 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Функции вызова графического интерфейса
|
|
К рассматриваемой группе относятся функции ltiview и rltool.
С помощью функции ltiview открывается интерактивный обозреватель, известный из Simulinka. Функция rltool открывает графический интерфейс, позволяющий проектировать корректирующее звено в замкнутой одномерной системе управления методом корневого годографа. Функция записывается в следующих формах:
Rltool
rltool(sys)
rltool(sys.comp)
rltool(sys.соmр.LocationFlag, FeedbackSign)
Здесь:
• sys – имя модели одномерного объекта;
• сomp – имя (идентификатор) корректирующего звена-компенсатора;
• LocationFlag – переменная, задающая позицию компенсатора в системе: 1 – в прямом тракте системы, 2 – в цепи обратной связи;
• FeedbackSign – тип обратной связи (-1 – отрицательная обратная связь, 1 – положительная обратная связь).
Выполнение рассматриваемой функции без аргументов приводит к появлению основного окна интерфейса (рис. 2).
Работу с интерфейсом рассмотрим на примере. Из командного окна MATLAB выполним загрузку в рабочую область файла с набором LTI-моделей. Для этого в окне Рабочая область MATLAB необходимо загрузить файл данных ltiexamples,который находится в папке toolbox (toolbox\control\control\ltiexamples.mat).
Затем в меню открывшегося ранее окна (рис. 2) интерфейса выберем команду File > Import (Файл > Импорт). Выполнение данной команды меню приведет к открытию диалогового окна загрузки моделей и задания структуры системы (рис. 3).
В верхнем правом углу окна приведена структурная схема замкнутой системы. В ней F, G, Н, C – звенья, модели которых можно загружать (с помощью переключателя Import From) из рабочей среды MATLAB, из mat-файла или из среды Simulink. Звено, обозначенное буквой C, – это компенсирующее динамическое звено, структуру и параметры которого нужно определить. В исходной схеме данное звено включено в прямой тракт замкнутой системы. Нажатием кнопки Other (Другая) можно перейти к альтернативной структуре, в которой компенсатор введен в цепь обратной связи.

|
| Рис. 2. Окно, открывающееся при использовании функции rltool |
Сохранив исходную структуру, выберем модели для загрузки. В качестве модели звена G примем модель с именем G. Данный выбор проведем, выбрав в списке модель G и нажав кнопку со стрелкой, указывающей на звено G (в правой нижней части окна). Модели звеньев F и Н изменять не будем (по умолчанию это пропорциональные звенья с единичным коэффициентом усиления). Зададим теперь какое-либо имя создаваемой системе, например SAUsys (в поле Name), подтвердим указанные действия нажатием кнопки ОК. Окно загрузки модели при этом закроется, и в основном окне интерфейса отобразится распределение нулей (кружочки) и полюсов (квадратики) замкнутой системы при изменении коэффициента усиления компенсатора C от указанного (заданного) значения до  (рис. 4).
(рис. 4).
Система с таким расположением полюсов не обладает хорошим качеством переходного процесса, поскольку они расположены слишком близко к границе устойчивости (к мнимой оси комплексной плоскости). В этом легко убедиться, просмотрев график переходного процесса замкнутой системы. Для этого нужно в окне интерфейса метода выбрать в меню Analysis команду Other Loop Responses, чтоприведет к открытию окна интерактивного обозревателя (рис. 5).

| 
| ||
| Рис. 3. Окно загрузки модели и задания структуры системы | Рис. 4. Нули и полюса замкнутой системы | ||

| Как видно из графика переходного процесса, исходная система близка к границе устойчивости. Время затухания переходного процесса составляет около 3,5.104 с. Если ввести корректирующее звено пропорционального типа, то существенно улучшить динамические свойства системы не удается (при заданной структуре компенсатора нули и полюсы можно передвигать непосредственно на графике при помощи мыши; при этом соответственно изменяется значение | ||
| Рис. 5. Переходный процесс в нескорректированной системе | |||
коэффициента усиления компенсатора в поле С). Поэтому применим компенсатор инерционно-форсирующего типа, добавив один полюс и один нуль с помощью кнопок с обозначением крестика и кружочка, расположенных над графическим окном слева, и разместив при этом (с помощью мыши) нули и полюсы, например, так, как это показано на рис. 6.
График переходного процесса (рис. 7) при такой коррекции существенно улучшается. Если такой вид переходного процесса нас устраивает, на этом процедуру синтеза можно и закончить. Заметим, что передаточная функция компенсатора в данном случае имеет вид  .
.
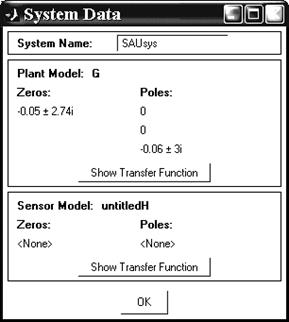
Интерфейс метода корневых годографов обладает многочисленными сервисными функциями. Если, например, дважды щелкнуть на блоке G структурной схемы, то откроется окно с информацией о моделях F, H, G (рис. 8).

| |
| Рис. 6. Расположение нулей и полюсов после введения инерционно-форсирующего звена | |

| |
| Рис. 7. Переходный процесс в скорректированной системе | |
| 
|
| Рис. 8. Информационное окно о параметрах моделей блоков G, H | Рис. 9. Структурная схема исследуемой системы в среде Simulink |
Довольно много возможностей предоставляет пользователю меню интерфейса. Например, используя команду меню Утилиты / Рисовать Simulink диаграмму, непосредственно перейдем к моделированию функционирования системы в среде Simulink ( рис. 9).
Дата публикования: 2015-09-18; Прочитано: 283 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
