 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Cвязь между потенциальной энергией и силой
|
|
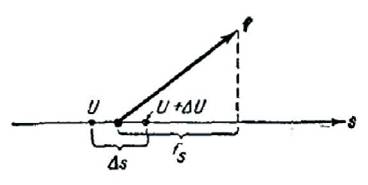 Каждой точке потенциального поля соответствует одной стороны, некоторое значение вектора силы f, действующей на тело, с другой стороны, некоторое значение потенциальной энергии тела U. Следовательно, между силой и потенциальной энергией должна существовать определенная связь. Для установления этой связи вычислим элементарную работу, ΔAсовершаемую силами поля при малом перемещении тела Δs, происходящем вдоль произвольно выбранного направления в пространстве, которое мы обозначим буквой s.
Каждой точке потенциального поля соответствует одной стороны, некоторое значение вектора силы f, действующей на тело, с другой стороны, некоторое значение потенциальной энергии тела U. Следовательно, между силой и потенциальной энергией должна существовать определенная связь. Для установления этой связи вычислим элементарную работу, ΔAсовершаемую силами поля при малом перемещении тела Δs, происходящем вдоль произвольно выбранного направления в пространстве, которое мы обозначим буквой s.
Эта работа равна:
 , где
, где  — проекция силы
— проекция силы  на направление
на направление  .
.
Поскольку в данном случае работа совершается за счет запаса потенциальной энергии, она равна убыли потенциальной энергии —  на отрезке
на отрезке  оси :
оси : 
Тогда  , откуда
, откуда 
Это выражение даст среднее значение  на отрезке . Чтобы получить значение в данной точке, нужно произвести предельный переход:
на отрезке . Чтобы получить значение в данной точке, нужно произвести предельный переход:
Поскольку  может изменяться не только при перемещении вдоль оси , но также и при перемещениях вдоль других направлений, предел в формуле представляет собой, так называемую частную производную от по :
может изменяться не только при перемещении вдоль оси , но также и при перемещениях вдоль других направлений, предел в формуле представляет собой, так называемую частную производную от по :  .
.
Соотношение справедливо для любого направления в пространстве, в частности, и для направления декартовых координатных осей x, y, z:

 Формулы определяют проекции вектора силы на координатные оси. Если известны эти проекции, оказывается определенным и сам вектор силы:
Формулы определяют проекции вектора силы на координатные оси. Если известны эти проекции, оказывается определенным и сам вектор силы:
В математике вектор  , где a — скалярная функция x, y, z, называется градиентом этого скаляра и обозначается символом
, где a — скалярная функция x, y, z, называется градиентом этого скаляра и обозначается символом  Следовательно, сила равна градиенту потенциальной энергии, взятому с обратным знаком
Следовательно, сила равна градиенту потенциальной энергии, взятому с обратным знаком 
Условия равновесия механических систем.
В замкнутой системе полная энергия остается постоянной, поэтому кинетическая энергия может возрастать только за счет уменьшения потенциальной энергии. Если система находится в таком состоянии, что скорости всех тел равны нулю, а потенциальная энергия имеет минимальное значение, то без воздействия извне тела системы не могут прийти в движение, т. е- система будет находиться в равновесии.
Таким образом, для замкнутой системы равновесной может быть только такая конфигурация тел, которая соответствует минимуму потенциальной энергии системы.
Рассмотрим случай, когда взаимное расположение тел системы может быть определено с помощью только одной величины, например координаты х. В качестве примера можно привести систему Земля — шарик, скользящий без трения по укреплённой неподвижно изогнутой проволоке. Другим примером может служить прикрепленный к концу пружины шарик, скользящий по горизонтальной направляющей.
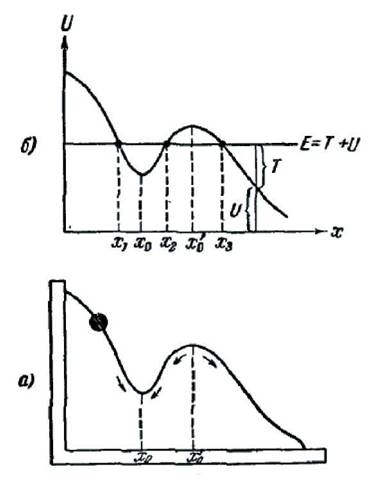
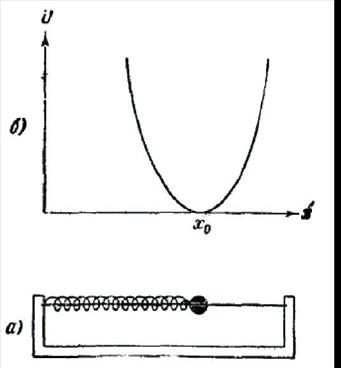
Минимумам U соответствуют значения x равные x0 - длина недеформированной пружины
Условие минимума U имеет вид 
Условие равнозначно тому, что  (когда U является функцией только одной переменной x,
(когда U является функцией только одной переменной x,  ).
).
Таким образом, конфигурация системы, соответствующая минимуму потенциальной энергии, обладает тем свойством, что силы, действующие на тела системы, равны нулю. Этот результат остается справедливым и в общем случае, когда U является функцией нескольких переменных.
В случае, изображенном на рис., условия выполняются также для x, равного  (т. е, для максимума U). Определяемое этим значением
(т. е, для максимума U). Определяемое этим значением  положение шарика также будет равновесным. Однако это равновесие в отличие от равновесия при x=x0 будет неустойчивым: достаточно слегка вывести шарик из этого положения, как возникает сила, которая будет удалять шарик от положения . Силы, возникающие при смещении шарика из положения устойчивого равновесия (для которого x=x0), направлены так, что стремятся вернуть шарик в положение равновесия.
положение шарика также будет равновесным. Однако это равновесие в отличие от равновесия при x=x0 будет неустойчивым: достаточно слегка вывести шарик из этого положения, как возникает сила, которая будет удалять шарик от положения . Силы, возникающие при смещении шарика из положения устойчивого равновесия (для которого x=x0), направлены так, что стремятся вернуть шарик в положение равновесия.
Зная вид функции, которой выражается потенциальная энергия системы, можно сделать ряд заключений о характере движения системы. Поясним это, воспользовавшись графиком, изображенным на рис. Если полная энергия системы имеет значение, соответствующее проведенной на графике горизонтальной черте, то система может совершать движение либо в пределах от x1 до x2 либо в пределах от x2 до бесконечности. В область x<x1 и x2<x<x3 система проникнуть не может, так как потенциальная энергия не может стать больше полной энергии (если бы это случилось, то кинетическая энергия стала бы отрицательной). Таким образом, область x2<x<x3 представляет собой потенциальный барьер, через который система не может проникнуть, имея данный запас полной энергии.
Рис. поясняет, как с помощью графика U определить кинетическую энергию, которой обладает система при данном значении х.
21. Неинерциальная система отсчета.
Дата публикования: 2015-11-01; Прочитано: 580 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
