 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Роботы и робототехнические устройства
|
|
Эволюция современного общества и производства обусловила возникновение и развитие нового класса машин – роботов, и соответствующего научного направления – робототехники. Эта интенсивно развивающаяся научно-техническая дисциплина, изучающая не только теорию, методы расчета и конструирования роботов, их систем и элементов, но и проблемы комплексной автоматизации производства и научных исследований с применением роботов. Следует заметить, что термин "робототехника" используется и в другом контексте, означая совокупность техники (машин, оборудования, агрегатов и др.), оснащенной робототехническими устройствами либо функционирующей совместно с роботами в едином технологическом процессе.
Во все времена научная и производственная деятельность человека определялась, с одной стороны, потребностью развития и усовершенствования общественного производства как базы для достижения экономического могущества, с другой – необходимостью исследования и освоения новых нетрадиционных пространств и сфер деятельности.
История научных и научно-технических достижений, все развитие техники являются прекрасной иллюстрацией этапов этого непрерывного процесса. Возникновение и развитие роботов и робототехники - яркий пример реализации общественной потребности в коренном повышении эффективности производства, освоении новых пространств и сфер деятельности.
Одним из решающих факторов ускоренного развития в экономике становится интенсификация промышленного производства, основу которого на современном этапе научно-технического и социального развития общества составляют комплексная механизация и автоматизация. В этом направлении за последние годы в стране проделана немалая работа: созданы автоматизированные системы управления производством (АСУП), оснащенные ЭВМ, металлорежущие станки с программным управлением, обрабатывающие центры, специализированные автоматы и автоматические системы, роторные и роторно-конвейерные линии и др.
Термин «робот» впервые появился в 1920 г. в пьесе К. Чапека «R. U. R.» («Россумовские универсальные роботы»). Персонажами этой фантастической пьесы являются люди и сконструированные ими рабочие-автоматы – роботы. Вскоре понятие «робот» вошло в международную научно-техническую терминологию.
Фантастические идеи и образы роботов в древней и современной литературе во многом предвосхитили тенденции развития научно-технического прогресса. В настоящее время существует большое семейство различных роботов, которые облегчили труд или заменили людей на опасных для здоровья, монотонных и тяжелых физических работах. Процесс естественной эволюции этих принципиально новых средств автоматизации привел в последние годы к появлению адаптивных и интеллектуальных роботов, способных воспроизводить не только двигательные, но и мыслительные функции человека.
Что же такое роботы? Каково научно-техническое содержание этого понятия? Чем роботы отличаются от других автоматических систем?
Робот состоит из следующих элементов (рис.10.1):
1) системы связи;
2) информационной (сенсорной) системы;
3) управляющей (интеллектуальной) системы;
4) двигательной (моторной) системы.

Рисунок 10.1 – Структурная схема робота, взаимодействия с
окружающей средой
Система связи предназначена для обмена информацией между роботом и человеком, а также для связи с другими роботами и технологическим оборудованием. Цель такого обмена – передача заданий роботу, осуществление диалога между ним и человеком, контроль за его функционированием, диагностика неисправностей, регламентная проверка систем робота и т.д. Обычно информация от человека к роботу поступает через устройство ввода или с пульта управления. При этом чаще всего используется механическое воздействие (нажатие кнопки или клавиши, перемещение рукоятки и т.д.). В последнее время все шире применяются речевое управление, а также ввод информации с помощью биопотенциалов (биоуправление). Информация, поступающая от робота к человеку, как правило, имеет форму световых и звуковых сигналов и передается с помощью дисплеев, телевидения, синтезаторов речи и т.д.
Информационная, или сенсорная, система является по существу искусственными органами чувств робота. Она, как и органы чувств человека, предназначена для восприятия и преобразования информации о состоянии внешнего мира и самого робота в соответствии с требованиями управляющей системы, играющей роль «мозга» робота. В качестве элементов сенсорной системы обычно используются оптико-электронные устройства, акустические датчики и гидролокаторы, лазерные и ультразвуковые дальномеры, тактильные, контактные и индукционные датчики, а также датчики положения скорости, сил и моментов, акселерометры и др.
