 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Основы теории зацепления
|
|
Боковые грани зубьев, соприкасающиеся друг с другом во время вращения колес, имеют специальную криволинейную форму, называемую профилем зуба. Наиболее распространенным в машиностроении является эвольвентный профиль
 Придание профилям зубьев зубчатых зацеплений таких очертаний не является случайностью. Чтобы зубья двух колес, находящихся в зацеплении, могли плавно перекатываться один по другому, необходимо было выбрать такой профиль для зубьев, при котором не происходило бы перекосов и защемления головки одного зуба во впадине другого. Если проследить за движением пары зубьев двух колес с момента, когда они впервые коснутся друг друга до момента, когда они выйдут из зацепления, то окажется, что все точки касания их в процессе движения будут лежать на одной прямой. Линия зацепления представляет собой линию давления сопряженных профилей зубьев в процессе эксплуатации зубчатой передачи. Стремление сделать зубчатую передачу более компактной вызывает необходимость применять зубчатые колеса с возможно меньшим числом зубьев. Изменение количества зубьев зубчатого колеса влияет на их форму. При увеличении числа зубьев до бесконечности колесо превращается в рейку и зуб приобретает прямолинейное очертание. С уменьшением числа зубьев одновременно уменьшается толщина зуба у основания и вершины, а также увеличивается кривизна эвольвентного профиля, что приводит к уменьшению прочности зуба на изгиб. При уменьшении числа зубьев, когда z < zmim, происходит так называемое подрезание зубьев, то есть явление, когда зубья большого колеса при вращении заходят в область ножки меньшего колеса, тем самым ослабляя зуб в самом опасном сечении, увеличивая износ зубьев и снижая КПД передачи.
Придание профилям зубьев зубчатых зацеплений таких очертаний не является случайностью. Чтобы зубья двух колес, находящихся в зацеплении, могли плавно перекатываться один по другому, необходимо было выбрать такой профиль для зубьев, при котором не происходило бы перекосов и защемления головки одного зуба во впадине другого. Если проследить за движением пары зубьев двух колес с момента, когда они впервые коснутся друг друга до момента, когда они выйдут из зацепления, то окажется, что все точки касания их в процессе движения будут лежать на одной прямой. Линия зацепления представляет собой линию давления сопряженных профилей зубьев в процессе эксплуатации зубчатой передачи. Стремление сделать зубчатую передачу более компактной вызывает необходимость применять зубчатые колеса с возможно меньшим числом зубьев. Изменение количества зубьев зубчатого колеса влияет на их форму. При увеличении числа зубьев до бесконечности колесо превращается в рейку и зуб приобретает прямолинейное очертание. С уменьшением числа зубьев одновременно уменьшается толщина зуба у основания и вершины, а также увеличивается кривизна эвольвентного профиля, что приводит к уменьшению прочности зуба на изгиб. При уменьшении числа зубьев, когда z < zmim, происходит так называемое подрезание зубьев, то есть явление, когда зубья большого колеса при вращении заходят в область ножки меньшего колеса, тем самым ослабляя зуб в самом опасном сечении, увеличивая износ зубьев и снижая КПД передачи.
Билет 12

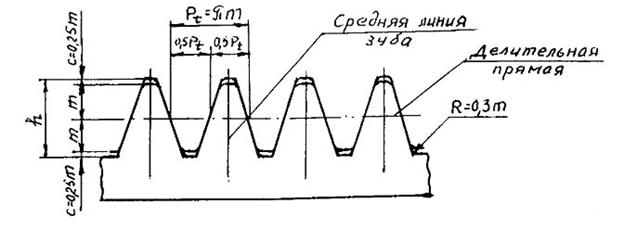
Следует отметить, что в червячной передаче без смещения начальная прямая рейки в осевом сечении червяка совпадает сделительной прямой, а начальная окружность колеса - с делительной окружностью. Угол зацепления равен углу профиля витка червяка в осевом сечении аю а. В червячной передаче со смещением начальная прямая не совпадает с делительной прямой рейки и касается делительной окружности колеса, являющейся, как и в передаче без смещения, начальной окружностью.

