 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Народного хозяйства и государственной службы 3 страница
|
|
Преобразуя последнюю формулу, будем иметь ДЛ1,,,. i = 77 ('«-'■)•
Эта формула позволяет определитьприращенне угловой скорости за время поворота коленчатого вала на угол Да.=а„-а,г
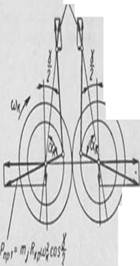
Пользуясь формулой и графиком касательных сил, можно построить график изменения угловых скоростей о\ (рис. 59), из которого видно, что угловая скорость для разных двигателей и режимов работы изменяется по-разному.
Для оиенки двигателя с точки зрения изменения угловой скорости коленчатого вала определяют степень неравномерности хода
" «>. с/.
Степень неравномерности хода зависит от частоты чередования вспышек, средней угловой скорости коленчатого вала, момента инерции маховика, ветчины приращений крутящего момента (который, в свою очередь, зависит от рабочего объема цилиндра и степени форсировкн двигателя).
Степень неравномерности хода можно определить также из выражения
где F, — наибольшая положительная площадь, ограниченная кривой касательных сил 7" и линией их среднего значения Тгр (рис. 59, е); тт и п\а —соответствующие масигтабы касательных сил и углов поворота коленчатого вала.
Пользуясь этой формулой, можно определить необходимый момент инерции маховика для получения заданной степени неравномерности хода.
Следует отметить, что степень неравномерности хода очень влияет на комфортабельность, а иногда и на устойчивость мотоцикла. Так как степень неравномерности хода зависит от величины изменения крутящего момента, она характеризует также величину изменения нагрузки на детали силовой передачи мотоцикла.
Чтобы улучшить равномерность движения мотоцикла, а также выровнять нагрузки на детали силовой предачн, можно ввести в нее специальный упругий гаситель, уменьшающий неравномерность крутящего момента.
Гаситель позволяет значительно уменьшить момент инерции маховика, а следовательно, его вес н размеры, поэтому установка гасителя весьма желательна.
Однако при значительном уменьшении момента инерции маховика (или маховиков) ухудшается способность мотоцикла трогаться с места. Рассмотрим процесс трогания мотоцикла с места.
После пуска двигателя шестерни коробки передач занимают нейтральное положение, водитель выключает сцепление и влючает первую передачу. Затем, постепенно отпуская сцепление, вращает рукоятку, которая управляет дроссельным золотником, увеличивая наполнение цилиндров горючей смесью.
Мотоцикл может начать двигаться, когда момент сцепления будет равен сумме моментов сопротивлений: трения в деталях силовой передачи и качению шин. Если трогание с места происходит на подъеме, то к сопротивлениям добавляется сопротивление подъема.
В начале разгона мотоцикл движется с пробуксовывающим сцеплением, причем угловая скорость ведомых дисков увеличивается, а коленчатого вала уменьшается. Дальнейший разгон начинается с момента окончания пробуксовки сцепления, когда мотоцикл движется под действием избыточного крутящего момента двигателя.
В начале разгона ннерцня маховика оказывает положительное влияние, а затем уменьшает ускорение мотоцикла. Для увеличения ускорения мотоцикла (приемистости), что особенно важно для гоночного мотоцикла, необходимо уменьшить момент инерции маховика.
При расчете маховика на троганне с места считают, что во время трогания крутящий момент двигателя от сил газов целиком идет на преодоление моментов сопротивления трения и качения, а инерция мотоцикла преодолевается только за счет потерн кинетической энергии вращающихся масс двигателя.
Исходя из этого определим кинетическую энергию, затрачиваемую на троганне мотоцикла с места и разгон его до скорости v, соответствующей минимальным устойчивым числам оборотов коленчатого вала двигателя:
. О t*
Моменты инерции колес не учитываются, так как они по сравнению с массой мотоцикла незначительны.
Кинетическая энергия маховика, потерянная при уменьшении числа оборотов коленчатого вала с /», до л, (я, — число оборотов, соответствующее началу трогания):
После преобразования
] S,______ w.
