 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Расчет на долговечность. 4 страница
|
|
Расчет зубьев червячного колеса на изгиб

£ [d]F МПа, где Ye – коэффициент, учитывающий суммарную длину контактных линий, Yd – коэффициент, учитывающий угол охвата, Yg – коэффициент, учитывающий форму зуба (зависит от приведенного числа зубьев ZV), K – коэффициент нагрузки.
В передачах с большим передаточным числом (больше 70), а также открытые передачи при проектировании рассчитываются по изгибной прочности зубьев (по модулю):

Допускаемое напряжение изгиба определяется из условия предотвращения усталостного излома зубьев. Расчет [d]F базируется на кривых усталости:

[d]Fm × N = const, m=9
[d]F = (dFO / SF) ×KFL, где dFO – реверсивные нагрузки, SF – коэффициент безопасности, KFL – коэффициент долговечности

NFE – эквивалентное число циклов, NHO – базовое число циклов. NFE = NS×m9,
NS = 60× n2 × Lh – суммарное число циклов.
Методы повышения изгибной прочности
При сохранении габаритов и материалов:
– увеличение модуля зацепления с одновременным уменьшением коэффициента диаметра червяка q;
– применение положительного инструмента для нарезания зубьев;
– повышение точности обработки колес и выбор режима смазывания колес
Проверка червяка на прочность и жесткость
q = 0,25z2
q < 0,212 z2 Þ проверка на жесткость червяка
Червяк можно принять как 2-х опорную балку
dU=MU/W = MU / 0,1dW13
tКР = T1/WP = T1 / 0,2dW13
Проверка прочности по эквивалентным напряжениям
 £[d]-1
£[d]-1
Жесткость червяка оценивают величиной его прогиба в среднем сечении
 £[y]
£[y]
L – расстояние между опорами
Тепловой расчет и охлаждение редуктора
Расчет при установившемся тепловом состоянии производят на основе теплового баланса, т.е. приравнивая тепловыделение теплоотдаче. По тепловому балансу можно определить температуру масла, которая может передаваться червячной передаче.
PВЫДЕЛ = PОТД
PВЫДЕЛ = P1×(1 – x) × 1000
PОТД = K×A×(1+y)×(tУСТ – t0), где
P1– мощность на червяке,
x – КПД редуктора
K – коэффициент теплоотдачи
А – свободная площадь поверхности
y – коэффициент, учитывающий теплоотвод, фундаментную плиту или раму привода
t0 = 20°C – комнатная температура
 £[t]
£[t]
Способы предотвращения перегрева
1. изменение корпуса (ребра жесткости, которые выбирают из условия лучшего обтекания воздухом). При естественном охлаждении в соответствии с тем, что нагретый воздух идет вверх, ребра располагают вертикально.
2. установка вентилятора на валу червяка (ребра располагают вдоль направления потока)
3. установка масляного радиатора
4. установка в масляную ванну змеевика, по которому пропускают проточную воду
ВАЛЫ И ОСИ
Валы предназначены для:
1) поддержания вращающихся деталей
2) для передачи вращающегося момента
3) восприятия изгибающих нагрузок и кручения
Оси:
1) не передают полезного вращающегося момента
2) воспринимают только изгибающий момент
Составные части вала
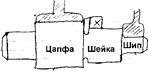
Контактирующую часть вала с корпусом или насаженными деталями называют цапфой.
Цапфу, расположенную на конце вала называют шип.
Промежуточная часть вала называтся шейкой.
Шип, передающий осевые нагрузки называют пятой.
Классификация валов и осей
По назначению:
– валы передач
– коренные валы машин (несущие)
По геометрической форме:
– прямые
– коленчатые
– гибкие
По форме и конструктивным признакам прямые валы и оси бывают:
– постоянного диаметра
– ступенчатые
Также могут быть сплошными и полыми.
Применяемые материалы
– для малоответственного соединения Ст5
– для валов с термообработкой Ст45 и т.д.
– для быстроходных валов цапфы цементируют для повышения износостойкости
– для валов-шестерней материал выбирается из расчета зубчатой передачи
Закрепление деталей, устанавливаемых на валу
Закрепление деталей на валах производится в осевом и тангенсальном направлениях.
Закрепление в тангенсальном направлении необходимо для передачи вращающегося момента. Производится шпонками, шлицами, штифтами, посадками с натягом.
Для закрепления в осевом направлении используются конструктивные элементы балок – заплечики, буртики, а также втулки, штифты, установочные кольца, стопорные шайбы.