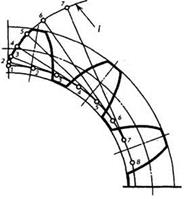
С целью уменьшения нагрузки на одну пару зубьев, что позволяет увеличить передаваемую мощность, число сателлитов или сателлитных блоков k планетарных механизмов принимают больше единицы. При этом, чтобы разгрузить подшипники оси водила от действия центробежных сил инерции сателлитов, k принимают кратным двум или трем, так как в этом случае при равномерном расположении сателлитов по окружности их силы инерции взаимно уравновешиваются.
Условие соседства планетарных механизмов заключается в том, чтобы при их работе головки сателлитов не задевали друг друга.
При этом должно выполняться неравенство (см. рис. 2.1)
 , (2.2)
, (2.2)
где  - расстояние между осями соседних сателлитов;
- расстояние между осями соседних сателлитов;
 - радиус окружности выступов сателлитов.
- радиус окружности выступов сателлитов.
Если все колёса механизма – нулевые, и сателлиты или сателлитные блоки расположены равномерно по окружности, для всех рассматриваемых типов механизмов условие соседства имеет вид
 , (2.3)
, (2.3)
где z – число зубьев сателлита или большего колеса сателлитного блока.
А) Б)


Окружности радиусов  и
и  , проходящие через полюс, называются начальными; окружная скорость точек, лежащих на этих окружностях, одинакова и равна
, проходящие через полюс, называются начальными; окружная скорость точек, лежащих на этих окружностях, одинакова и равна
 .
.
Это значит, что при вращении зацеплённых зубчатых колёс начальные окружности перекатываются одна по другой без скольжения. У пары колёс может быть сколько угодно начальных окружностей.
При зацеплении точка К контакта одного зуба будет скользить по поверхности второго со скоростью
 ,
,
которая называется скоростью скольжения контактных точек. Скорость скольжения прямо пропорциональна расстоянию контактных точек от полюса.
Билет 13

Шарнирный четырёхзвенник
плоский механизм, составленный из четырёх звеньев,образующих вращательные кинематические пары (См. Кинематическая пара) (шарниры). Ш. ч. (рис.)состоит из неподвижного звена 0 (стойки), двух вращающихся звеньев 1 и 3 и соединит. звена 2, которое наз.также Шатуном. Вращающееся звено называется кривошипом, если оно может совершать полный оборототносительно оси вращения, и коромыслом, если оно может совершать только часть оборота. По видувращающихся звеньев Ш. ч. подразделяются на кривошипно-коромысловые, двухкривошипные идвухкоромысловые. Кривошипно-коромысловый Ш. ч. применяется для преобразования непрерывноговращения кривошипа в возвратно-вращательное движение коромысла. В технологических машинахкривошип получает движение от главного вала, а с коромыслом связан рабочий орган, выполняющийзаданную технологическую операцию. Двухкривошипный Ш. ч. служит для преобразования равномерноговращения в неравномерное вращение одного направления и применяется в тех машинах, где рабочий органдолжен при движении в одном направлении иметь на некотором участке скорость, значительнопревышающую среднюю скорость. Двухкоромысловый Ш. ч. применяется преимущественно в приборах ислужит для механического воспроизведения заданной функции (например, y= lg x). Ш. ч. используется такжедля воспроизведения движения точки по заданной кривой, в частности по отрезку прямой линии (например,Чебышева параллелограмм).


Одной из кинематических характеристик стержневого механизма может служить коэффициент изменения скорости хода  представляющий собой отношение средней скорости холостого хода
представляющий собой отношение средней скорости холостого хода  к средней скорости рабочего хода
к средней скорости рабочего хода  .
.
рис. 40
При равномерном движении кривошипа коэффициент равен:
 ,
,
где S – ход ползуна;  - время рабочего и холостого хода;
- время рабочего и холостого хода;  - угловая скорость кривошипа;
- угловая скорость кривошипа;  - угол размаха кулисы.
- угол размаха кулисы.
При заданном можно определить или наоборот. Используя дополнительные конструктивные соображения, можно определить размеры всех звеньев механизма.
Вид синтеза – кинематический; способ – графо-аналитический.
Билет 14

А) Б)

Эвольвентой окружности является траектория любой точки прямой линии, перекатываемой по окружности без скольжения. По эвольвенте обрабатывают профиль зубьев зубчатых колёс. Эвольвенту окружности можно получить, сматывая натянутую нить с цилиндрической поверхности. Конец этой нити будет описывать эвольвенту.
Параметрические уравнения эвольвенты окружности:


где  — радиус окружности;
— радиус окружности;  — угол поворота радиуса окружности.
— угол поворота радиуса окружности.
Дата публикования: 2015-11-01; Прочитано: 1034 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