Минимальные устойчивые числа оборотов изменяются в значительных пределах и зависят от степени сжатия, мощности, числа иилнндров и т. д. Для одно- и двухцилиндровых двигателей дорожных мотоциклов минимальные устойчивые числа оборотов коленчатого вала находятся о пределах 1200—2000 в минуту, а для двигателей гоночных мотоциклов могут повышаться 'до 4000—5000 в минуту.
Скорость движения мотоцикла на первой передаче, соответствующая минимальным устойчивым числам оборотов двигателя,
"= W
Подставляя значение о в формулу, окончательно получим
| J |
Or'jt'
О
Обычно для дорожных мотоциклов величина отношения я'- находится в пределах 1,5—2.
Момент инерции маховика проще всего находить аналитически, как момент инерции диска
где т0 — масса диска; г„ — радиус диска. Преобразуй это выражение, получим
Ja = 10 "рДО кГ м сек»,
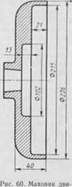
где d0 — диаметр диска в см: Ь0 — толщина диска в мм. р„ — плотность материала диска в г/см 3. На рис. 60 показан маховик двигателя К-750. Его момент инерции определяется как разность моментов инерции дисков диаметрами 226, 215, 102 «м.м: JM 10 • 7,8(22.6' • 40 - 21,5* • 21 — 10,2* — - 13) = 0,00045 кГ м сек*.
§ 55. УРАВНОВЕШИВАНИЕ ДВИГАТЕЛЯ
Во время работы двигатели на него действуют: вес G„, двигателя; реактивный момент, возникающий в результате сопротивления движению мотоцикла и трения в силовой передаче, силы трения между движущимися частями двигателя; центробежная сила Ре вращающихся частей; сила инерции возвратно-поступательно движущихся масс двигателя и давления Р, газов.
Некоторые из этих сил вызывают переменную по величине и направлению нагрузку на опоры двигателя, в результате чего возникает вибрации всего мотоцикла или отдельных его частей, например руля, подножек; иногда вибрация является причиной поломок рамы. Поэтому эти силы необходимо уравновесить.
|
Двигатель считается уравновешенным, если прн установившемся режиме работы на его опоры действуют постоянные по величине и направлению силы. Поэтому при исследовании уравновешенности двигателя рассматривают только переменные силы, так как постоянные силы (например, вес двигателя <3Лв) на уравновешенность двигателя не влияют.
Силы давлении газов в цилиндре и силы трения уравновешиваются внутри двигателя и на опоры не передаются.
Крутящий, а следовательно, и реактивный моменты двигателя, как было показано выше, непрерывно меняются.
Обратный крутящему моменту двигателя реактивный момент, если считать, что колеса мотоцикла вращаются равномерно, определяют по формуле
Мл = М((М +
где Мм — момент сопротивления;
гы — угловое ускорение коленчатого вала.
Второй член формулы, равный моменту касательных сил инерции всех вращающихся масс двигателя, непрерывно изменяясь, может вызвать вибрацию двигателя. Первый член также непостоянен. Сила инерции мотоцикла и колес препятствует возникновению угловых ускорений коленчатого вала, н поэтому момент сопротивления возрастает с увеличением касательной силы, и наоборот.
Уменьшить колебании величины М^ можно с помощью установки в силовую передачу упругого элемента (гасителя).
Однако главной причиной неуравновешенности являются силы инерции вращающихся и возвратно-поступательно движущихся частей. Эти силы пропорциональны квадрату числа оборотов и могут достигать значительной величины.
Сначала рассмотрим уравновешивание центробежных сил эксцентрично расположенных вращающихся масс кривошипов, т. е. масс, центр тяжести которых не находится на оси вращения. Уравновешенность вращающихся масс может быть статической и динамической. Статически уравновешенной называется такая система, центр тяжести которой лежит на оси вращения. Однако уравновешенная таким образом система не исключает прн се вращении действия сил на опоры; следовательно, вращающиеся массы следует уравновешивать и динамически.
