Р34 и Р35, и одновременно на обмотки реле Р30 и Р31. Реле Р30 и Р31 срабатывают и подготавливают своими контактами цепи обмотки реле Р34 и Р35 к включению. Для включения стабилизации необходимо, чтобы сигнал исправности режима с релейного усилителя У23 блока БВК поступал через клемму "5" первого верхнего разъема блока и клемму "43" верхнего разъема блока БУ-65 на обмотки реле Р25 и Р26. Реле срабатывают и своими контактами подготавливают цепи обмоток реле Р34 и.Р35 к включению. При нажатии кнопки "СТАБ." на пульте управления ПУ-46 команда "+27 В" поступает на блок управления клемм "59" и "60" верхнего разъема. В блоке БУ-45 эта команда по двум цепям через контакты реле Р25 и Р26, контакты реле Р30 и Р31 поступает на обмотки реле Р34 и Р35. Реле Р34 и Р35 представляют собой дистанционные переключатели, которые при поступлении команды "+27 В" срабатывают и замыкают свои контакты "2" и "3" и оставляют их в замкнутом состоянии после снятия команды "+27 В".
Команда "+27 В" от тумблера "ТАНГ." при срабатывании реле Р34 и Р35 поступает на клеммы "51", "53", "54", "56", "57" верхнего блока БУ-65 и далее через клемму "27" блоков БАП-6 на обмотку реле Р6. А через клеммы "5" и "6" нижнего разъема блока БУТ-9 (с клемм "56" и "57") на реле, подключающие вход вычислителя автоматического триммирования. Реле Р6 в блоке БАП срабатывают и подключают сигнал с вычислителя автопилота продольного канала к приводу. Отключение режима производится вручную от кнопок КБО либо от тумблера "ТАНГ." или при управлении колонкой штурвала, либо автоматически при отказе системой встроенного контроля.
Сигнал от кнопок КБО левого и правого летчиков поступает на блок управления (клеммы "42" и "61") верхнего разъема и далее на обмотки реле Р21, Р24, Р42, Р43. Реле срабатывают и через контакты "2" и "3" реле Р24 и Р42 команда "+27 В" поступает на сбросовые обмотки реле Р34 и Р35, которые срабатывают и разрывают контакты "2" и "З", при этом команда включения стабилизации снимается с клемм "51", "53", "54", "56", "57" блока управления.
Сигнал от тумблера "ТАНГ." пульта ПУ-46 при отключении поступает по двум цепям на клеммы "13" и "15" разъема Ш1 через контакты реле Р3 и Р4, которые кратковременно срабатывают при отключении тумблера "ТАНГ."
Далее сигнал через клеммы "13" и "15" разъема Ш17 платформы поступает через клеммы "40" и "41" верхнего разъемов блока БУ-65 на сбросовые обмотки реле Р34 и Р35. Реле срабатывают и размыкают цепи контактов "2" и "3".
При поступлении сигналов отказа режима стабилизации релейные усилители У22 и У23 срабатывают и выдают команду "+27 В" через клемму "4" первого верхнего разъема и клемму "38" верхнего разъема блока БУ-65 на сбросовые обмотки реле Р34 и Р35. Реле срабатывает и размыкают цепи контактов "2" и "З".
Одновременно срабатывает реле Р22 в блоке БВК и через контакты "8" и "9" и клемму "7" первого верхнего разъема блока выдается сигнал на включение световой и звуковой сигнализации. Режим управления от рукоятки "СПУСК-ПОДЬИГ осуществляется следующим образом.
При отклонения рукоятки "СПУСК-ПОДЬЕМ" сигнал с потенциометров через клеммы "9", "10", "11" разъема Ш2 пульта ПУ-46, клеммы "9". "10", "11" разъема Ш18 платформы, клеммы "11" верхнего разъема блоков БАП, регулировочное сопротивление R4 и постоянный резистор R5 поступает на вычислитель автопилота.
Потенциометр рукоятки "СПУСК-ПОДЪЕМ" запитывается от блока питания У3 (У7, У10), расположенного в блоке БУ-65, через клеммы "9" и "10" ("19" и "20"; "29" и "30") верхнего разъема блока БУ-65, клеммы "5" и "6" ("2" и "7", "3" и "8) разъема Ш18 платформы и клеммы "5" и "6" ("2" и "7", "3" и "8") разъема Ш2 пульта управления ПУ-46. С выхода вычислителя сигнал поступает на усилитель привода и штока рулевой машинки, отклоняет руль высоты в сторону, необходимую для совершения требуемого маневре в вертикальной плоскости. Самолет изменяет тангаж, появляется сигнал отклонения от тангажа, который поступает с гировертикали на вычислитель автопилота и компенсирует сигнал с рукоятки "СПУСК-ПОДЪЕМ". Руль высоты возвращается в нулевое положение, и самолет совершает маневр с заданным углом тангажа.
