 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Теорема (следствие) 1. Проекции скоростей двух точек тела на прямую, соединяющею эти точки, всегда равны
|
|
Рассмотрим две произвольные точки А и В тела. Принимая точку А за по-люс, получим  . Отсюда, проецируя обе части равенства на линию АВ и учитывая, что вектор
. Отсюда, проецируя обе части равенства на линию АВ и учитывая, что вектор  перпендикулярен к АВ, находим
перпендикулярен к АВ, находим

Эта теорема позволяет легко находить скорость данной точки тела, если известны направление движения этой точки и вектор скорости другой точки того же тела.
Теорема (следствие)2. Концы векторов скоростей точек неизменяемого отрезка лежат на одной прямой и делят эту прямую на части, пропорциональные расстояниям между соответствующими точками отрезка.
Исходя из теоремы о скоростях точек при плоском движении тела, имеем


Тогда  и
и  и, следовательно,
и, следовательно,
 или
или  .
.
Т.к.  и
и  как противоположные стороны параллелограммов, то
как противоположные стороны параллелограммов, то  . Это соотношение показывает, что
. Это соотношение показывает, что  - отрезок прямой. Из подобия
- отрезок прямой. Из подобия  и
и  имеем
имеем
 или
или  и
и  ,
,
т.е. расстояния между концами векторов скоростей пропорциональны расстояниям между соответствующими точками.
Задача 1. Для механизма, изображенного на рис., найти скорость точки В, если скорость точки А равна  , угол
, угол  .
.

Решение. При движении ползуна А в направлении  колесо катится вправо и точка В имеет скорость
колесо катится вправо и точка В имеет скорость  . Углы
. Углы  и
и  образованы векторами и с прямой АВ. При = =45°
образованы векторами и с прямой АВ. При = =45°  , откуда
, откуда  .
.
Задача 2. Кривошип ОА (рис. 13.12) длиной 1 м вращается с угловой скоростью  = 2рад/с. Определить скорость точки В.
= 2рад/с. Определить скорость точки В.
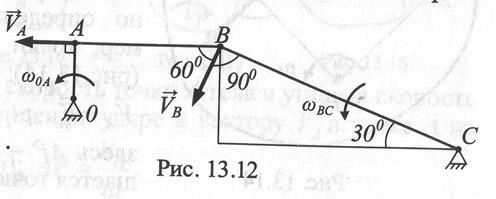
Решение. При заданном направлении вращения кривошипа ОА его скорость будет определяться вектором . Величина скорости =  м/с.
м/с.
Кривошип ВС при этом будет вращаться вокруг точки С угловой скоростью  , и скорость точки В определится вектором .
, и скорость точки В определится вектором .
 , откуда
, откуда  м/с.
м/с.
Дата публикования: 2014-11-18; Прочитано: 564 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
