 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Временные характеристики
|
|
Для исследования динамических свойств систем автоматического управления часто используются типовые переходные режимы работы (временные характеристики). Наибольшее применение находят следующие временные характеристики:
· переходная функция (характеристика) – реакция системы на единичный скачкообразный сигнал при нулевых начальных условиях;
· весовая функция (импульсная переходная характеристика) – реакция непрерывной системы на воздействие в виде δ-импульса Дирака, а для дискретной системы – на единичный импульс.
· реакция системы на ненулевые начальные условия.
По временным характеристикам можно определить ряд качественных показателей, характеризующих динамические свойства системы управления, в частности, перерегулирование, время переходного процесса и др.
В пакете Control System Toolbox имеется ряд функций для расчета и построения временных характеристик линейных систем. Основными из них являются step, impulse, initial.
Функция step вычисляет и отображает на экране переходную характеристику lti-модели. Она имеет несколько форм:
step (sys)
step (sys,t)
step (sys1, sys2,…,sysN)
step (sys1, sys2,…,sysN, t)
step (sys1, 'plotstyle1',…,sysN, 'plotstyleN')
step (sys1, 'plotstyle1',…,sysN, 'plotstyleN', t).
Здесь t – аргумент, задающий время моделирования в виде длительности переходного режима t=Tfinal (в секундах) или в виде вектора t=0:dt:Tfinal. Для дискретных моделей dt=Ts, а для непрерывных выбирается достаточно малым для учета быстрых изменений переходного процесса. Продолжительность моделирования при отсутствии аргумента t определяется автоматически. Остальные параметры функции step такие же, как в функциях nyquist и bode.
Пример 3.15. Построение переходной характеристики для непрерывной САУ с ПФ Ф(s) (рис.3.6).
>> step(f); grid on
 |
Рис. 3.6. Переходная характеристика
!! Задание 3.15. Постройте переходную функцию для дискретной САУ, заданной передаточной функцией замкнутой системы Т(z).
Для расчета переходной характеристики без ее построения используются две дополнительные формы функции step:
[y, t, x]= step(sys)
[y, t, x]= step(sys, t)
В этом случае функция step возвращает векторы значений выхода y, времени t и переменных состояния х (количество столбцов вектора х равно размерности lti-модели). Если модель представлена в tf или zpk формах, то параметр х опускается.
Пример 3.16. Расчет переходной характеристики с шагом 0.2 с без ее построения для непрерывной САУ с ПФ замкнутой системы Ф(s).
>> [y,t]=step(f,[0:0.2:4])
| y = 0 1.4753 6.1814 10.2384 12.4296 13.0739 12.8339 12.2280 11.5721 11.0248 10.6314 10.3729 10.2107 10.1104 10.0479 10.0075 9.9800 9.9607 9.9471 9.9379 9.9321 | t = 0 0.2000 0.4000 0.6000 0.8000 1.0000 1.2000 1.4000 1.6000 1.8000 2.0000 2.2000 2.4000 2.6000 2.8000 3.0000 3.2000 3.4000 3.6000 3.8000 4.0000 |
!! Задание 3.16. Произведите вычисление переходной функции дискретной системы с ПФ замкнутой САУ T(z) без ее построения.
Для расчета и построения импульсной переходной (весовой) характеристики используется функция impulse в таких же формах, как и функция step:
impulse (sys)
impulse (sys,t)
impulse (sys1, sys2,…,sysN)
impulse (sys1, sys2,…,sysN, t)
impulse (sys1, 'plotstyle1',…,sysN, 'plotstyleN')
impulse (sys1, 'plotstyle1',…,sysN, 'plotstyleN', t)
[y, t, x]= impulse (sys)
[y, t, x]= impulse (sys, t)
Пример 3.17. Построение весовой характеристики для линейной непрерывной САУ с ПФ замкнутой системы Ф(s) (рис.3.7).
>>impulse(f); grid on
 |
Рис. 3.7. Весовая характеристика
!! Задание 3.17. Постройте импульсную переходную характеристику для дискретной системы с ПФ замкнутой САУ Т(z).
Функция initial рассчитывает и строит график реакции ss-модели sys на ненулевые начальные условия. Она имеет несколько форм, эквивалентных функциям step и impulse:
initial (sys,х0)
initial (sys,х0,t)
initial (sys1, sys2,…,sysN,х0)
initial (sys1, sys2,…,sysN,х0, t)
initial (sys1, 'plotstyle1',…,sysN, 'plotstyleN',х0)
initial (sys1, 'plotstyle1',…,sysN, 'plotstyleN',х0, t)
[y, t, x]= initial (sys,х0)
[y, t, x]= initial (sys,х0, t)
Здесь х0 – вектор начальных условий lti-модели в пространстве состояний. Смысл остальных аргументов и возвращаемых величин такой же, как у функций step и impulse.
Пример 3.18. Построение реакции непрерывной системы, заданной математической моделью в пространстве состояний на единичное начальное условие по последней переменной состояния, т.е. х(0)=|0 0 0 0 0 0 1| (рис.3.8).
>> sys 18=ss(f); x0=[0 0 0 0 0 0 1];initial(sys 18,x0); grid on
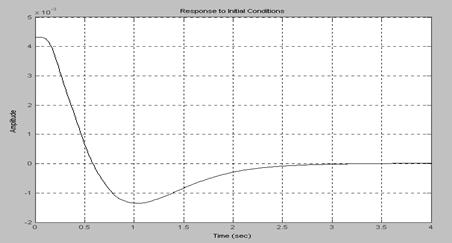 |
Рис. 3.8. Реакция по переменной состояния
!! Задание 3.18. Постройте график реакции дискретной системы с исходной ПФ T(z) и представленной ss-моделью на единичное начальное условие по второй переменной состояния х(0)=|0 1 0 0 0 0 0|.
К блоку временных функций пакета Control System Toolbox относится еще две функции: lsim – вычисление переходного процесса при произвольном входном воздействии, который формируется с помощью функции gensig – генерация периодического сигнала заданного типа (синусоида, импульсная последовательность и прямоугольный периодический сигнал). Однако на практике они используются редко, так как для моделирования систем при сложных воздействиях более удобен пакет Simulink.
Дата публикования: 2015-07-22; Прочитано: 732 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
