 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Q Принцип дії асинхронної машини
|
|
q Магнітне поле, що обертається
q Режими роботи асинхронної машини
q Конструкція ротора
q Механічні характеристики асинхронного двигуна.
q Баланс активних потужностей асинхронного двигуна.
q Асинхронний лінійний двигун (ЛАД).
q Однофазний асинхронний двигун.
Електричні машини
Генератори, що перетворюють механічну енергію в електричну і двигуни, що перетворюють електричну енергію в механічну мають загальну назву – електричні машини. На відміну від машин, що обертаються, трансформатори уявляють собою статичні електромагнітні пристрої. Головною характерною рисою, загальною для електричних машин і трансформаторів, є те, що вони відносяться до енергоутворюючих пристроїв, що працюють на принципі електромагнітної взаємодії.
Асинхронні машини
З числа різних видів електричних машин (двигунів, генераторів) найрозповсюдженішими є асинхронні безколекторні машини, які найчастіше використовуються як двигуни.
Асинхронна машина – це машина, при роботі якої збуджується обертове магнітне поле (магнітне поле, що обертається) і змушує обертатись ротор. Ротор обертається асинхронно відносно поля, тобто з кутовою швидкістю, відмінною від кутової швидкості поля.
Асинхронна машина винайдена в 1888 р. російським вченим Доліво–Добровольським, але і до нашого часу зберегла всі конструктивні особливості, закладені винахідником.
Асинхронна машина проста і дешева. Загальний недолік – відносна складність і неекономічність регулювання їх експлуатаційних характеристик.
Принцип дії асинхронної машини
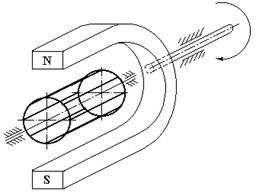 Двополюсний підковоподібний магніт обертається з постійною швидкістю. Між полюсами магніту розташований барабан – ротор, виконаний з струмоводних стрижнів у вигляді “білячого колеса”. Магнітні лінії поля при обертанні магніту перетинаючи стрижні ротора, індукують в них ЕРС, що обумовлює появу в стрижнях струмів. В результаті взаємодії струмів в стрижнях з магнітним полем виникає сила, що утворює електромагнітний обертаючий момент. Під дією цього моменту ротор починає обертатись в напрямку обертання магнітного поля. Із збільшенням швидкості обертання ротору і, відповідно, зменшенням відносної швидкості руху стрижнів в магнітному полі індуковані в них ЕРС поступово зменшуються, в зв’язку з цим зменшуються струми в стрижнях ротору і відповідно зменшується обертаючий момент. При певній швидкості обертання ротора (меншій за швидкість обертання магнітного поля) настає рівновага між магнітним обертаючим моментом і моментом опору (тертя) і далі швидкість обертання ротору при рівновазі моментів залишається постійною.
Двополюсний підковоподібний магніт обертається з постійною швидкістю. Між полюсами магніту розташований барабан – ротор, виконаний з струмоводних стрижнів у вигляді “білячого колеса”. Магнітні лінії поля при обертанні магніту перетинаючи стрижні ротора, індукують в них ЕРС, що обумовлює появу в стрижнях струмів. В результаті взаємодії струмів в стрижнях з магнітним полем виникає сила, що утворює електромагнітний обертаючий момент. Під дією цього моменту ротор починає обертатись в напрямку обертання магнітного поля. Із збільшенням швидкості обертання ротору і, відповідно, зменшенням відносної швидкості руху стрижнів в магнітному полі індуковані в них ЕРС поступово зменшуються, в зв’язку з цим зменшуються струми в стрижнях ротору і відповідно зменшується обертаючий момент. При певній швидкості обертання ротора (меншій за швидкість обертання магнітного поля) настає рівновага між магнітним обертаючим моментом і моментом опору (тертя) і далі швидкість обертання ротору при рівновазі моментів залишається постійною.
