 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Мехатроника как сфера науки и техники
|
|
«МЕЖДУНАРОДНОЕ ПРАВО»
Авхадеев Владислав Рамилевич
Фардеева Ирина Николаевна
Технический редактор А. В. Чухно
Корректор З. Г. Сафаралеева
Подписано в печать
Бумага офсетная. Формат 60х84 1/16.
Печать ризографическая. Гарнитура Times New Roman.
Усл. печ. л. ___ Уч.-изд. л. ___
Тираж экз. Заказ №
Отпечатано с готового оригинал-макета
в лаборатории оперативной полиграфии
филиала Казанского (Приволжского) федерального университета
в г. Набережные Челны
423812, Республика Татарстан, г. Набережные Челны, пр. Сююмбике, 10 А (11/29)
E-mail: nauka@ksuchelny.ru
тел/факс (8552) 58-88-94, 51-87-34
Содержание
Условные обозначения, индексы и сокращения 4
Введение 5
| 1. Мехатроника как сфера науки и техники | |
| 2. Области применения и тенденции развития мехатронных систем | |
| 3. Этапы развития техники и становления мехатроники | |
| 4. Принципы и структура мехатронных устройств | |
| 5. Вопросы искусственного интеллекта | |
| 6. Вычислительные устройства и микропроцессоры | |
| 7. Информационно-измерительные системы | |
| 8. Механические элементы | |
| 9. Устройства пневмогидроавтоматики | |
| 10. Роботы и робототехнические устройства | |
| 11. Специальные робототехнические комплексы | |
| 12. Автомобильные мехатронные устройства | |
| 13. Роторные машины 14. Мехатронные подшипниковые узлы | |
| 15. Вопросы расчета и проектирования | |
| 16. Автоматизированное проектирование технических объектов | |
| 17. Моделирование мехатронных систем 18. Человек как мехатронная система | |
| Картотека тем рефератов | |
| Список вопросов | |
| Литература |
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ, ИНДЕКСЫ И СОКРАЩЕНИЯ
Z1. Условные обозначения:
x, y, z – декартовы координаты;
t – время, с;
m – масса, кг;
E – энергия, Дж;
A – работа, Дж;
N – мощность, Вт;
f – частота, Гц;
L – индуктивность;
I – сила тока, А;
U – напряжение, В;
J – момент инерции массы, кг·м2
P(t) – вероятность безотказной работы;
l(t) – интенсивность отказов;
S – коэффициент запаса прочности.
Z2. Индексы:
max, min, m, *, optim – максимальное, минимальное, осредненное, критическое и оптимальное значения соответственно;
X, Y, Z – относятся к соответствующим координатам;
мх – мехатронный.
Z3. Сокращения:
МХС – мехатронная система;
ДВС – двигатель внутреннего сгорания;
ДЛА – двигатель летательного аппарата;
ТНА – турбонасосный агрегат;
ИИ – искусственный интеллект
АЦП – аналого-цифровой преобразователь;
ИИС – измерительно-информационная система;
МП – микропроцессор;
ЦП – центральный процессор;
ПК – персональный компьютер;
КПД – коэффициент полезного действия.
Введение
Создание интеллектуальных технических устройств и систем становится доминирующим направлением науки и техники. Более того, с определенной долей уверенности можно утверждать, что на обозримое будущее интеллектуальная техника, ядром которой является мехатроника, станет базой развития всей человеческой цивилизации. Причем речь идет не только о машинах и приборах, но и о коммуникациях и строительных сооружениях. В настоящее время уже проектируются интеллектуальные дома, «умные» дороги, которые на основе нетрадиционных (известных, но мало применяемых) физических эффектов в устройствах точной механики, электронных приборов и компьютерных программ способны обеспечить сооружения электрической энергией, предоставлять информацию о параметрах среды и движения, а также управлять процессом в условиях неопределенности внешней среды.
Можно констатировать быстро растущий интерес во всем мире к мехатронике в производственной, научной и образовательной сферах. Мехатроника включена в число критических технологий РФ, ежегодно увеличивается объем производства мехатронных модулей, открыта образовательная специальность 220401 в будущих технических университетах России и институтах РАН, издаются специализированные журналы, проводятся международные научные конференции и выставки.