Управляющая, или интеллектуальная, система – своеобразный «мозг» робота. Она служит для выработки законов управления приводами (двигателями) и механизмами двигательной системы на основе сигналов обратной связи от информационной системы. Другая важная функция данной системы – организация общения робота с человеком на том или ином языке, распознавание ситуаций и моделирование среды, планирование действий и принятие целенаправленных решений, программирование и оптимизация движений. «Мозг» роботов обычно реализуется на основе ЭВМ или микропроцессоров, содержащих широкий набор входных (аналого-цифровых) и выходных (цифро-аналоговых) преобразователей и интерфейсных каналов связи, число которых колеблется от нескольких десятков до нескольких тысяч. По этим каналам как по нервной системе передаются непрерывные (аналоговые) и дискретные (цифровые) сигналы. Адаптационные возможности и интеллектуальные способности робота определяются главным образом алгоритмическим и программным обеспечением его управляющей системы.
Совокупность описанных систем робота образует его информационно-управляющую систему. Эта система предназначена для обработки информации и непосредственного управления приводами и механизмами двигательной системы с целью организации активного взаимодействия робота с окружающей средой и выполнения заданий, сформулированных человеком.
Двигательная, или моторная, система характеризует динамические свойства робота, в частности его способность совершать разнообразные движения. Эта система служит для фактической отработки управляющих сигналов, формируемых информационно-управляющей системой. Тем самым обеспечивается возможность целенаправленного воздействия робота на окружающие объекты. В качестве конструктивных элементов двигательной системы обычно используются приводы (двигатели) и связанные с ними механические руки (манипуляторы), механические ноги (педипуляторы), тележки с колесным или гусеничным шасси, а также их комбинации. Двигательная система может также включать силовую лазерную установку, целенаправленно воздействующую на объекты окружающей среды, или устройство, манипулирующее объектами с помощью электромагнитного силового поля.
Таким образом, с точки зрения структуры робот представляет собой автомат, включающий в себя как обязательные элементы систему связи, информационную (сенсорную), управляющую (интеллектуальную) и двигательную (моторную) системы.
С функциональной точки зрения робот воспроизводит функции человека, занятого физическим или умственным трудом. Поэтому он выступает как универсальное средство автоматизации сенсорных, двигательных и интеллектуальных функций человека. Прежде всего это касается автоматизации таких видов деятельности человека, которые связаны с тяжелыми, монотонными, вредными для здоровья или опасными для жизни операциями. Так, манипуляционные роботы служат для автоматизации ручного труда, транспортные – для автоматической перевозки грузов в цехах или по пересеченной местности (например, по поверхности Луны или по дну океана).
Интеллектуальный робот, контролируя свое состояние и воспринимая объекты окружающей среды с помощью сенсорной системы, формирует в памяти управляющей системы образы этих состояний и объектов. По мере накопления и преобразовния информации он может с помощью человека или автоматически обучаться новым понятиям и навыкам, а также формировать в своей памяти модель окружающей среды. Благодаря этому робот оказывается потенциально способным выполнять такие «интеллектуальные» операции, которые у человека отождествляются с мышлением. Подобными операциями являются самообучение понятиям и распознавание образов, планирование поведения и принятие решений, самопрограммирование движений и самонастройка законов управления. Для фактического осуществления роботом интеллектуальных функций его управляющую систему необходимо оснастить соответствующим алгоритмическим в программным обеспечением, т.е. по существу элементами искусственного интеллекта.