Якщо до ротора прикласти зовнішній момент опору (навантаження) то рівновага порушиться – момент опору буде більший за обертаючий момент. В результаті швидкість обертання ротора почне зменшуватись, швидкість перетинання магнітними лініями стрижнів збільшуватись, індуковані в стрижнях ЕРС і, відповідно, струми збільшуватись, збільшується обертаючий момент і, кінець–кінцем при деякій новій швидкості обертання ротора знову досягнеться рівновага моментів.
З цього програшу подій – висновок: кожному значенню моменту опору відповідає певна швидкість обертання ротора.
Швидкість обертання ротора і магнітного поля неоднакові. Ступінь відставання швидкості обертання ротору n від швидкості обертання магнітного поля n 0 оцінюється величиною ковзання
 звідки
звідки 
При зміні швидкості обертання ротора n = 0 ¸ n 0 ковзання змінюється S = 1¸0.
Розглянута модель механізму – не є двигуном.
В асинхронному двигуні магнітне поле, що обертається утворюється електричним шляхом нерухомими обмотками, що живляться трифазним струмом.
Магнітне поле, що обертається
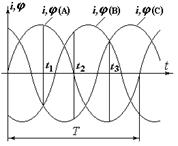 |
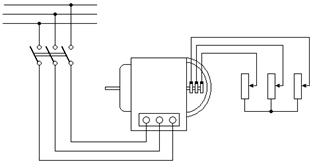
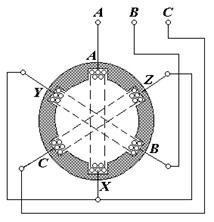 Статор асинхронної машини уявляє собою циліндр, зібраний з листової сталі з пазами на внутрішній поверхні. В діаметрально протилежних пазах A–X, B–Y¸ C–Z розташовані витки котушок з однаковим числом витків. Кут між площинами котушок складає 120°. Початки котушок A, B, C приєднані до мережі трифазного струму частотою f 1, а кінці X, Y, Z об’єднані в загальну нульову точку. В обмотках котушок протікають синусоїдальні струми І А, І В, І С, взаємно зсунуті по фазі на третину періоду. Кожна котушка окремо створює пульсуючий магнітний потік, вісь якого співпадає з віссю відповідної котушки.
Статор асинхронної машини уявляє собою циліндр, зібраний з листової сталі з пазами на внутрішній поверхні. В діаметрально протилежних пазах A–X, B–Y¸ C–Z розташовані витки котушок з однаковим числом витків. Кут між площинами котушок складає 120°. Початки котушок A, B, C приєднані до мережі трифазного струму частотою f 1, а кінці X, Y, Z об’єднані в загальну нульову точку. В обмотках котушок протікають синусоїдальні струми І А, І В, І С, взаємно зсунуті по фазі на третину періоду. Кожна котушка окремо створює пульсуючий магнітний потік, вісь якого співпадає з віссю відповідної котушки.
Можна показати, що три пульсуючі потоки утворюють спільне магнітне поле, незмінне 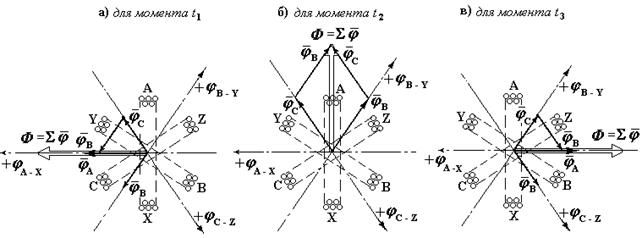
за величиною і, що обертається з постійною швидкістю відносно нерухомих катушок.
Так на малюнках (а), (б), (в) показані утворення сумарних магнітних потоків Ф = S j =` j A + ` j B + ` j C для трьох послідовних моментів часу t 1, t 2, t 3. Величини векторів j A, j B, j C взяті з графіку зміни магнітних індукцій в часі. Оскільки магнітний потік Ф пропорційний струму, що його утворює (за законом Ома для магнітних кіл Ф = Iw / R м), то графіки зміни магнітних потоків збігаються у відповідному масштабі з графіками зміни струмів в фазних обмотках A–X, B–Y, C–Z.