На рис. 61,а изображены две равные по величине массы, находящиеся на расстоянии от оси вращения {у — у) и лежащие в одной плоскости. Центр тяжести этой системы находится на оси вращения, т. е. система статически уравновешена. При вращении вата возникают центробежные силы, образующие пару сил с моментом
М0 = гщ>пм[и...
От действия пары сил на опорах появляются дополнительные реакции.
Рн-р-тр^'Л.
В коленчатых ватах вращающиеся массы уравновешиваются прн помощи противовесов (рис. 61,6). 122
Если Af„ — суммарная неуравновешенная масса одного колена н вращающихся частей кривошнпио-шатунного механизма, центр тяжести которой находится на расстоянии RH от оси вращения, тг и ш, — массы противовесов, расположенных на радиусах ра и р,, то уравновешивание произойдет в том случае, когда будут выполнены условия статической и динамической уравновешенности. При статической уравновешенности
Мя#яш«-f m,p,(i>l -f mjpjo»; = О
нлн
MmR„ + т,р, + лзд = 0.
При динамической уравновешенности сумма всех моментов
 а — асурмиомоемяо*: 0 — урмиомикииов
а — асурмиомоемяо*: 0 — урмиомикииов
|
Уравнение моментов относительно плоскости вращения массы Мн:
//1|р,ш!а, -f т./».<!);/>, — 0
нлн
m, р,а, +mtp3bt = 0.
Из полученных выражений следует, что равнодействующая центробежных сил противовесов и равнодействующая центробежных сил массы колена н вращающихся частей крнвошипно-шатунного механизма должны быть равны по величине н направлены в противоположные стороны.
Размеры противовесов и их расположение выбирают из конструктивных соображений.
Уравновешивание одноцилиндрового двигателя. Центробежная сила Р( вращающихся частей может быть полностью уравновешена центробежными силами противовесов, устанавливаемых на продолжении щек коленчатого вала.
Силы Р) инерции возвратно-поступательно движущихся масс направлены вдаль оси цилиндра и поэтому не могут быть палностью уравновешены центробежными силами противовесов, установленных на каленчатом валу.
Эти силы определены выше:
cosa*
и
Я/ = hnjRKp<s>\ cos 2аж.
Рассмотрим уравновешивание сил инерции первого порядка. Для полного уравновешивании силы инерции необходимо, чтобы массы противовеса тяр и радиус ряр вращения его центра тяжести удовлетворяли условию •
тяр • рпр = mjRKp.
В этом случае сумма проекций сил: на горизонтальную ось
Rx = m„ppMpa>]l sin а/.
на вертикальную ось
Ry = тjRKpo)I- cos а„ - тнрркр<й*к cos ак = 0.
Таким образом вместо вертикальной силы, действующей на опоры двигателя, получим равную по величине горизонтальную силу Rx.
Так как при uh. = 90° sin a, = 1. то
Rx = — 'Ппр9пр«у< = — mjRKp4i\-
В мотоциклетных одноцилиндровых двигателях обычно уравновешивают талько часть вертикальной силы инерции первого порядка, т. е.
"ЧРя/о!;= А„ m,RKI,ial.
где Аур — коэффициент уравновешенности двигателя, величина которого находится в пределах 0,45—0,6.
Правильно выбрать коэффициент Аур во время проектирования двигателя весьма трудно, потому что на вибрацию влияют многие факторы (конструкция опоры двигателя, жесткость рамы, вес мотоцикла, двигателя и т. п.).
При предварительном расчете противовесов задаются наибольшим значением Аур, так как в процессе доводки двигателя обычно легче уменьшить iipoTHBoeecbi, чем их увеличить.
Силы-инерции второго порядка в мотоциклетных двигателях не уравновешивают. Их величина изменяется через каждые пол-оборота коленчатого вала, поэтому для их уравновешивания требуется специальный механизм.
Уравновешивание двухцилиндровых двигателей с параллельными цилиндрами. При таком распаложеннн цилиндров шатунные шейки могут располагаться: 1) на одной оси, т. е. кривошипы расположены под углом 360° (рис. 62,а); 2) в одной плоскости, но под углом 180' (рис. 62,6).