Когда рукоятка "СПУСК-ПОДЪЕМ" устанавливается в нулевое положение, руль высоты отклоняется в противоположном направлении и самолет начинает возвращаться к горизонтальному полету, прекращая выполнение маневра в вертикальной плоскости.
В продольном канале для возможности стабилизации любого угла тангажа (в пределах работы автопилота) установлено устройство согласования, которое формирует сигнал опорного тангажа до момента включения режима стабилизации.
Устройство согласования состоит из магнитного усилителя УМ1 (УМ2, УМ3) и исполнительного механизма У2 (У6, У9), расположенных в блоке БУ-65, и работает следующим образом.
Сигнал с выхода суммирующего усилителя через клемму "47" верхнего разъема БАП, клемму "7" ("17", "27") верхнего разъема-БУ-65, резистор R4 (R11, R18) поступает на вход магнитного усилителя УМ1 (УМ2, УМ3). С выхода магнитного усилителя устройства согласования сигнал поступает на обмотку управления двигателя исполнительного механизма У2 (У6, У9). В режиме штурвального управления обмотка реле Р36 (Р38, Р39) обесточена, контакты "1", "2" замкнуты и при этом средняя точка обмотки управления двигателя запитывается фазой А ~ 36 В 400 Гц. Двигатель начинает вращаться и через редуктор перемещает щетку по потенциометру устройства согласования. Потенциометр устройства согласования через клеммы "10", "14" и "16", "8" У2 (У6, У9) запитывается напряжением +12,6 В с блока питания У3 (У7, У10).
Сигнал со щетки через клемму "8" ("18", "28") верхнего разъема блоха БУ-65, клемму "12" верхнего разъема блока БАП, регулировочное сопротивление R14 и постоянный резистор R15 поступает на вход суммирующего усилителя.
Полярность этого сигнала подобрана таким образом, что этот сигнал стремится скомпенсировать все сигналы, присутствующие на входе суммирующего усилителя и сделать выход с суммирующего усилителя равным нуле. Только при этом условии вращение двигателя остановится и движение щетки прекратится.
Таким образом, в штурвальном режиме устройство согласования позволяет вычислителю автопилота подслеживание за изменением текущего тангажа самолета и делает выход с него равным нулю.
В момент включения режима стабилизации на обмотки реле Р36 (Р38, Р39) подается команда "+27 В", реле срабатывают и разрывают запитку средней точки обмотки управления двигателя, двигатель останавливается. Для исключения самохода через контакты "5", "6" реле Р36 (Р38, Р39) на муфту редуктора подается команда "+27 В" и редуктор стопорится.
Изменение угла тангажа, который был на момент включения режима стабилизации, поступает на вход усилителя привода и вызывает отклонение руля высоты.
В. Режим "Стабилизация высоты"
Структурная схема канала тангажа в режиме "Стабилизация высоты" показана на рис. 20.
Стабилизация самолета по высоте производится на основе сигнала отклонения его от заданной высоты полета  , формирующегося в корректоре-задатчике высоты КЗВ. Этот сигнал усиливается коэффициентом
, формирующегося в корректоре-задатчике высоты КЗВ. Этот сигнал усиливается коэффициентом  , имеющим разные значения на маршруте и посадке. Передаточный коэффициент переключается по сигналу "Выпуск шасси" или при включении радиовысотомера. Для улучшения динамики полета в схему вводится демпфирующий сигнал
, имеющим разные значения на маршруте и посадке. Передаточный коэффициент переключается по сигналу "Выпуск шасси" или при включении радиовысотомера. Для улучшения динамики полета в схему вводится демпфирующий сигнал  , получающийся в результате дифференцирования позиционного сигнала с одновременным пропусканием его через фильтр
, получающийся в результате дифференцирования позиционного сигнала с одновременным пропусканием его через фильтр  и усилением коэффициентом передачи
и усилением коэффициентом передачи  . Сигнал
. Сигнал  отключается в полете в "болтанку".
отключается в полете в "болтанку".