Робот – система обучаемая и адаптивная. Необходимую информацию (знания и навыки) ему можно передавать в режиме обучения как путем непосредственного занесения ее в память управляющей системы, так и посредством воздействия через сенсорную систему (например, показом объектов из определенного класса). В ходе обучения (или самообучения) управляющая система изменяет свои параметры или структуру, т. е. адаптируется. У обученного робота эти параметры и структура зависят от взаимодействия его с внешним миром в режиме обучения (например, от того, какие объекты были ему показаны). В процессе обучения и адаптации робот формирует внутри самого себя информационную модель внешней среды.
Именно способность роботов к обучению и адаптации путем активного взаимодействия с окружающей средой отличает их от традиционных средств автоматизации (ЭВМ, промышленные автоматы с жесткой структурой, автоматические линии и т. п.). Обычные (необучаемые) автоматы и автоматические линии конструируются таким образом, чтобы в течение всего срока эксплуатации надежно выполнять только ту операцию, для автоматизации которой они предназначены. Поэтому применение необучаемых автоматов с жесткой структурой (например, станков-автоматов) целесообразно и экономически выгодно только при многократном повторении рабочей операции. Такие условия характерны для массового и крупносерийного производства.
В отличие от традиционных автоматов, роботы служат для решения не одной конкретной задачи (операции), а некоторого класса задач. В этом проявляется их универсальность. Функциональные возможности робота определяются разнообразием датчиков сенсорной системы, числом степеней свободы и конструктивными особенностями двигательной системы, автоматизмом и уровнем интеллекта управляющей системы.
Характерной чертой роботов является гибкость, т.е. способность оперативно перестраиваться с решения одной задачи (операции) на другую. Обычно это достигается путем переобучения (перепрограммирования) робота с помощью человека или в автоматическом режиме. В последнем случае гибкость достигается посредством самообучения и автоматического приспособления (адаптации) робота к заранее неизвестным или изменяющимся условиям.
В специальной литературе встречаются самые разнообразные определения понятия «робот». Так, в одной работе, робот трактуется как «универсальный автомат для выполнения механических действий», в другой – как «класс технических систем, которые в своих действиях воспроизводят двигательные и интеллектуальные функции человека», а в Большой Советской Энциклопедии – как «машина с антропоморфным (человекоподобным) поведением, которая частично или полностью выполняет функции человека (иногда животного) при взаимодействии с окружающим миром».
Для сравнения приведем еще одно определение понятия «робот». Оно было получено путем статистического анализа ответов на вопрос: «Что такое робот, чем он отличается от машин и автоматических систем?», который задавался 156 экспертам, специализирующимся в различных областях науки и техники. Исследование проводилось методом «дельфи», в основе которого лежит анализ протоколов опроса экспертов. Результатом экспертизы явилось следующее определение: «Робот представляет собой подвижную компактную систему, отличительными признаками которой являются чувствительные элементы, манипуляторы и, самое главное, некоторая степень искусственного интеллекта. При этом искусственный интеллект отождествляется главным образом со способностью к обучению и соответственно к изменению поведения».
Резюмируя вышеизложенное, понятие «робот» можно определить следующим образом. Робот – это универсальная автоматическая система для воспроизведения физических и интеллектуальных функций человека, способная обучаться на опыте и адаптироваться к реальным условиям путем активного информационного и двигательного взаимодействия с окружающей средой.
Несмотря на то, что история создания и развития современных роботов насчитывает немногим более четверти века, они претерпели значительную эволюцию, как в смысле элементной базы, так и в смысле изменения их структуры, появления новых возможностей и функций, расширения областей применения, характера использования. Поэтому сложилась традиция делить историю развития и уровень совершенства роботов на поколения. Следует оговориться, что деление это весьма условно и понимать его следует в специфическом смысле. Так, некоторые специалисты полагают более правильным слово "поколение" заменить термином "вид". Каждому поколению роботов присущи как определенные характерные показатели, так и определенные сферы применения. Каждое последующее поколение роботов обладает большими возможностями и совершенством, но не исключает предыдущего; они взаимно дополняют друг друга и находят применение соответственно своим функциональным возможностям и условиям экономической целесообразности. К настоящему времени сформировалось три поколения роботов.
