 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Классификация плоских механизмов по Л. В. Ассуру
|
|
Замечено, что к любому плоскому механизму можно присоединить такую кинематическую цепь, что степень его подвижности не изменится. Если эта цепь является кратчайшей (т.е. не распадается на более короткие и обладающие тем же свойством), и если при ее формировании использованы только низшие пары пятого класса, то такую цепь называют структурной группой или группой Ассура (в дальнейшем – просто группой). При наличии в механизме высших пар от них всегда можно избавиться с помощью описанной выше процедуры замены.
Из сказанного следует, что группа, присоединенная к стойке, имеет нулевую подвижность, но тогда она является и кинематически и статически определимой системой.
Пусть группа состоит из n звеньев; для соединения этих звеньев между собой и для присоединения группы к стойке или к подвижным звеньям механизма использовано  пар пятого класса; тогда для группы, согласно (1.1), можно записать
пар пятого класса; тогда для группы, согласно (1.1), можно записать
 , (1.2)
, (1.2)
или
 . (1.3)
. (1.3)
Из (1.3) заключаем, что группа может состоять только из четного числа звеньев, число пар пятого класса в группе всегда в полтора раза больше числа звеньев. Те пары, с помощью которых группа присоединяется к механизму, называют внешними, их количество определяет порядок группы; остальные пары, посредством которых звенья группы соединяются между собой, называют внутренними.
После отсоединения от механизма всех структурных групп останется стойка и начальные звенья в количестве W (речь идет о фактической степени подвижности механизма, рассчитанной после исключения пассивных связей и местных подвижностей). Каждое начальное звено со стойкой называют начальным механизмом; таким образом, механизм состоит из W начальных механизмов и некоторого количества структурных групп, присоединенных в строго определенном порядке, который отражают в специальной записи, называемой формулой строения. Например, механизм с двумя степенями свободы, содержащий шесть структурных групп, может иметь такое строение

| (1.4) |
В зависимости от количества звеньев в группе и способа их соединения между собой группы делят на классы.
Все двузвенные группы ( ) являются группами II класса второго порядка; дополнительно эти группы, в зависимости от количества поступательных пар, использованных при их формировании, делятся на виды (рис. 1.10).
) являются группами II класса второго порядка; дополнительно эти группы, в зависимости от количества поступательных пар, использованных при их формировании, делятся на виды (рис. 1.10).

| 
| 
| 
| 
|
| 1 вид | 2 вид | 3 вид | 4 вид | 5 вид |
| Рис. 1.10 Группы II класса |
Класс групп, состоящих более чем из двух
1. В основе любого механизма лежит один или несколько начальных механизмов. Начальный механизм – это начальное звено со стойкой.звеньев, определяется числом вершин (или сторон) многоугольника, образуемого внутренними кинематическими парами на структурной схеме группы, которая строится по следующим правилам:
· все вращательные и поступательные пары пятого класса изображают на этой схеме как вращательные;
· звенья, участвующие в нескольких кинематических парах, изображаются в виде соответствующих многоугольников.
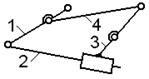
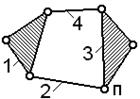
На рис. 1.11 и 1.12 для удобства сопоставления помещены рядом друг с другом кинематические и структурные схемы двух групп различных классов.

| 
| 
| 
|
| а) Кинематическая схема | б) Структурная схема | а) Кинематическая схема | б) Структурная Схема |
| Рис. 1.11 Группа III класса 3 порядка | Рис. 1.112 Группа IV класса 2 порядка |
На структурной схеме для большей наглядности можно те шарниры, которым на кинематической схеме соответствуют поступательные пары, помечать буквой «п».
В структурных схемах групп III класса внутренние шарниры образуют один или несколько треугольников жесткой (неизменяемой) конфигурации; в схемах групп более высоких классов встречаются многоугольники (изменяемой конфигурации) с четырьмя и большим числом сторон, которое и определяет класс группы.
Отметим, что классификации Л. В. Ассура подчиняются только те плоские механизмы, у которых начальные звенья образуют кинематические пары со стойкой.
Дата публикования: 2015-07-22; Прочитано: 2221 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