Для устранения статической ошибки по высоте вводится сигнал, пропорциональный интегралу высоты, полученный интегрированием позиционного сигнала, усиленный коэффициентом  и ограниченный ограничителем
и ограниченный ограничителем  .
.
Все три сигнала суммируются и после ограничения ( ) поступают в предусилитель. Суммарный сигнал стабилизации высоты отключается в режиме управления тангажом.
) поступают в предусилитель. Суммарный сигнал стабилизации высоты отключается в режиме управления тангажом.
Для устранения просадки по высоте при развороте в боковой плоскости в схеме предусмотрен сигнал, пропорциональный модулю крена, поступающий из МГВ. Коэффициент пропорциональности этого сигнала  .
.
Для устранения "вспухания" самолета при выпуске механизации вводится программный сигнал  , который включается через 4 с после начала выпуска закрылков, а через 20 с плавно уменьшается. Сигнал
, который включается через 4 с после начала выпуска закрылков, а через 20 с плавно уменьшается. Сигнал  подается только при выпущенных шасси.
подается только при выпущенных шасси.
Дальнейшее формирование сигнала  аналогично режиму "Стабилизация тангажа" с той лишь особенностью, что имеется дополнительное демпфирование (передаточный коэффициент
аналогично режиму "Стабилизация тангажа" с той лишь особенностью, что имеется дополнительное демпфирование (передаточный коэффициент  ), которое отключается через 4 с после начала выпуска захрипев (на 16 с). Формирование управляющего сигнала в режиме "Стабилизация высоты" (см. рис. 18) осуществляет вычислитель корректора высоты ВКВ-2. Вычислитель корректора высоты состоит из УПТ-9, блока интеграла (БИ) и суммирующего УПТ.
), которое отключается через 4 с после начала выпуска захрипев (на 16 с). Формирование управляющего сигнала в режиме "Стабилизация высоты" (см. рис. 18) осуществляет вычислитель корректора высоты ВКВ-2. Вычислитель корректора высоты состоит из УПТ-9, блока интеграла (БИ) и суммирующего УПТ.
Работа канала тангажа в этом режиме происходит следующим образом.
При включении режима срабатывает реле Р2, подключающее выход ВКВ-2 к входу вычислителя САУ-154-2 и отключающее тест обратной связи, охватывающей УПТ-9 и БИ. Корректор высоты КЗВ вырабатывает сигнал отклонения самолета от заданной высоты. Этот сигнал в виде напряжения постоянного тока подключается к входу УПТ, где усиливается по величине и мощности. С выхода усилителя мощности сигнал поступает на вход блока интеграла и одновременно на вход суммирующего усилителя, на другой вход которого поступает выходной сигнал блока интеграла.
На этом же усилителе формируется сигнал, пропорциональный скорости изменения отклонения от заданной высоты. Алгебраическая сумма этих трех сигналов усиливается суммирующим усилителем, а его выходной сигнал в виде управляющего сигнала поступает на вход трех вычислителей САУ-154-2. С выхода вычислителя САУ-54-2 управляющий сигнал поступает на усилитель сервопривода. Одновременно с включением режима на вход сервопривода начинает поступать сигнал  , который обеспечивает дополнительное демпфирование колебаний самолета вокруг поперечной оси в режиме "Стабилизация высоты". В момент выпуска закрылков вследствие увеличения подъемной силы самолет начинает набирать высоту - "вспухает". Для устранения этого нежелательного явления в вычислитель продольного канала САУ-154-2 подается дополнительный сигнал, который заставляет руль высоты отклоняться вниз, препятствуя "вспуханию". Подъемная сила самолета при выпуске закрылков меняется по сложному закону, поэтому подключение и переключение сигнала, устраняющего "вспухание", производится с помощью реле времени. Одновременно с подачей дополнительного сигнала тангажа уценивается коэффициент при
, который обеспечивает дополнительное демпфирование колебаний самолета вокруг поперечной оси в режиме "Стабилизация высоты". В момент выпуска закрылков вследствие увеличения подъемной силы самолет начинает набирать высоту - "вспухает". Для устранения этого нежелательного явления в вычислитель продольного канала САУ-154-2 подается дополнительный сигнал, который заставляет руль высоты отклоняться вниз, препятствуя "вспуханию". Подъемная сила самолета при выпуске закрылков меняется по сложному закону, поэтому подключение и переключение сигнала, устраняющего "вспухание", производится с помощью реле времени. Одновременно с подачей дополнительного сигнала тангажа уценивается коэффициент при  .
.