Роботы первого поколения –это роботы с программным управлением (ПР – программные роботы), предназначенные для выполнения определенной, жестоко запрограммированной последовательности операций, диктуемой соответствующим технологическим процессом. Управление такими роботами осуществляется по заранее заданной программе, а значит, при строго определенных и неизменяемых условиях эксплуатации. Простота формирования и изменения программы, т.е. возможность переобучения, сделала таких роботов достаточно универсальными и гибко перестраиваемыми.
Однако функциональные возможности роботов первого поколения существенно ограничены малыми возможностями информационно-измерительной и недостаточным совершенством управляющей систем, в результате чего способность к восприятию внешнего мира и формированию его модели у программных роботов практически отсутствует. Такие роботы не могут функционировать самостоятельно: любое отклонение от заранее определенных и заданных программой условий ведет к сбою и остановке, а в наиболее тяжелых случаях - к аварии и выходу робота из строя. В последние годы в этой группе стали выделять более развитой вариант, называемый полтора поколения, оснащенный некоторым набором элементов очувствления.
Первые роботы с программным управлением появились в промышленности в начале 60-х годов ХХ века. В настоящее время серийно производятся и широко используются десятки тысяч таких роботов.
К роботам первого поколения относится подавляющее большинство современных эксплуатируемых промышленных роботов, с помощью которых осуществляется установка, снятие, транспортировка изделий, механическая и термическая обработка, простейшие сборочные операции, сварка, штамповка, прессование, ковка, литье под давлением, окраска и отделка и т.п. Они хорошо справляются с обслуживанием металлорежущего оборудования (в частности, станков с ЧПУ и обрабатывающих центров), печей, прессов, технологических линий, литейных машин и др., однако затрудняются выполнять более сложные производственные операции (например, сборочные, монтажные), не поддающиеся жесткой регламентации процесса, так как роботы первого поколения принципиально не могут функционировать автономно в недетерминированной обстановке.
Успешна работа роботов с программным управлением возможно лишь при четко определенных условиях, создание которых требует введения специального технологического оборудования, стоимость которого часто превышает стоимость самого робота. Это усложняет и удорожает роботизацию производства и иных сфер деятельности человека, делает ее менее гибкой, поэтому необходимы более совершенные роботы, обладающие значительно более развитым аппаратом очувствления, большей информационной мощностью, способностью к адаптации и самообучению, т.е. роботы второго поколения.
Роботы второго поколения –это очувствленные роботы с адаптивным управлением. Они отличаются от программных роботов, во-первых, существенно более широким набором датчиков, особенно датчиков внешней информации (телевизионные или оптические системы технического зрения, тактильные, силовые, локационные датчики и т. п.), и, во-вторых, более сложной и совершенной управляющей системой. Последняя уже не сводится к устройству для запоминания жесткой программы движения, как у роботов первого поколения, а требует для своей реализации микроЭВМ или микропроцессоров.
Технические «органы чувств», входящие в систему очувствления роботов второго поколения, служат источником обратных связей для управляющей системы. Последняя, обрабатывая сенсорную информацию, синтезирует закон управления исполнительными приводами и механизмами робота с учетом фактической обстановки.
Такой закон управления может иметь ситуационный характер. В этом случае его синтез сводится к формированию связей типа «класс ситуаций действие». Каждая подобная связь либо заранее закладывается в память управляющей системы, либо формируется в процессе обучения робота человеком. При этом под «ситуацией» понимается набор значений сигналов на выходе сенсорной системы, а под «классом ситуаций» – их множество, такое, что все «ситуации» из одного класса требуют одного и того же «действия», адекватного данному «классу ситуаций». «Действием» является программа движения, которая, как и в роботах первого поколения, задается заранее (заносится в память управляющей системы) или формируется в режиме обучения. Следует отметить, что в случае существенного изменения «ситуации», соответствующей переходу из одного «класса ситуаций» в другой, изменяется и «действие», т.е. программа движения.
