 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Асинхронні двигуни з короткозамкненим ротором
|
|
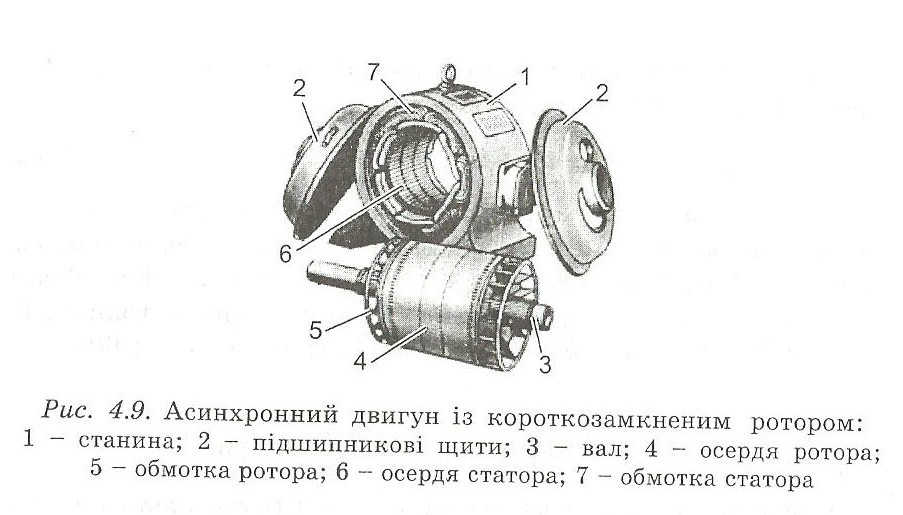
Асинхронні двигуни з короткозамкненим ротором (рис. 4.9) набули найбільшого поширення в електроприводах робочих машин. Доцільним є їх використання в складі такого електропривода, де:
- не потрібне регулювання швидкості в процесі роботи;
- допустиме незначне (як правило, не більше 10%) зниження швидкості при зміні навантаження від нуля до номінального значення;
- пуски здійснюються не часто;
- момент опору на час запуску електропривода значно менший від його значення при номінальному навантаженні; номінальна потужність не перевищує 400 кВт для низьковольтних двигунів або 8000 кВт для високовольтних двигунів.
До переваг асинхронних двигунів із короткозамкненим ротором можна віднести такі якості:
1. Простота конструкції та експлуатації. Як правило, обслуговування таких електродвигунів полягає лише в періодичній заміні мастила в підшипникових щитах.
2. Надійність у роботі та відносна простота ремонту. Ці електродвигуни не мають ковзного електричного контакту - основного елемента, що знижує надійність інших видів електродвигунів. Заміна обмотки статора, найменш надійного елемента цього електродвигуна, є відносно нескладною операцією.
3. Відносно малі вага, габаритні розміри та вартість.
4. Можливість прямого пуску. Цей вид пуску є найпростішим, оскільки відбувається при номінальній напрузі та потребує мінімуму пускорегулюючої апаратури.
До недоліків асинхронних двигунів з короткозамкненим ротором можна віднести такі характеристики:
1. Великі пускові струми (Іп). При прямому пуску і номінальному навантаженні вони можуть досягати (5+7) І ном.
2. Малі значення пускових (Мп) та мінімальних (Мтіп) по відношенню до номінальних моментів (Мном). Для значної частини електродвигунів Mп/Mhom = 1+1,2, що усклад нює чи навіть унеможливлює запуск електродвигуна при номінальному навантаженні.
3. Складність регулювання швидкості. Незважаючи на те що швидкість асинхронного двигуна з короткозамкненим ротором теоретично можна регулювати з допомогою трьох параметрів (частота напруги живлення, кількість пар полюсів і ковзання), на практиці її регулювання потребує або дорогого обладнання (наприклад, тиристорного перетворювача частоти для зміни частоти), або спеціального конструктивного виконання асинхронного двигуна (наприклад, багатошвидкісні двигуни, у яких можна змінювати кількість пар полюсів), або взагалі є неефективним (наприклад, зміною величини напруги живлення змінювати величину ковзання).
В електроприводах робочих машин найбільше часто застосовуються асинхронні двигуни з короткозамкненим ротором серій 4А, 4АМ та АИ, що мають такі граничні номінальні параметри:
· номінальна потужність:
- при напругах 220, 380, 660 В від 0,025 до 400 кВт; при напругах 6,10 кВ від 500 до 8000 кВт.
· синхронні частоти обертання: 500, 600, 750, 1000, 1500, 3000 об/хв.
Технічні дані деяких асинхронних двигунів із короткозамкненим ротором серії 4А наведені в додатках Б, В, Г, а більш повна інформація — у довідниках.
Дата публикования: 2014-11-18; Прочитано: 10254 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