Сумарне магнітне поле обертається в площині осей катушок з кутовою швидкістю w, тобто повний оберт вектор магнітної індукції здійснить за один період зміни струму в катушці. Воно послідовно співпадає за напрямком з віссю тієї з фазних обмоток, струм в якій досягає максимального значення. Тобто магнітне поле обертається в напрямку послідовності фаз трифазної системи струмів в фазних обмотках.
Наслідок: щоб змінити напрямок обертання магнітного поля достатньо змінити порядок підключення двох (із трьох) фазних обмоток.
Отже трифазна симетрична система струмів збуджує магнітне поле з однією парою полюсів, тобто двополюсне магнітне поле, що обертається. Його вісь повертається на 360°, тобто здійснює один оберт за час одного періоду зміни струму. Звідки, частота обертання n 0 двополюсного поля дорівнює за величиною частоті f 1 струмів в обмотці статора.
За історичною традицією частоту обертання прийнято визначати числом обертів n 0 за хвилину n 0 = 60× n 0 = 60× f 1.
Враховуючи, що n 0 = f 1, кутова швидкість обертання двополюсного поля W0 = 2p n 0 = 2p f 1 = w [радіан / сек.].
Отже, кутова швидкість обертання двополюсного магнітного поля за величиною дорівнює кутовій частоті струмів в обмотках статора.
В багатополюсній обмотці статора кожній парі полюсів поля, що обертається, відповідає трійка котушок для фазних обмоток. Звідки, якщо поле повинно мати р пар полюсів, то кожна з фазних обмоток статора повинна бути розділена на р частин. При цьому частота обертання магнітного поля складає n 1 = 60× f / р.
Режими роботи асинхронної машини
Режим роботи трифазної асинхронної машини визначається режимом електро–магнітної взаємодії струмів в обмотках статора і ротора. В залежності від значення ковзання трифазна асинхронна машина може працювати в одному з трьох режимів двигуна, генератора і електромагнітного гальма.


В режимі двигуна (0 < S < 1) трифазна асинхронна машина є перетворювачем електричної енергії в механічну. Ротор двигуна повинен обертатись асинхронно повільніше поля, з такою частотою обертання, при якій струми в обмотці ротора утворюють обертаючий момент, що врівноважує гальмуючий момент від тертя і навантаження на валу.
В режимі генератора S < 0 – швидкість обертання ротора більша за швидкість обертання поля.
В режимі електромагнітного гальма напрямки обертання ротора і магнітного поля протилежні.
Конструкція ротора
Асинхронні машини в основному відрізняються будовою ротора.
В більшості двигунів використовується короткозамкнутий ротор. Цей ротор дешевший і, що суттєво, обслуговування двигуна з таким ротором простіше. Конструкція – “біляче колесо” – була вже розглянута.
 Обмотки фазного ротора або ротора з контактними кільцями виконуються з ізольованого проводу. В більшості випадків обмотка трифазна з тим же числом котушок, що і обмотка статора. Три фазні обмотки ротора з’єднані на самому роторі «зіркою», а вільні їх кінці приєднані до трьох контактних кілець, укріплених на валу і електрично ізольованих від нього. Через кільця і струмоз’ємні щітки обмотки ротора замикаються на трифазний реостат.
Обмотки фазного ротора або ротора з контактними кільцями виконуються з ізольованого проводу. В більшості випадків обмотка трифазна з тим же числом котушок, що і обмотка статора. Три фазні обмотки ротора з’єднані на самому роторі «зіркою», а вільні їх кінці приєднані до трьох контактних кілець, укріплених на валу і електрично ізольованих від нього. Через кільця і струмоз’ємні щітки обмотки ротора замикаються на трифазний реостат.
Обмотка статора включається безпосередньо в трифазну мережу. Включення реостату в коло ротора дає можливість суттєво покращити пускові умови для двигуна – зменшити пусковий струм і збільшити початковий (пусковий) обертаючий момент. Крім того, за допомогою реостату, включеного в коло ротора, можна плавно регулювати швидкість двигуна.
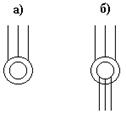 Умовні позначення асинхронних машин з короткозамкнутим (а) і фазним (б) роторами на принципових та електричних схемах.