Описанная схема ситуационного управления напоминает схему выработки условных рефлексов у человека или животного. Поэтому управляемое поведение очувствленного робота можно условно назвать рефлекторным. Именно наличие связей «класс ситуаций – действие» позволяет очувствленному роботу приспосабливать свое поведение к реально складывающейся и даже изменяющейся обстановке.
Другой метод адаптивного управления роботами сводится к аналитическому синтезу закона управления с обратной связью через систему очуветвления. Такое управление естественно назвать сенсорным. Его адаптационные возможности принципиально ограничены.
Более совершенным является метод управления, при котором сенсорное управление дополняется алгоритмов автоматической настройки (самонастройки) его параметров. Адаптационные возможности управления с самонастройкой практически неограниченны. Благодаря самонастройке управляющей системы робот может автоматически приспосабливаться (адаптироваться) к заранее неизвестным и изменяющимся условиям эксплуатации.
Неотъемлемой частью роботов второго поколения является их программное обеспечение, позволяющее реализовать сложные алгоритмы обработки информации и управления. По мере совершенствования очувствленных роботов и расширения, класса решаемых ими задач относительная доля затрат на алгоритмическое и программное обеспечение увеличивается. Это объясняется тем, что затраты на чисто технические компоненты очувствленных роботов в известной мере стабилизировались. В то же время их функциональные возможности определяются именно программным обеспечением и могут быть существенно расширены путем наращивания программ обработки сенсорной информации и адаптивного управления.
Возможности роботов второго поколения, оснащенных большим числом датчиков и мощной управляющей ЭВМ с развитым программным обеспечением, значительно превосходят возможности роботов первого поколения. Благодаря способности воспринимать внешнюю обстановку, анализировать сенсорную информацию и приспосабливаться к изменяющимся условиям эксплуатации очувствленные роботы могут работать с неориентированными и неупорядоченными деталями, выполнять сборочные и монтажные операции, собирать информацию о препятствиях на незнакомой местности и т.п.
Третье поколение роботов – это интеллектуальные, или разумные, роботы. Они принципиально отличаются от роботов второго поколения сложностью функций и совершенством управляющей системы, включающей в себя те или иные элементы искусственного интеллекта. Необходимо отметить, что интеллектуальные роботы предназначены не только и не столько для имитации физических действий человека, сколько для автоматизации его интеллектуальной деятельности, т.е. по существу для решения интеллектуальных задач.
Характерной особенностью интеллектуальных роботов является их способность к обучению на опыте и адаптации в процессе решения задач. Умение решать интеллектуальные задачи существенно зависит от характера процесса обучения и адаптации робота.
Существуют разные возможности придания очуветвленному роботу элементов искусственного интеллекта. Структура и функции управляющих систем интеллектуальных роботов определяются, с одной стороны, техническими возможностями синтеза и реализации нужных (с точки зрения решаемой задачи) элементов интеллекта, а с другой – содержанием и сложностью задач, которые ставит перед роботом человек.
В общем случае интеллектуальный робот способен понимать естественный язык и вести диалог с человеком, формировать модель внешней среды с той или иной степенью детализации, распознавать и анализировать «ложные ситуации, обучаться навыкам, усваивать понятия, планировать поведение, программировать движения двигательной системы и осуществлять их падежную отработку в условиях неполной информированности о характеристиках среды, робота и условий его функционирования.
Следует отметить, что реальная потребность в интеллектуальных роботах появилась лишь в последние годы. Если роботы второго поколения уже в настоящее время необходимы для ряда научно-технических разработок и их начинают применять в промышленности, то роботы третьего поколения пока не вышли из лабораторий, где их конструируют и постоянно совершенствуют.