Мехатроника связана с интеграцией знаний из различных областей науки и техники: точной механики, микроэлектроники, компьютерного управления, искусственного интеллекта, информационных технологий. В основу мехатронного подхода положен синергетический принцип, который позволяет создать новые поколения машин, обладающих качественно более высокими свойствами и функциями.
Учебный план по специальности «Мехатроника» включает в себя ряд специальных дисциплин, таких как: графическое программирование, методы искусственного интеллекта, основы мехатроники, проектирование мехатронных модулей, микропроцессорная техника и т.д. Дисциплина «Введение в специальность» предназначена для того, чтобы дать студентам общее представление об объекте, методах применения, принципах построения мехатронных систем и стать отправной точкой для изучения базовых дисциплин мехатроники.
Мехатроника как сфера науки и техники
Термин "мехатроника" (от греческих слов "mechane" - машина и "electron" – янтарь) был введен японской фирмой Yaskawa Electric и зарегистрирован как торговая марка в 1972 году.
"МЕХАТРОНИКА" = "МЕХА ника" + "элек ТРОНИКА".
В отечественной технической литературе в 1950-х годах использовался термин "механотрон". Так назывались электронные лампы с подвижными электродами, которые применялись в качестве датчиков малых перемещений, скоростей и вибраций. В конце ХХ века термин "мехатроника" начинает использоваться в технике как название класса машин с компьютерным управлением движением.
Специальность "Мехатроника" впервые вошла в классификатор Государственного комитета по высшему образованию в 1994 году. Первыми лицензировали подготовку по этой специальности МГТУ "СТАНКИН", МГТУ им. Н.Э. Баумана и Балтийский ГТУ. В настоящее время по специальности "Мехатроника" готовят дипломированных инженеров уже в 25 вузах различных регионов России.
Дано следующее определение мехатроники как области науки и техники: в Государственном образовательном стандарте РФ по направлению "Мехатроника и робототехника", Мехатроника - это
• "... область науки и техники, основанная на синергетическом объединении узлов точной механики с электронными, электротехническими и компьютерными компонентами, обеспечивающая проектирование и производство качественно новых модулей, систем и машин с интеллектуальным управлением их функциональными движениями"
Интерпретации понятия "мехатроника", предложенных ведущими специалистами в данной области:
"...междисциплинарная инженерная область, связанная с проектированием изделий, функции которых основаны на интеграции механических и электронных компонентов, координируемых системой управления";
"... синергетическое сочетание точной механики, электронных систем управления и информационных технологий для проектирования, производства и эксплуатации интеллектуальных автоматических систем".
"... новая область науки и техники, посвященная созданию и эксплуатации машин и систем с компьютерным управлением движением, которая базируется на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов" (Кулешов В.С. Образовательный стандарт 1995 г.);
"... область науки о механических, энергетических и информационных процессах и их системном взаимодействии в машинах с компьютерным управлением, обеспечивающим получение новых свойств самой машины и качества исполнительных движений»;
"... область техники, обеспечивающая реализацию жизненного цикла мехатронных объектов, вплоть до интеллектуальных машин»;
"... область науки, которая сочетает основы механических, электронных и компьютерных инженерных наук»;
"... область науки, посвященная анализу исполнительных состояний мехатронных объектов и функционального взаимодействия механических, энергетических и информационных процессов между ними и с внешней средой, а также синтезу мехатронных объектов»;
• "... технология, которая объединяет механику с электронными и информационными технологиями для получения, как функционального
объединения, так и пространственной интеграции в компонентах, модулях, изделиях и системах»;
"...философия проектирования, которая использует синергетическую интеграцию механики, электроники и компьютерных технологий для производства качественно новых изделий, процессов и систем»;
"... метод принятия сложных решений для функционирования физических систем»;
"... идеология пространственного и временного интегрирования функций в инженерных устройствах и технологических процессах".
Следует обратить внимание на три последних определения, которые свидетельствуют о том, что концептуальная идея мехатроники сегодня уже выходит за рамки традиционных технических наук. Поэтому не случайно, что здесь используются столь общие категории, как "метод", "идеология" и даже "философия". Характерно, что в России в 1994 г. специальность "Мехатроника" была отнесена к группе междисциплинарных естественно-технических специальностей, а не к инженерной группе.