В первом случае поступают так же, как и прн уравновешивании одноцилиндрового двигателя, только вместо т< и т) берут их удвоенную величину (так как кривошипно-шатунных механизмов—два).
Во втором случае поршни всегда движутся в противоположных направлениях. Поэтому силы инерции первого порядка равны
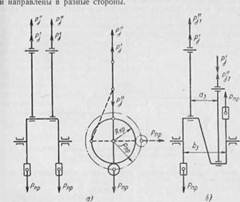 Рис. 62. Схема уравновешивания двухцилиндровых двигателей с параллельными цилиндрами: а — иитумиыс о«1кя леж«т ил одной оск б — шатуииые шейки помряуты оди» отиосятельмо другой под углом 180*
Рис. 62. Схема уравновешивания двухцилиндровых двигателей с параллельными цилиндрами: а — иитумиыс о«1кя леж«т ил одной оск б — шатуииые шейки помряуты оди» отиосятельмо другой под углом 180*
|
Силы инерции первого порядка создают свободный момент, равный
Л10 = mjRfptol cos a^j.
Его можно уравновесить двумя противоположно расположенными противовесами, массу которых определяют, пользуясь уравнением
тлрРнрш<Ьа COS OLK = ГП jR„p<0K COS <ZhX23\ тЯ{рпр = т)
Но в этом случае возникает свободный момент в плоскости, перпендикулярной к оси цилиндров:
М; = т„рsin aLa,.
Величина и период этого момента изменяются так же, как н для Л10, поэтому массу и радиус центра тяжести противовеса определяют так же, как н прн уравновешивании сил инерции в одноцилиндровом двигателе, т. е. уравновешивают только часть момента Л1, (75°о).
Центробежная сила массы mt создает постоянный по величине момент /И, m,RKfula„ и поэтому массу и радиус вращения цент-

|

|
is «1
.Тчт.
Рис. 63. Схема уравновешивания двухцилиндрового двигателя с противолежащими цилиндрами
ра тяжести одного противовеса можно определить, пользуясь формулой
"МЧ> = К + 0,75т,).
Уравновешивание двухцилиндрового двигателя с противолежащими цилиндрами (рис. 63). В двигателе силы инерции возвратно-поступательно движущихся масс первого и второго порядков в каждый момент времени равны по величине и направлены в разные стороны.
Эти силы инерции, как и центробежные силы Р( вращающихся масс, создают свободный момент
М,-(Р/ + Р,)а4-
Момент М, может быть частично уравновешен так же, как и в предыдущем случае; однако прн этом рекомендуется уравновешивать 50—55% момента, возникающего от сил инерции Pt.
Массу и радиус вращения центра тяжести одного противовеса можно определить по формуле
= {pie + 0,5т/)
Сравнивая уравновешенность двухцилиндровых двигателей с противолежащими и параллельными'цилиндрами при угле между коленами вала 180:, отмечаем, что в первом случае уменьшение величины а, не ограничивается размерами цилиндров! а зависит от конструкций коленчатого вата, что допускает выполнение двигателя с очень небольшим расстоянием между осями цилиндров.
Это обстоятельство наряду с нашим уравновешиванием сил инерции второго порядка и равномерным чередованием рабочих ходов делает двигатель с противатежащими цилиндрами лучшим из четырехтактных двухцилиндровых мотоциклетных двигателей по уравновешенности и равномерности работы.
Уравновешивание V-образных двухцилиндровых двигателей. Как и во всех предыдущих случаях, центробежная сила вращающихся масс крнвошиппо-шатун- ного механизма уравновешивается пашоегью массами противовесов.
Силы инерции возвратно-поступательно движущихся масс, направленные вдоль осей соответствующих цилиндров, определяют по формулам:
первого цилиндра PJX а—mjRg/iul (cos ак+X cos 2аj;
второго цилиндра PJt = — m,RKpto i [cos (a, - y) + + Xcos2(a,- y)J.