Описанная эволюция роботов вовсе не означает, что одно поколение роботов последовательно сменяет и вытесняет другое. На самом деле, хотя и существует определенная преемственность поколений, эволюционный процесс совершенствует функциональные возможности и технические характеристики роботов. Однако при этом каждое поколение роботов представляет собой семейство роботов, предназначенных для эффективного решения своего круга задач, связанных с автоматизацией двигательных, информационных и интеллектуальных функций.
В зависимости от назначения и сферы применения роботы можно разбить на два класса – производственные и исследовательские (рис. 10.2).
Производственные роботы предназначены главным образом для выполнения тяжелой, монотонной, вредной и опасной для здоровья человека физической работы. Роботы этой группы обладают достаточно мощными и развитыми двигательными системами (автоматические манипуляторы, имитирующие движения рук человека, самоходные тележки с разными типами шасси и т.д.). «Специализация» производственных роботов позволяет выделить такие их разновидности, как промышленные, сельскохозяйственные, транспортные, строительные и бытовые роботы.
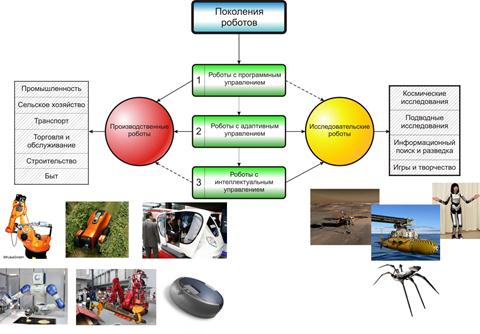
Рисунок 10.2 – Эволюционная классификация и области применения роботов
Второй класс роботов составляют исследовательские роботы. Они служат прежде всего для поиска, сбора, переработки и передачи информации об исследуемых объектах: космическом пространстве, поверхности планет, подводном мире, подземных полостях (шахтах, рудоспусках, пещерах и т. п.) и других труднодоступных для человека областях.
Таким образом, современная робототехника представляет собой гармоничное сочетание роботов разных типов и поколений, вызванных к жизни потребностями ускоренного развития научно-технического прогресса.
Классификацию управляющих систем роботов принято проводить по степени и характеру участия человека-оператора в процессе управления, по поколениям роботов, по принципу и конкретным способам управления, а также по типу элементов и устройств, на базе которых реализуется управление. До сих пор не существует единой общепринятой классификации управляющих систем. Это объясняется тем, что робототехника еще очень молода и интенсивно развивается, особенно в области совершенствования именно управляющих систем.
Предлагаемая классификация базируется на современных представлениях теории управления и направлена на возможно более полный охват различных существующих и мыслимых, управляющих систем роботов. По степени участия человеку управляющие системы подразделяются на два класса – автоматизированные и автоматические.
Автоматизированные управляющие системы характеризуются тем, что в них функции управления распределены между человеком-оператором и автоматическими устройствами. Эти системы в свою очередь подразделяются на биотехнические и интерактивные. Главным классификационным признаком в рассматриваемом случае является характер управляющий функций, возлагаемых на человека.
В биотехнических управляющих системах человек фактически берет на себя управление двигательными механизмами робота. Оно осуществляется с помощью задающего механизма (при управлении копирующим манипулятором) либо клавишного пульта управления или рукоятки. Такое ручное управление обычно используется эпизодически в режиме обучения робота, в аварийных ситуациях или при выполнении отдельных ответственных операций, которые по каким-либо причинам невозможно произвести автоматически. Если ручное управление выполняется непрерывно, то робот по существу вырождается в обычную машину (автокар, экскаватор и т.п.). К биотехническому правлению можно отнести и особый вид управления двигательными механизмами (например, протезами) – управление с помощью биоимпульсов или других сенсомоторных сигналов, поступающих от человека.