Концентрация напряжений на валах
Обусловлено следующими факторами:
1) конструктивным, т.е. канавками, шпоночными пазами, отверстиями, галтелями и т.д.
2) технологическим, т.е. грубость обработки, дефекты заготовки и т.д.
Kd и Kt – коэффициенты концентрации напряжений. Возрастают с увеличением предела прочности материала вала или оси, увеличением натяга, уменьшением радиуса галтели.
Меры снижения концентрации напряжений
1) Конструктивные,
a) увеличение радиуса галтели
б) увеличение длины ступицы по сравнению с посадочной величиной паза
в) поднутрение заплечика (увеличивает длину базирования ступицы)

2) Технологические – создание в наружных слоях вала остаточных напряжений сжатия путем азотирования, цементации, обдувки и т.д.
Критерий работоспособности валов и осей
1) статическая прочность
2) сопротивление усталости
3) жесткость (изгибная и крутильная)
4) виброустойчивость
Оси работают только на изгиб
dИЗГ = M/WP £ [d]ИЗГ
Валы работают на изгиб и на кручение
Проектирование вала
Производится в 3 этапа:
1) Определение исходного диаметра вала из расчета на кручение
dВАЛА = С × 3ÖT = 3Ö(T / 0,2[t])
2) Конструирование вала (эскиз)
Виды нагрузок на вал
Нагрузки на вал могут быть не вращающимися и вращающимися вместе с валом.
1) не вращающиеся – силы от зубчатых передач, ременных, цепных
2) вращающиеся оказывают постоянное действие на вал.
Проверочный расчет вала

При проверочном расчете вала определяют запасы прочности в опасном сечении.
Коэффициент перегрузки КП = 2 × TПУСК/TНОМ.
a) проверка на статическую прочность
Запасы прочности по пределу текучести но нормальным и касательным напряжениям:


Коэффициент запаса прочности по пределу текучести при совместном действии изгиба и кручения

б) проверка на усталостную прочность
Суммарное число циклов нагружения за ресурс вала:
NS = 60×n × nЗ × Lh, где
Lh – ресурс работы передачи,
nЗ– число зубьев зацеплении,
n– частота вращения.
Приведенное число циклов нагружения: NE = NS ×mH, где mH – режим работы, mНАПРЕССОВКИ = 6, mПРОЧИЕ КОНЦЕНТРАЦИИ = 9
Коэффициент долговечности:

в) параметры цикла изменения напряжения
При расчете вала на изгиб момент изменяется по симметричному циклу
При расчете вала на кручение вращающийся момент изменяется по отнулевому циклу:
Коэффициент понижения допускаемых напряжений


Запасы прочности по пределу выносливости


Расчет вала на прочность

dU = MU/W
tКР = T/WP
ПОДШИПНИКИ КАЧЕНИЯ
Преимущество подшипников качения по сравнению с подшипниками скольжения:
1. меньше потери на трение
2. меньше осевые габариты
3. проще в обслуживании
4. дешевле
Недостатки:
1. значительнее диаметральные размеры
2. хуже воспринимают ударные нагрузки, вследствие линейного или точечного контакта
3. имеют ограничения по частоте вращения
4. подшипники не разъемные
Классификация подшипников качения

По направлению воспринимающей нагрузки:
– радиальные (только радиальную нагрузку)
– радиально-упорные и упорно-радиальные (воспринимают радиальную и осевую нагрузку)
– упорные – воспринимают только осевую нагрузку)
По форме тел качения и числу их рядов:










0 – шариковый однорядный
1 – шариковый, двухрядный
2 – роликовый с короткими цилиндрическими роликами
3 – роликовый, самоустанавливающийся (сферический) с бочкообразными роликами
4 – роликовый (игольчатый) с длинными цилиндрическими роликами
5 – роликовый с витыми цилиндрическими роликами
6 – шариковый радиально-упорный
7 – роликовый конический радиально-упорный
8 – шариковый упорный подшипник
9 – роликовый упорный подшипник
В зависимости от размеров и нагрузочной способности подшипники делятся на серии: 1-а и 7-ая – особо легкая, 2-ая серия – легкая, 3-ая – средняя, 4 – тяжелая, 5-ая серия, 6-ая серия – средняя широкая, 8-ая и 9-ая – сверхлегкая.
Также существует 5 классов точности: 0, 6, 5, 4, 2.
Материалы подшипников
Кольца и тела качения изготавливают из хромистых материалов или хромоникелевых, с твердостью от 61 до 66 HRC. Сепараторы делают из бронзы, стали, латуни и текстолита.
Виды разрушений
1. усталостное выкрашивание рабочих поверхностей тел качения и беговых дорожек колец
2. местные остаточные деформации на беговых дорожках
3. абразивное выкрашикание
4. задиры рабочих поверхностей
5. поломка колец и сепараторов.
Подбор подшипников качения
Подшипники подбирают из каталога по динамической и статической грузоподъемности.
Основы расчета подшипников качения
Подшипники рассчитываются по усталостному выкрашиванию и местной статической прочности. Расчет базируется на кривых усталости.

dHm ×N = C1
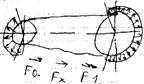
Определение максимальной нагрузки на тело качения

F = F0 + 2F1×cos(2×g) + … + 2Fn×cos(n×g),
где g = 360 / z –угловой шаг, z – число тел качения. Если все тела качения одинаковых размеров и радиальный зазор тоже одинаков можно, то F1=F2=… = F0 × cos3/2 g. F0 =K×F/Z,
K – коэффициент, определяемый геометрией подшипника.
Формула Герца-Беляева для подшипников имеет вид:

E – модуль упругости; r – относительное давление; ℓ – длина ролика;
С2 = const – коэффициент для определенного типа подшипника.
dm ×N = C1, N = CЗ × L × 106, L – число миллионов оборотов подшипника за срок службы, СЗ – коэффициент, определяемый кинематикой движения подшипника. L = (C/F)P, F – эквивалентная динамическая нагрузка; С – динамическая грузоподъемность, которую подшипник может выдержать в течении 1 млн. оборотов; p – степенной показатель, равный половине показателя степени в уравнении кривой усталости, т.е. p=m/2.
Подшипник одновременно может быть нагружен осевой и радиальной нагрузками, поэтому подбор подшипников проводят по эквивалентной нагрузке: CТРЕБ = L1/p ×FR £ CR (по каталогу).
Различают динамический и статический режим нагружения подшипника.

Под статической грузоподъемностью понимают такую статическую нагрузку, при которой соответственно общая остаточная деформация тел качения и колец в наиболее нагруженной точке контакта равна 0,0001 диаметра тела качения.
Долговечность или ресурс работы подшипника выражается как
Lh = 106 × L / 60n, LТР = 60Lh / 106.
Гамма -процентный ресурс – 90% должны проработать без проявления признаков старения (усталости)

Определение эквивалентной динамической нагрузки
Эквивалентная динамическая нагрузка – условная постоянная нагрузка, при которой обеспечивается та же долговечность, которую подшипник имеет при реальной нагрузке.
Эквивалентная динамическая радиальная нагрузка FR для радиальных шариковых и радиально-упорных шарико- и роликоподшипников FRЭ = (X×V×Fr + Y×Fa)× KБ × KT, где
Fr – действующая радиальная нагрузка;
Fa – расчетная осевая нагрузка. Для радиальных шарикоподшипников это действительная осевая нагрузка FX;
X, Y – коэффициенты радиальной и осевой нагрузки, V – коэффициент вращения;
КБ – коэффициент безопасности, учитывающий характер нагрузки;
КТ – температурный коэффициент
Для радиальных роликовых подшипников FRЭ = Fr ×V×KБ ×KT. Эквивалентная динамическая нагрузка для упорных шарико- и роликоподшипников FaЭ = FX × KБ×KT
Определение расчетной осевой
нагрузки

Приложенная к радиально-упорному подшипнику радиальная нагрузка вызывает появление осевой составляющей FE, величина которой зависит от угла контакта £. Fe для шарикового радиально-упорного подшипника равна Fe=eFr, а для роликового Fe = 0,83 Fr. Параметр осевой нагружения характеризует степени влияния осевой нагрузки на грузоподъемность подшипника. Опорная база подшипника
h = 0,5 × (T + (d+D)/2 ×tg £). Для конических роликовых h = 0,5T + (d+D)/6 × e
Порядок определения нагрузки
Определяют алгебраическую сумму всех осевых сил на подшипник. При этом со знаком «+» берут все силы, уменьшающие зазор в подшипнике, со знаком «–» его увеличивающие.