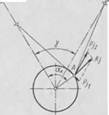
Результирующую этих сил легче всего определить графически (рис. 64).
Чтобы найти оптимальные размеры противовеса, уравновешивающего эту силу, можно патьзоваться векторной диаграммой неуравновешенных сил инерции (рис. 65). Диаграмму строят следующим образом. Проводят (в пронзва1ьном масштабе) окружность радиусом, равным по величине уравновешиваемой центробежной силе вращающихся масс. Затем окружность делят на произвольное число частей, например на 12. В каждой из патучиных точек складывают силы инерции Р tx и Р)х возвратно-поступательно движущихся масс, соответствующие углу а, поворота катенчатого вала.
| „Brim |
| Вмт^ |
| Рис. W. Схема уравновешивания двухцилиндрового V-образного двигателя |
Соединяют концы всех полученных таким образом равнодействующих Rx, RtRz» т. д. кривой, "радиусы-векторы которой изображают в принятом масштабе суммарную неуравновешенную силу, действующую на опоры двигателя. В патучеиную кривую вписывают окружность, показанную штриховой линией, раднус которой соответствует
силе Р0, постоянной по величине, действующей вдаль кривошипа, которая может быть полностью уравновешена силами инерции противовесов, установленных на коленчатом валу.
Силы, действующие на опоры двигатели, представленные на диаграмме отрезками, ограниченными внешней кривой и окружностью, проведенной штриховой линией, уравновешивают так же, как н силы инерции в одноцилиндровом двигателе, т. е. частичным перенесением их в горизонтальную плоскость.
Дли определения массы т'пр части противовеса можно пользоваться формулой
m*,4>npul = K>m;RKy<.
где Кг — коэффициент уравновешивания (прн у = 60г =- |; при у = 90° Ку = 0).
Массу тяр и радиус р„р противовесов v-образного двухцилиндрового двигателя определяют по формуле
т*рр*р = KxmjR<p -f ^.
к
Рассматривая векторную диаграмму неуравновешенных сил инерции V-образного двухцилиндрового двигателя, можно заметить, что с увеличением угла y между осями цилиндров внешняя кривая все больше стремится к окружности.
Рассмотрим частный случай, когда угол у a 90°. Результирующая сила инерции первого порядка
R) = У m)Ripv[ cos* ак + /ИЩ^с cos* (a, -f 270). Преобразуя это выражение, получим R'j = mjRKpoil.
Неуравновешенная сила инерции первого порядка постоянна по величине и направлена по кривошипу, а следовательно, может быть полностью уравновешена.
Складывая таким же образом силы инерции второго порядка, получим результирующую
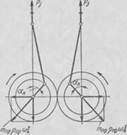
 Рис. 65. Векторная диаграмма сил, действующих в двухцилиндровом V-o6 разном двигателе (при у=60°): /, II — оси цилиндров
Рис. 65. Векторная диаграмма сил, действующих в двухцилиндровом V-o6 разном двигателе (при у=60°): /, II — оси цилиндров
|
Rj = ш jRKPv>\ У 2 cos 2ак.
Результирующая сила инерции второго порялка всегда лежит в горизонтальной плоскости и может быть уравновешгна только противовесами, которые вращаются со скоростью, вдвое большей, чем коленчатый вал.
Из вышеуказанного следует, что двухцилиндровый V-образный двигатель с углом между осями цилиндров, равным 90°. хорошо уравновешен. Однако на мотоциклах такие двигатели применяют очень редко из-за трудности их расположения на раме н большой неравномерности хода, которая вызвана неравномерным чередованием рабочих ходов.
Уравновешивание двухцилиндровых двигателей с отдельными коленчатыми валами, связанными при помощи шестерен. В этом случае кривошипы вращаются навстречу один к другому, что значительно уменьшает нагрузку на коренные подшипники.
Центробежные силы инерции вращающихся масс каждого кри- вошнпно-шатунного механизма уравновешивают отдельно, так же как и у одноцилиндрового двигателя.
Для уравновешивания сил инерции возвратно-поступательно движущихся масс на каждый коленчатый вал устанавливают противовесы, удовлетворяющие условию (рис. 66):
ШпеРпрЫк — nijRKpU)\.