Усилитель сервопривода формирует управляющий сигнал на РА-56В1, который перемещает руль высоты в сторону, необходимую для возвращения самолета на заданную высоту.
Рассмотрим работу канала тангажа в режиме "Стабилизация высоты" по принципиальным электрическим схемам.
АБСУ в канале тангажа в режиме стабилизации высоты полета обеспечивает демпфирование колебаний самолета относительно оси z, стабилизирует текущую высоту полета, а также обеспечивает компенсацию "вспухания" самолета при выпуске закрылков на предпосадочном маневре.
Канал тангажа АБСУ в режиме стабилизации высоты полета автоматически устанавливает руль высоты в балансировочное положение.
Режим стабилизации высоты обеспечивается вычислителем автопилота и вычислителем режимов стабилизации высоты, числа М и приборной скорости.
Отработка руля высоты в балансировочное положение обеспечивается так же, как в режиме стабилизации вычислителем автоматического триммирования с помощью исполнительного механизма МЭТ-4У.
Демпфирование колебаний самолета осуществляется демпфером тангажа, работа которого рассматривалась в режиме штурвального управления. Однако в режиме стабилизации высот» требуется увеличенное демпфирование самолета. Это дополнительное демпфирование осуществляется следующим образом.
На усилитель привода через контакты реле Р30, регулировочное сопротивление R82 и постоянный резистор R83 подается дополнительный сигнал, пропорциональный угловой скорости . При этом руль высоты отклоняется на больший угол, осуществляя увеличенное демпфирование колебаний самолета. Команда "+27 В" на обмотку реле Р30 поступает при включении режимов стабилизации высоты, числа М или скорости полета. Реле срабатывает, замыкает контакты "2" и "3" и обеспечивает прохождение дополнительного сигнала на усилитель привода.
Стабилизация самолета по высоте осуществляется автопилотом автоматически при включении режима по сигналу отклонения от высоты с корректоров КЗВ-0-15.
При отклонении самолета от текущей высоты, на которой был включен режим, сигнал, пропорциональный отклонению от высоты, снимается с корректора высоты №1 по постоянному току относительно средней точки. Через клемму "6" разъема Ш11 платформы сигнал поступает на клемму "50" разъема ВКВ и далее на регулировочное сопротивление R5. Сигнал с корректора высоты №2 через клемму "9" разъема Ш11 поступает на клемму "53" разъема ВКВ и далее на регулировочное сопротивление R7.
В блоке ВКВ сигнал со щетки регулировочного сопротивления R5 поступает на клемму "7" разъема ВКВ, а через контакты реле Р7 и постоянный резистор R2 на вход усилителя У1.
Усилитель через клеммы "2" в "5" запитан постоянным напряжением ±25 В от блока питания У7. Для компенсации ненулевых сигналов на вход усилителя У1 через резистор R11 подается напряжение центровки с регулировочного сопротивления R12. Сопротивление R12 запитывается постоянным напряжением от блока питания У5. Для стабильности сигнала центровки это напряжение стабилизируется стабилитронами Д33 и Д34.
С выхода усилителя УЗ (клемма "4") сигнал поступает через резистор R13 на вход блока интеграла У4, через контакт реле Р24, фильтр С2 и R22 на вход выходного усилителя У6 и через контакты реле Р8 и резистор R14 поступает также на вход выходного усилителя. С выхода блока интеграла (клемма "10") сигнал через резистор R17 поступает на вход выходного усилителя У6. Таким образом, на входе усилителя У6 присутствуют три сигнала: первый сигнал, поступающей через фильтр С2 и R22, пропорционален производной отклонения от высоты; второй сигнал, поступающий через резистор R14, пропорционален отклонению от высоты; третий сигнал, поступавший через резистор R17 пропорционален интегралу отклонения от высоты.
Потенциометр блока интеграла запитан от блока питания У5 постоянным напряжением. Двигатель блока интеграла через редуктор перемещает щетку блока интеграла до тех пор, пока на входе блока интеграла (клемма "2") присутствует входной сигнал.
Для компенсации ненулевых сигналов на вход усилителя У6 через резистор R18 подается напряжение центровки со щетки регулировочного сопротивления R19. Сопротивление R19 запитано постоянным напряжением блока питания У5, которое стабилизируется стабилитронами Д33 и Д34.
Усилитель У6 через клеммы "2" и "5" запитан постоянным напряжением ±25 В от блока питания У7. Блок питания У7 через клеммы "1" и "3" запитан переменным напряжением 36 В 400 Гц.