Если сила меньше или равна 0, то FA на этот подшипник равна осевой составляющей от его радиальной нагрузки.
Если сумма >0, то FA равна алгебраической сумме внешних осевых сил и осевой составляющей радиальной нагрузки противоположного подшипника.
Подбор подшипника при переменных нагрузочных режимах
Подшипники, работающие при переменных нагрузках и частотах вращения проверяют по приведенной динамической нагрузке, которая для радиальных шариковых и радиально-упорных шариковых, а также роликовых подшипников равна FR = (XVFr + YFa) × KБ×KT×KH при Fa / ÖFr > e и
FR = VFr×KБ×KT×KH при Fa / ÖFr £ e
Если осевая сила не влияет на величину расчетной нагрузки, то X=Y=1
Для радиальных роликовых подшипников FR = VFr × KБ×KT×KH
Для упорно-радиальных
FA = (XFr + YFa)×KБ×KT×KH
Для упорных подшипников
FA = FX × KБ×KT×KH

L – число млн. оборотов.
Подбор подшипников по статической грузоподъемности
В шариковых и роликовых подшипниках статическая нагрузка определяется как F0 = X0 × Fr + Y0 × Fa или F0 = Fr, где X0, Y0 – коэффициенты радиальной осевой статической нагрузки.
При подборе должно выполняться условие F0 £ C0
Для радиальных шариковых F0 = Fr
Для упорных F0 = FX
РЕМЕННЫЕ ПЕРЕДАЧИ
Достоинства:
1. простота изготовления
2. лучшая вибро-пассивность
3. малый шум
4. могут служить предохранительным звеном
5. допускают бесступенчатое регулирование
6. обладают хорошими амортизирующими и демфирующими свойствами
7. возможность больших межосевых растояний
8. универсальность расположения валов и их количество в передаче
9. может одновременно выполнять функции муфты сцепления.
Недостатки:
1. большие габариты
2. малый КПД
3. малая долговечность
4. большие эксплуатационные расходы
5. непостоянство передаточного отношения.
Виды ременных передач
Относятся к передачи трением с гибкой связью. Состоит из 2-х или более шкивов и гибкой связи. Гибкой связью служит ремень прямоугольного, трапециидального или круглого сечения.
Различают виды ременных передач:
1. плоскоременные
2. клиноременные
3. многоклиновые
4. поликлиновые
5. круглоременные
Типы ременных передач

1. Открытая
2. Перекрестная
3. Полуперекрестная
Способы натяжения ремня
Для обеспечения необходимой силы трения между ремнем и шкивами ремень должен быть натянут. Существуют следующие методы:
1. за счет упругости ремня
а) укорочение прошивки
б) перемещение ведущего шкива, который расположен на валу электродвигателя, для чего электродвигатель ставят на салазки.
2) Автоматически
а) с помощью натяжного ролика, а также пружиной или грузом, воздействующим на качающийся ролик.
б) реактивным моментом, действующим на качающуюся сторону
Виды ремней
I. Плоские ремни. Применяют 2-х типов:
– прорезиненные бумажные и кожаные
– слойные сдвоенные

II. Клиновые ремни
Нагрузочная способность выше, чем у плоскоременных. Бывают 3-х видов:
– нормальные bp/h = 1,4
– узкие bp/h = 1
– широкие или вариаторные ремни
bp/h = 2…4