Умовні позначення асинхронних машин з короткозамкнутим (а) і фазним (б) роторами на принципових та електричних схемах.
Механічні характеристики асинхронного двигуна.
 З принципу роботи двигуна стає очевидно, обертаючий момент двигуна М при незмінній швидкості обертання магнітного поля цілком залежить тільки від ковзання S, або від швидкості обертання ротора n,оскільки
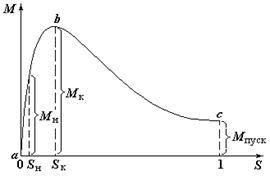
З принципу роботи двигуна стає очевидно, обертаючий момент двигуна М при незмінній швидкості обертання магнітного поля цілком залежить тільки від ковзання S, або від швидкості обертання ротора n,оскільки  . Задаючи різні значення S в межах 0 ¸ 1 можна побудувати графік залежності обертаючого моменту М від S або М від n. Залежність М (S) і М (n) мають назву механічні характеристики асинхронного двигуна.
. Задаючи різні значення S в межах 0 ¸ 1 можна побудувати графік залежності обертаючого моменту М від S або М від n. Залежність М (S) і М (n) мають назву механічні характеристики асинхронного двигуна.
На характеристиці можна відмітити:
· максимальний або критичний момент М к;
· пусковий момент М пуск (при пуску двигуна, тобто при S = 1 або n = 0);
· номінальний момент М н, що відповідає номінальному режиму роботи двигуна (йому відповідає номінальна частота обертання ротора n ном, що вказується в паспорті двигуна).
Щоб двигун почав обертатись під навантаженням, необхідно, щоб його пусковий момент був більшим за гальмуючий пусковий момент механізму, на який працює двигун. Двигун розганяється у відповідності з механічною характеристикою: розгін починається з точки с, потім проходиться точка б і двигун опиняється в сталому режимі, тобто обертається з частотою n на ділянці а – б в точці, що відповідає умові М = М г (де М г – гальмуючий момент). Отже, ділянка б – с відповідає розгону, а ділянка а – б – робочому режиму, на якій при зміні обертаючого моменту М від 0 до М к частота обертання двигуна змінюється мало.
Стійка робота двигуна, тобто робота при n» const, можлива тільки на ділянці а – б. Як це було показано раніше, – як би не змінювався гальмуючий момент, в межах ділянки а – б двигун може так змінити обертаючий момент, що умова його стійкої роботи завжди зберігається. В цьому полягає властивість внутрішнього саморегулювання асинхронного двигуна.
Коли гальмуючий момент стає рівним максимальному (критичному), обертаючий момент почне зменшуватись і рівність М = М г стає неможливою.
 По значенню відношення М к / М ном = g можнасудитипро перевантажувальну здатність двигуна. В асинхронних двигунах g = 1,7 ¸ 2,5.
По значенню відношення М к / М ном = g можнасудитипро перевантажувальну здатність двигуна. В асинхронних двигунах g = 1,7 ¸ 2,5.
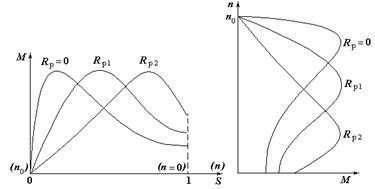
Двигуну з фазним ротором відповідає родина механічних характеристик.
Звичайно робота двигуна відповідає залежності з R p = 0. Ця характеристика аналогічна характеристиці двигуна з короткозамкнутим ротором і має назву природня.
Якщо трифазний реостат в колі ротора вивести на максимальний опір, то можна збільшити пусковий момент, а потім, зменшуючи опір реостату до нуля, вивести двигун в найбільш сприятливий режим.
Механічні характеристики, що отримані при введені реостату в коло фазного ротора, називається реостатними.
Обертаючий момент і ковзання, що відповідають роботі двигуна при повному навантаженні, називаються номінальним моментом М н і номінальним ковзанням S н.
Баланс активних потужностей асинхронного двигуна.
Дата публикования: 2014-11-04; Прочитано: 2308 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