С выхода усилителя У6 через клемму "12" разъема ВКВ, платформу, клемму "8" верхнего разъема блоков БАП, контакт реле Р8, постоянный резистор R9 поступает на вход суммирующего усилителя автопилота. С выхода суммирующего усилителя сигнал поступает на усилитель привода, и шток рулевой машинки отклоняет руль высоты в сторону, необходимую для устранения отклонения от стабилизируемой высоты. Самолет изменяет тангаж, появляющийся сигнал отклонения от тангажа с гировертикали поступает на вход суммирующего усилителя автопилота и компенсирует сигнал с вычислителя стабилизации высоты. Сигнал на выходе суммирующего усилителя становится нулевым, руль высоты устанавливается в нуль и самолет с определенным углом тангажа возвращается к прежней высоте. По мере приближения к высоте сигнал с выхода вычислителя стабилизации высоты уменьшается, руль высоты отклоняется в другую сторону, и самолет изменяет тангаж и возвращается к прежней высоте. Когда он вернется на эту высоту, тангаж самолета будет прежним.
Сигнал с выхода вычислителя стабилизации высоты ограничен по величине микросхемами У8 и У9. Эта величина определяет максимальное изменение угла тангажа в переходном режиме стабилизации высоты.
Контроль режима стабилизации высоты осуществляется системой встроенного контроля, которая контролирует, как было описано ранее, режим стабилизации, а также дополнительно осуществляет контроль корректоров высоты и выходного сигнала вычислителя стабилизации высоты.
Для контроля корректоров высоты сигнал со щеток регулировочных сопротивлений R5 и R7 через клеммы "7" и "52" разъема ВКВ, клеммы "38" и "39" второго верхнего разъема БВК поступает на сигнализатор напряжения У43. Если сигналы корректоров одинаковы, то с клеммы "8" этот сигнал поступает на обмотку реле Р92.
Вычислитель стабилизации высоты контролируется устройством контроля У2, на которое подается входной сигнал (на клемму П3/7). Сигнал блока интеграла поступает на клеммы П3/13 и П3/В, а выходной сигнал выходного усилителя - на клемму П1/1. Устройство контроля проводит контроль этих сигналов и в случае их исправности выдает сигнал исправности на клемму П3/10. Этот сигнал через клемму "19", разъем ВКВ, клемму "40" второго верхнего разъема блока ВКВ поступает на стабилитрон Д27, резистор R1 и далее на устройство запрета У66. При этом устройство запрета с клеммы "2" выдает сигнал "-27 В" на второй конец обмотки реле Р92. Реле срабатывает и через клемму "11" первого верхнего разъема выдает сигнал исправности режима стабилизации высоты, а также снимает сигнал с обмотки реле Р94.
В случае отказа режима стабилизации его отключение происходит так, как было описано выше. Одновременно сигнал отключения стабилизации через клемму "35" разъема ВКВ поступает не реле Р27, которое срабатывает, своими контактами замыкает цепи реле Р1, которое в свою очередь разрывает цепи реле Р7, Р8 и отключает режим стабилизации высоты.
В случае срабатывания устройства контроля У2 в блоке ВКВ либо сигнализатора напряжения У43 реле Р92 в блоке БВК обесточивается. Через контакты реле Р92 (либо с клеммы "6" цепи задержки У92).на обмотку реле Р94 поступает сигнал "+27 В". На второй конец обмотки с клеммы "2" устройства запрета У66 поступает команда "-27 В", но при условии, что на клемму "5" У66 также с цепи задержки У92 поступает сигнал "+27 В". Этот сигнал с цепи задержки поступает при условии, что включен режим стабилизации высоты и на клемму "8" блока диодов У36 поступает команда "+27 В" этого режима. С блока диодов эта команда поступает на клемму "1" цепи задержки У92 и далее на клеммы "2" и "6" этого устройства. Цепь задержки при отключении сигнала с клеммы "1" (в течение времени задержки) продолжает выдавать команду "+27 В" на клеммы "2" и "6". Это необходимо для более уверенного автоматического отключения режима стабилизации высоты при отказе. При поступлении команды "+27 В" на обмотку реле Р94 оно срабатывает, замыкает свои контакты "2" и "3'' и через клемму "4" первого верхнего разъема БВК, клемму "35" разъема ВКВ на обмотку реле Р27 поступает команда "+27 В". Реле срабатывает и отключает режим стабилизации высоты.