III. Многоклиновые

IV. Поликлиновые
Имеют клиновые ребра, работающие в канавках шкива.

V. Круглоременные ремни
Применяют для пространственных передач при нескольких ведомых шкивах.

Геометрия клиноременной передачи

d1, d2 – диаметры ведущего и ведомого шкивов, £1, £2 – углы обхвата на шкивах, g – угол наклона ветви ремня к оси центра, а – межосевое расстояние.
£1,2 = 180 ± 2g, «+» для большего, «–» для меньшего. g = arcsin[(d2 – d1) / 2a]

 amin =0,55 ×(d2+d1)+h, где h – высота сечения ремня
amin =0,55 ×(d2+d1)+h, где h – высота сечения ремня
amax = 2(d2+d1)
Силы и напряжения в ремне
1. Силы растяжения F1 и F2
2. Напряжение изгиба на шкивах (на ведомом меньше)
3. Напряжение, вызываемое силой предварительного натяжения F0= Ft = 2T1 / d1, d0 = F0 / A. Для плоскоременной передачи A = b × d, для клиноременной A = A1× z, где b – ширина ремня, d – его толщина, A1 – площадь сечения 1-го клиноременного ремня, z – число ремней
4. На холостом валу возникает центробежная сила FЦ = r × A × V2, где r – плотность, A – площадь, V – скорость.
5. Напряжение, вызываемое центробежной силой dЦ = FЦ / A= rV2.
Уравнение Эйлера

F1 – сила набегающей ветви;
F2 – сила сбегающей ветви;
a – угол обхвата
f ¢ – приведенный коэффициент трения
f ¢ = f / sin (j/2), где j – угол клина.
При прохождении ремнем шкива возникает напряжение изгиба
d = y × E / r, где E – модуль упругости, y – координата волокон ремня от нейтральной линии, r – радиус по нейтральной линии ремня.
Диаграмма напряжений в ремне

d max = d1 + dU = m ×dt / (m–1) + dU + dЦ,

Нагрузка на валы передачи


Коэффициент тяги:
y = (F1– F2) / (F1 + F2), y = Ft / 2F0, где Ft – полезная нагрузка, F0 – сила предварительного натяжения
Критерий работоспособности ременной передачи
Работоспособность ременной передачи может ограничиваться:
1. сцеплением ремня со шкивами (тяговая способность)
2. долговечность ремня
Тяговая способность зависит от предварительного натяжения F0 или d0, а также от материала ремня, угла обхвата, диаметра шкивов,
Долговечность ремня зависит от сопротивления усталости его элементов

dPmax × NE = const, где p – степень кривой усталости, p = 11 для клиноременной, p = 6 для плоскоременной.
NE = 3600 × U × Zm × Lh / xИЗГ
U – частота пробега ремня
Zm – число шкивов
xИЗГ – коэффициент, учитывающий разую степень изгиба на большом и малом шкивах,
Lh – ресурс работы
Потери в передаче и ее КПД
Потери:
1. на упругий гистерезис при переменном деформировании изгиба и растяжения
2. на скольжение ремня по шкивам
3. на трение в подшипниках валов передачи
4. на аэродинамическое сопротивление движения ремня и шкивов

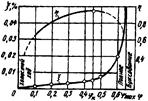
Зависимость скольжения от КПД:
Расчет ременных передач
Расчет производится по полезному напряжению или эталону мощности
K = Ft / (A1 × z) < [K] или p = KAV/1000
A1 – площадь поперечного сечения одного ремня, z – число ремней
[K] = K0 × C£ × CP, где K0 – определяется из условия обеспечения тяговой способности при оптимальном коэффициенте тяги y0 и долговечности NE или Lh
С£ – угол обхвата
СP – режим работы

 , где С – показат. долговеч.
, где С – показат. долговеч.
За базу выбирается эталонная передача с двумя шкивами с передаточном числом 1, a = 180°. Ремнем эталонной длины и имеющего эталонную скорость V при ресурсе работы Lh = 25 тыс. часов, работа спокойная, запас сцепления b = 1, 5.
Необходимое число ремней определяется по формуле z = Ft / ([K] × A1)
ЦЕПНЫЕ ПЕРЕДАЧИ
Состоит из ведущей и ведомой звездочек и охватываемой цепи. Применяются с двумя или несколькими звездочками.
Цепные передачи применяют при:
1. средних межосевых расстояниях, при которых зубчатые передачи требуют промежуточных ступеней или паразитных зубчатых колес
2. жестких требованиях к габаритам
Дата публикования: 2014-11-19; Прочитано: 375 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