Интерактивные управляющие системы характеризуются активным общением (диалогом) и взаимодействием робота с человеком. При этом на человека возлагаются лишь некоторые интеллектуальные функции, такие, как распознавание обстановки, целеуказание, планирование движений или контроль за выполнением заданий. Важнейшими видами интерактивного управления являются супервизорное управление, когда человек берет на себя функции целеуказания (например, световым пером на экране дисплея) и визуального контроля, речевое управления когда человек дает роботу команды голосом, и диалоговое управление, когда робот не только воспринимает команды человека, но и сам информирует его (например, с помощью дисплея или синтезатора речи) о своих действиях. Можно ожидать, что по мере совершенствования интерактивных управляющих систем робот постепенно превратится в творческого партнера человека.
Отличительной чертой класса автоматических управляющих систем робота является их способность работать полностью автономно, т. е. без участия человека. Роль человека сводится лишь к формулировке задания, начальной наладке и текущему ремонту робота. По принципу управления эти системы делятся на программные, адаптивные и интеллектуальные.
Программные управляющие системы работают по жесткой программе, которая рассчитывается заранее (вне робота) и хранится в запоминающем устройстве либо автоматически формируется в режиме обучения.робота. Эти системы строятся по разомкнутой схеме (управление по упорам и позиционное управление) или с обратной связью (контурное управление, сервоуправление по программе). Необходимым условием работоспособности программных управляющих систем является неизменность условий эксплуатации робота (в пределах требуемой точности отработки программы движения).
Адаптивные управляющие системы служат для автоматического приспособления роботов к заранее неизвестным и изменяющимся условиям эксплуатации. Общей чертой всех этих систем является использование обратной связи не только в соответствии с текущим состоянием робота, но и в соответствии с состоянием внешней среды. Существует несколько разновидностей адаптивных систем, различающихся принципом действия и адаптационными возможностями.
В системах первого типа управление осуществляется по принципу «класс ситуаций – действие». При этом программа движения заранее не строится, а целенаправленное поведение робота формируется как функция состояний внешней среды и робота. Управление такого типа, использующее логическую обратную связь, будем называть ситуационным, или рефлекторным, управлением.
Системы второго типа реализуют сенсорное управление, т.е. управление с обратной связью от сенсорной системы, структура и параметры которого остаются неизменными в течение всего времени эксплуатации робота'.
В ряде случаев можно обойтись без построения программы движения. Ее роль могут играть, например, координаты и ориентация объекта манипулирования, линия стыка свариваемых деталей или подземный токопроводящий кабель, задающий маршрут перемещения транспортного робота. В таких случаях речь идет по существу об управлении по принципу самонаведения (но без адаптации). Соответствующий режим управления будем называть самонаведением робота.
В других случаях приходится автоматически, строить или оптимизировать программу движения. Такая необходимость возникает, например, в задаче о переводе робота из одного состояния в другое за кратчайшее время (задача наибольшего быстродействия) или в задачах управления, связанных с обходом внешних препятствий. Цель управления заключается в возможно более точном осуществлении заданной программы движения. Необходимым условием достижения этой цели является обеспечение устойчивости программы движения на основе соответствующего закона сенсорного управления. Такой режим управления будем называть сенсорным программным управлением.
Описанные методы и режимы управления по существу не являются адаптивными, так как не используют никаких средств самонастройки закона управления. Тем не менее робот с подобным управлением, оперативно реагируя на изменения состояний внешней среды и самого робота, которые непосредственно контролируются сенсорной системой, может вести себя адаптивно. Принципиальная ограниченность адаптационных возможностей таких роботов свидетельствует о том, что соответствующие законы управления являются адаптивными лишь условно.