Рис. 66. Схема уравновешивания двух-
Спроектируем на горнзон- цилиндрового двигателя с двумя ко- тальную ось силы инерции воз- ленчагами валами
вратно-поступательно движущихся масс и центробежную силу уравновешивающих их противовесов:
Рх = тпррпр<й\ sinак - тяррпры\ sin ак «= 0.
Сумма проекции этих сил на вертикальную ось
|
Pr = 2Pj- 2тяррярй£ cos cce = 2тjRKp(ol cos ак -f + 2hn/RKp<o* cos 2aK - 2тярряри>\ cos <xK или, согласно условию, приведенному выше, Ру = 2 Am jRKP<al cos 2а„.
Отсюда следует, что в таких двигателях можно уравновесить центробежные силы вращающихся масс и силу инерции возвратно- поступательно движущихся масс первого порядка. Для этого не-
0 Наавмцкмй и др.
обходимо установить на каждый нз коленчатых валов противовесы, масса которых и радиус вращении центра тяжести удовлетворяют условию
Рассмотренные двигатели почти не уступают по уравновешенно- пи и по равномерности хода двигателям с противоположно расположенными цилиндрами, но их применяют редко из-за трудности
изготовления бесшумно fjvtf^Mt работающих шестерен, которые связывают коленчатые валы.
Если оси цилиндров образуют между собой некоторый угол у (на- \\ * пример,Л-образныйдвн- гатель С2Б), двигатель уравновешивают таким образом, как и при па- и, раллельном расположе- V "Р нни цилиндров, с той лишь разницей, что масса поступательно.движущихся частей должна
(рис. 67).
Полностью уравновешивается также сила инерции возвратно- поступательно движущихся масс первого порядка. Результирующая сил инерции всегда направлена по вертикальной оси симметрии
Р,=2ЦН, poicos2a(cos|.
| Рис. 61, Ciena уриномшшш Лфш у, у|Ш0М наС(Л двигателя ' 2 |
В заключение следует заметить, что плавность работы двигателя н отсутствие вибрации в большой степени зависят от качества балансировки двигателя. Коленчатые валы двигателей балансируют с большой точностью (5-10 Г -4 При этом на шатунные шейки надевают специальные грузы, масса которых равна массе уравновешиваемых частей крнвошнпно-шатуниого механизма. Дннамнчс' скую балансировку коленчатых валов можно производить на специальных станках, автоматически указывающих величину лишней массы противовесов.
Глава X
КОНСТРУКЦИЯ И РАСЧЕТ ДЕТАЛЕЙ ДВИГАТЕЛЯ
§ 56. ЦИЛИНДР И ГОЛОВКА ЦИЛИНДРОВ
Цилиндр. В цилиндре совершаются все процессы рабочего цикла двигателя.
Наиболее простую конструкцию имеют цилиндры четырехтактных двигателей с верхним расположением клапанов. Рабочая поверхность, или зеркало 3 цилиндра (рис. 68), служит для направления движения поршня. На наружной поверхности цилиндра имеются ребра 2, увеличивающие поверхность соприкосновения цилиндра с наружным воздухом для лучшего охлаждения. Фланцем I цилиндр устанавливают на картер, а к фланцу 4 крепят головку цилиндра.
Цилиндр можно крепить к картеру отдельно нлн вместе с головкой. В первом случае в картер ввертывают короткие шпильки, которые проходят через отверстия нижнего фланца цилиндра. Головку крепят отдельно к верхнему фланцу цилиндра. Во втором случае в картер ввертывают длинные шпильки, проходящие через отверстия цилиндра и головки.
Цилиндры изготовляют в большинстве случаев из чугуна, однако часто применяют также цилиндры из алюминиевого сплава с запрессованными нлн залитыми чугунными гильзами. Цилиндры из алюминиевого сплава устанавливают для уменьшения веса и улучшения охлаждения. К преимуществу алюминиевого цилиндра следует отнести возможность отливки его в пресс-форму на литейной машине, что значительно уменьшает трудоемкость его изготовления.