Исторически мехатроника развивается в основном на базе робототехники - научно-технического направления, в котором отечественная инженерная школа сделала серьезный задел в 70-80-х годах XX века, причем как по фундаментальным, так и по прикладным исследованиям. Однако мехатронный подход может быть реализован отнюдь не только в робототехнических системах. Учитывая, что мехатроника и робототехника объединены в настоящее время в одно направление инженерного образования, актуален вопрос взаимосвязи их предметных областей.
Обратимся к определению робототехники, которое также утверждено в Государственном образовательном стандарте РФ: "Робототехника - это область науки и техники, ориентированная на создание роботов и робототехнических систем, предназначенных для автоматизации сложных технологических процессов и операций, в том числе выполняемых в недетерминированных условиях, для замены человека при выполнении тяжелых, утомительных и опасных работ".
Таким образом, анализируя приведенные выше определения, можно сделать вывод о том, что мехатроника и робототехника различаются по классификационным признакам. Мехатроника изучает новый методологический подход к созданию модулей и машин с качественно новыми характеристиками. Роботы же представляют собой один из современных классов машин с компьютерным управлением движением.
Мехатронный подход охватывает все основные фазы жизненного цикла машины (проектирование, производство, эксплуатация и т.д.) и может быть применен в системах различного назначения, в том числе в манипуляционной технике и робототехнических системах. С другой стороны, проектирование и производство роботов базируется не только на мехатронных принципах и технологиях, но требует привлечения и других методологических подходов: методов технической кибернетики и бионики, САПР и CALS-технологий.
Мехатронные объекты основываются на синергетическом объединении узлов точной механики с электронными, электромеханическими и компьютерными компонентами, обеспечивающими проектирование и производство качественно новых систем, машин с автоматическим управлением их функциональным состоянием (рис. 1.1).
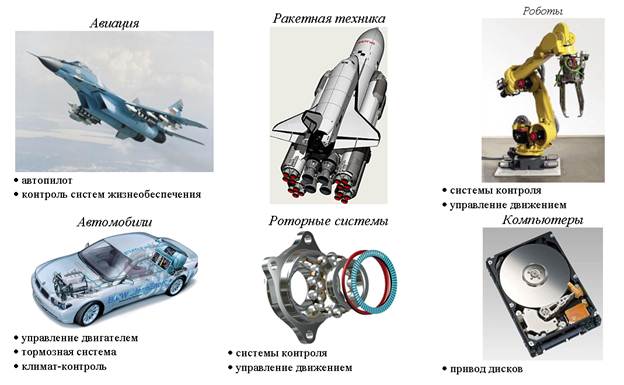
Рисунок 1.1 – Мехатронные объекты
Когда приступают к изучению какой-либо новой учебной дисциплины и, тем более, впервые знакомитесь с целым научно-техническим направлением, обязательно встают три ключевых вопроса:
ЧТО является предметом мехатроники, где научно-техническая "ниша" мехатроники и каким образом она взаимодействует с другими областями специальных знаний?
ПОЧЕМУ это направление столь быстро развивается в современном мире, каковы его цель и перспективы?
КАК происходит создание мехатронных систем или, другими словами, в чем состоит суть метода мехатроники и какие процессы лежат в основе мехатронных технологий?
Цель мехатроники как области науки и техники заключается в создании качественно новых модулей движения, а на их основе - движущихся интеллектуальных машин и систем.
Предметом мехатроники являются процессы проектирования и производства модулей, машин и систем для реализации заданных функциональных движений.
Функциональное движение мехатронной системы предусматривает ее целенаправленное механическое перемещение, которое координируется с параллельно управляемыми технологическими и информационными процессами. Таким образом, понятие "движение" трактуется в данном определении мехатроники расширительно. Древнегреческие философы понимали под движением тела его изменение вообще: от изменения размеров, цвета и температуры до возникновения и уничтожения. Но все-таки основой функциональных движений в мехатронике служит механическое перемещение системы в пространстве и во времени. Требования к показателям качества исполнения функциональных движений (по точности, скорости и т.д.) определяются служебным назначением машины.
Метод мехатроники основан на системном сочетании таких ранее обособленных естественнонаучных и инженерных направлений, как точная механика, микроэлектроника, электротехника, компьютерное управление и информатика. Основой метода мехатроники является синергетическая интеграция структурных элементов, технологий, энергетических и информационных процессов на всех этапах жизненного цикла изделия, начиная со стадии его концептуального проектирования и заканчивая производством и эксплуатацией.