Характерной чертой адаптивных управляющих систем является автоматическая настройка (самонастройка) структуры или параметров закона управления с целью обеспечения требуемого качества управления при непредсказуемых изменениях динамических характеристик робота и внешних условий его работы. Для построения таких адаптивных систем можно использовать описанные ранее законы самонаведения и сенсорного программного управления, дополненные алгоритмами самонастройки. В некоторых случаях (например, при появлении неожиданных препятствий) возникает необходимость в корректировке программы движения в ходе управления. В подобных случаях адаптивный (самонастраивающийся) закон управления дополняется средствами автоматического программирования (самопрограммирования) движений.
Интеллектуальные управляющие системы – это наиболее совершенный вид адаптивных систем. Их основу составляют уже описанные адаптивные управляющие системы, дополненные элементами искусственного интеллекта. Функции и принцип действия таких систем в какой-то мере можно сравнивать с интеллектуальной деятельностью человека.
Интеллектуальное управление имеет четко выраженную иерархическую структуру и содержит следующие основные уровни управления:
- самонастройку закона управления;
- самопрограммирование и планирование движений;
- самомоделирование и моделирование внешней среды;
- самообучение понятиям и распознавание обстановки;
- самоорганизацию целенаправленного поведения.
Каждый последующий уровень управляет работой предыдущего, расширяя функциональные возможности управляющей системы в целом и повышая качество управления. Совместная скоординированная работа «ведущих» и «ведомых» уровней управления обеспечивает комплексирование разнообразных интеллектуальных функций при автономном функционировании робота в недетерминированной обстановке.
Для сравнения эффективности программных, адаптивных и интеллектуальных управляющих систем проанализируем, как качество управления зависит от изменения условий эксплуатации робота. Необходимым условием работоспособности программных управляющих систем является неизменность условий работы. Адаптивные системы, реализующие принципы самонаведения, ситуационного и сенсорного управления, реагируют на изменения условий работы в пределах информационных возможностей сенсорной системы. Адаптивные системы с самонастройкой законов управления обеспечивают требуемое качество переходных процессов в широком (теоретически любом) диапазоне изменений неконтролируемых параметров робота и внешних условий. Наконец, интеллектуальные управляющие системы позволяют адекватно реагировать на неконтролируемые изменения внешней среды и непредсказуемый дрейф параметров самого робота вследствие самоорганизации, включающей самонастройку закона управления, самопрограммирование движений, самообучение распознаванию обстановки, а также (в случае необходимости) самодиагностику и саморемонт.
Описанная классификация управляющих систем роботов приведена на рисунке 10.3. Она относится в основном к роботам с индивидуальным управляющим устройством.

Рисунок 10.3 – Классификация управляющих систем роботов
Однако в последние годы все шире начинают применять принципы и средства группового управления роботами. Это связано, в частности, с интенсивным развитием робототехнических систем и комплексов, составляющих основу гибких заводов-автоматов.
Цель группового управления заключается в обеспечении согласованной, строго скоординированной работы нескольких роботов совместно с обслуживаемым ими технологическим оборудованием. Для достижения указанной цели используются принципы централизованного, децентрализованного и комбинированного управления.
При централизованном управлении коллектив роботов управляется от одной ЭВМ, которая выполняет обычно расчеты программ движения и координацию работы отдельных роботов и программно управляемого оборудования. Управляющие системы роботов локально отрабатывают требуемые программы движения под общим контролем центральной ЭВМ. Все возникающие неполадки автоматически анализируются и выводятся на центральный пульт, что дает возможность оперативно производить необходимые исправления.
При децентрализованном управлении каждый робот индивидуально самоуправляется, но при этом он связан информационно-управляющими каналами с другими роботами и технологическим оборудованием.
Комбинированное управление группой роботов основывается на централизованном управлении от общей ЭВМ с использованием перекрестных информационно-управляющих связей между их индивидуальными микропроцессорами. Следует отметить, что переход к групповому управлению позволяет улучшить технико-экономические показатели сложных роботизированных комплексов и придает им необходимую гибкость.
Дата публикования: 2014-11-03; Прочитано: 8525 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