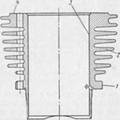 Рис. 68. Цилиндр двигатели М-63 с верхним расположением клапанов
Рис. 68. Цилиндр двигатели М-63 с верхним расположением клапанов
|
О» 131
С точки зрения охлаждения наилучшим способом изготовления алюминиевого цилиндра является так называемый «альфнн-проиесс» и «альфер-процесс». При изготовлении цилиндра по этим способам между поверхностью чугунной гильзы и алюминиевой рубашки располагается тонкий переходный слой, где молекулы железа и алюминия находятся в непосредственном контакте. Однако этот способ имеет свои технологические трудности, ввиду чего не все заводы его применяют.
Цилиндры с запрессованными или залитыми гильзами почти не имеют преимущества перед чугунными цилиндрами с точки зре
|
ния охлаждения, но сохраняют два другие очень важные преимущества — уменьшение веса и возможность отливки в пресс-форму. Иногда применяют цилиндры из алюминиевого сплава с хромированной рабочей поверхностью (без чугунной гильзы). Несмотря на малый вес цилиндра и улучшенную теплоотдачу такие цилиндры не получили широкого распространения из-за технологических трудностей.
Цилиндр при боковом расположении клапанов сложен по форме и неравномерно нагревается при работе. Поэтому он сильно деформируется и неравномерно изнашивается. Трудность охлаждении цилиндра является одним из главных недостатков двигателей с боковым расположением клапанов, ввиду чего их применяют на мотоциклах все реже.
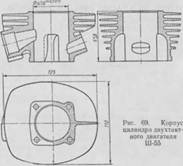
Цилиндр двухтактного двигатели, кроме своего основного назначении, является также главной деталью газораспределения. На рис. 69 и 70 изображены корпус н гильза цилиндра современ- 132
ного двухтактного двигателя. Конструкция цилиндра предусматривает отливку в металлическую форму. Каналы газораспределения заканчиваются на зеркале цилиндра окнами, размеры и расположение которых обусловливают мощность двигателя.
Рабочую поверхность цилиндра тщательно обрабатывают на специальных станках прн помощи абразивного инструмента (хонннг- процесс). Цилиндры изготовляют с точностью до 0,03 мм. На сборку цилиндры поступают рассортированными на три группы; в пределах одной группы точность равна 0,01 мм.
 Рис. 71. Головка цилиндра двигателя 111-55
Рис. 71. Головка цилиндра двигателя 111-55
|
Головка цилиндров. В головках цилиндров располагается камера сгорания
 Рис. 70. Гнльза цилиндра двигателя 111-55
Рис. 70. Гнльза цилиндра двигателя 111-55
|
(рис. 71), имеется отверстие для свечи зажигания, ребра охлаждения и отверстия для крепления к цилиндру. Головка цилиндра двухтактного двигателя иногда имеет отверстие дли декомпрессора. Головки цилиндров этих двигателей изготовляют из алюминиевого сплава.
В головке цилиндра четырехтактного двигателя с верхним расположением клапанов имеются впускные и выпускные каналы, клапаны, пружины клапанов, а также другие детали механизма газораспределения (рис. 72). Головки двигателей с верхним расположением клапанов изготовляют из чугуна и алюминиевых сплавов.
На двигателях спортивных и гоночных мотоциклов применяют головкн только из алюминиевых сплавов.
Стенки цилиндра нагружаются силой давления газов и боковой силой Nmtx. Сила давления газов вызывает в кольцевом сечении стенки цилиндра напряжение разрыва, а боковая сила \'шлх создает
изгибающий момент где а — расстояние центра приложения
этой силы от фланца цилиндра. Так распределяются нагрузки на цилиндр при креплении его к картеру короткими шпильками через фланец
Расчет цилиндра по образующей не производится ввиду того, что напряжения, возникающие'в этом сечении, незначительны из-за большого количества охлаждающих ребер.
Дата публикования: 2014-10-19; Прочитано: 386 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