Одновременно в блоке БВК команда с контакта реле Р94 поступает на обмотку реле Р22, которое срабатывает и через свои контакты "8" и "9" подает сигнал на включение световой и звуковой сигнализации об отказе режима. Включение режима производится с пульта управления ПУ-46. Предварительно включается режим стабилизации, как было описано ранее. На кнопку Кн4 (Н) через клемму "25" разъема В1 поступает из БВК сигнал исправности режима стабилизации высоты с клеммы "11" первого верхнего разъема. Сигнал исправности вычислителя стабилизации высоты с клеммы "19" разъема ВКВ поступает в блоки БАП через клемму "29" верхнего разъема на реле Р8, которое срабатывает и своими контактами подключает выход вычислителя стабилизации высоты к входу вычислителя автопилота. При нажатии кнопки Кн4 команда "+27 В" через клемму "22" разъема Ш1 пульта, клемму "22" разъема Ш17 платформы и клемму "15" разъема ВКВ поступает на обмотку реле Р16 и одновременно на сбросовые обмотки реле Р17 и Р18. Реле Р16 срабатывает и замыкает контакты "3", "2" в цепи обмоток реле Р7, Р8, Р28. При включении режима стабилизации команда "+27 В" поступает через клемму "22" на реле Р21, которое срабатывает и обесточивает обмотки реле Р1, Р2, Р3. Реле Р1 замыкает контакты "1", "2" в цепи обмоток реле Р7, Р8, Р28, которые срабатывают и подключают сигналы к входу усилителей У1 и У6.
Отключение режима стабилизации высоты производится вручную от кнопок КБО левого и правого летчиков, от тумблера "ТАНГ." на пульте ПУ-46, от рукоятки "СПУСК-ПОДЪЕМ", при включении режимов "Глиссада" или "Уход", при управлении колонкой штурвала.
Автоматически режим отключается при его отказе системой встроенного контроля.
При нажатии кнопок КБО команда через клеимы "13", "14" разъема ВКВ поступает на обмотки реле Р14, Р15, которые срабатывают. При этом срабатывает реле Р27 и отключается режим стабилизации высоты. При отключении тумблера "ТАНГ." на пульте управления команда поступает через клеммы "41" и "42" на реле Р27, которое отключает режим стабилизации высоты. При управлении рукояткой "СПУСК-ПОДЪЕМ", при включении режимов "Глиссада" или "Уход" либо при управлении колонкой штурвала команда поступает на реле Р27 через клеммы "37", "33", "63", "36" соответственно.
При отказе режима, как описывалось ранее, команда отключения режима поступает на клемму "4" первого верхнего разъема БВК и далее через клемму "35" разъема ВКВ на реле Р27, которое отключает режим стабилизации высоты. Компенсация "вспухания" самолета при выпуске закрылков производится на предпосадочном маневре. Сигнал на вычислитель автопилота поступает с блока питания УЗ (У7, У10) блока БУ-65 через клемму "10" ("20", "30") верхнего разъема блоха, через клемму "33" верхнего разъема блока БАП, контакт реле Р24, регулировочное сопротивление R23, постоянные резисторы R52, R79, R80. Реле Р24 срабатывает при выпуске закрылков, когда на клемму "34" верхнего разъема БАП поступает команда "+27 В" с реле времени в блоке БСН-7, но через контакты реле Р32.
Реле Р32 срабатывает на предпосадочном маневре, при выпуске шасси, когда на клемму "42" верхнего разъема поступает команда "+27 В".
Г. Режим "Стабилизация приборной скорости"
В режиме "Стабилизация приборной скорости" стабилизируется приборная скорость самолета отклонением руля высоты.
Структурная схема канала тангажа в этом режиме показана на рис.22.
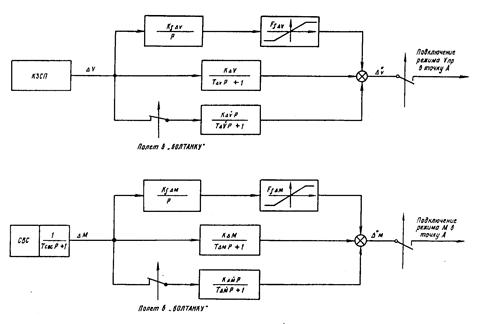
Рис.22. Структурная схема канала тангажа в режимах «Стабилизация скорости и числа М»
В качестве датчика рассогласования  используется корректор приборной скорости КЗСП.
используется корректор приборной скорости КЗСП.
Дата публикования: 2015-11-01; Прочитано: 575 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