Синергия (греч.) - это совместное действие, направленное на достижение общей цели. Например, на футбольном поле игроки объединяются в команду во имя общей цели - забить максимальное количество голов и победить соперника. В мехатронике все энергетические и информационные потоки направлены на достижение единой цели - выполнить программное движение с заданными показателями качества.
Важно подчеркнуть, что при синергетическом объединении достигается результат больший, чем арифметическая сумма вкладов отдельных частей системы. В спортивной команде различаются как функции спортсменов (вратарь, защитник, нападающий), так и их физические кондиции. Элементы мехатронных модулей и машин имеют различную физическую природу, что определяет междисциплинарную сущность предмета мехатроники и ее научно-техническую проблематику. При синергетической интеграции компоненты мехатронной системы должны быть слиты неразрывно и органически - именно так трактовалось это понятие в исторически первом определении мехатроники, в буквальном переводе с японского языка
Характерным примером выполнения мехатронной системой новых служебных функций является использование мобильных технологических роботов для инспекции и ремонта подземных трубопроводов.
Мобильные технологические роботы представляют собой сложные мехатронные системы. Проектно-конструкторские решения по разработке электромеханической, сенсорной и электрической частей этих машин необходимо принимать только во взаимосвязи, учитывая уже с начальных этапов лимитирующий фактор - диаметр трубы, а также неблагоприятные условия эксплуатации в подземных трубопроводах.
Особенное значение имеют мехатронные системы, функционирующие в условиях, несовместимых с жизнью человека либо опасных для его здоровья. К их числу следует отнести робототехнические комплексы, предназначенные для работы в средах радиоактивного загрязнения. Необходимость выполнения роботами операций в таких средах возникает при проведении аварийно-восстановительных работ на АЭС, перевозках отработанного топлива, возникновением нештатных и аварийных ситуаций.
В настоящее время для комплексного решения вышеперечисленных проблем используется подход, называемый «Интеллектуальное здание» (не очень точный перевод английского термина "intelligent building"). Под интеллектом в этом подходе понимается умение распознавать определенные ситуации и каким-либо образом на них реагировать (естественно, степень этого умения может быть различной, в том числе очень высокой). Вместе с тем, в соответствии с буквальным переводом с английского, интеллектуальное здание можно интерпретировать как "разумно построенное". Это означает, что здание должно быть спроектировано так, что все сервисы могли бы интегрироваться друг с другом с минимальными затратами (с точки зрения финансов, времени и трудоемкости), а их обслуживание было бы организовано оптимальным образом (рис. 1.2).
Концепция интеллектуального здания содержит в себе следующие положения: создание интегрированной системы управления зданием - системы с возможностью обеспечения комплексной работы всех инженерных систем здания: освещения, отопления, вентиляции, кондиционирования, водоснабжения, контроля доступа и многих других; устранение всего обслуживающего персонала здания и передача функций контроля и принятия решений подсистемам интегрированной системы управления зданием.
В эти подсистемы как раз и закладывается «интеллект» здания – то, как оно будет реагировать на изменение параметров датчиков системы и другие события типа внештатных ситуаций; реализация механизма немедленного отключения и передачи при необходимости управления человеку любой подсистемой интеллектуального здания. Вместе с этим человеку должен предоставляться удобный и единообразный доступ к управлению и отображению всех подсистем и частей «Интеллектуального здания»; обеспечение корректной работы отдельных подсистем, в случае отказа общей управляющей системы или других частей системы; минимизация стоимости обслуживания и модернизации систем здания, что должно обеспечиваться применением общих стандартов в построении подсистем, автоматическое конфигурирование и обнаружение новых устройств и модулей при их добавлении в систему; наличие в здании проложенной коммуникационной среды для подключения к ней устройств и модулей систем. Наряду с этим возможность использования в качестве коммуникационной среды в системе управления различных типов физических каналов: слаботочные линии, силовые линии, радиоканал.

Рисунок 1.2 – Структура интеллектуального дома
Интеллектуальное здание имеет массу преимуществ перед неинтеллектуальным. Интегрированная система управления зданием позволяется владельцам здания создавать сколь угодно сложные и интеллектуальные процедуры функционирования этого здания, так как все исполнительные системы этого здания могут работать согласованно и совместно.
Дата публикования: 2014-11-03; Прочитано: 3467 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
