 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Следящая система рулевого электропривода с потенциометрическим управлением
|
|
Принцип построения систем рулевого электропривода следящего действия заключается в том, что угол перекладки пера руля задаётся постом управления, а электродвигатель рулевого устройства, отработав заданный угол перекладки, автоматически останавливается. Происходит как бы «слежение» электродвигателя рулевого устройства за положением задающего устройства поста управления.
На рис. 22.1 представлена схема рулевого электропривода следящего действия с потенцнометрическим управлением. Схема состоит из приводного двигателя Ml, элсктромашинного усилителя G1, генератора G2 и исполнительного двигателя М2. Двигатель Ml приводит во вращение генератор и ЭМУ, который используется в качестве возбудителя генератора G2. Рулевой электропривод выполнен по системе Г—Д, а ЭМУ имеет две обмотки управления LG1.I, LG1.2 и компенсационную LG1.3. Обмотка возбуждения двигателя LM2 и первая обмотка управления LG1.1 элсктромашпниого усилителя получают питание от независимого источника
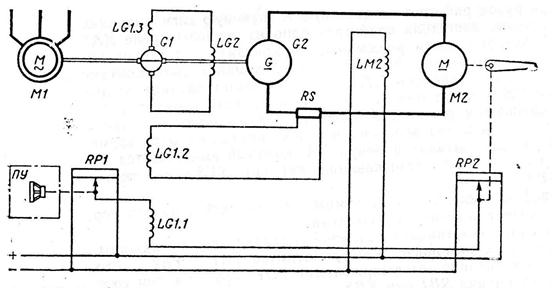 |
постоянного тока. Задающее устройство — потенциометрический датчик RP1 механически связан с рукояткой поста дистанционного управления (ПУ), а потенциометр-приемник RP2 имеет механическую связь с баллером руля. Обмотка управления LG1.1 включена в диагональ моста, образованного этими потенциометрами. Вторая обмотка управления LG1.2 включена в силовую цепь через шунт RS. Она выполняет функцию обратной связи по току нагрузки.
При одинаковом положении ползунков обоих потенциометров потенциалы их контактных щеток равны и по обмотке управления LG1.1 ток не проходит (Iy1 = 0). При переводе рукоятки ПУ в другое положение произойдет и перемещение ползунка потенциометра RP1. Потенциал его контактной щетки изменится в большую или меньшую сторону в зависимости от направления перемещения рукоятки ПУ. В обмотке управления LG1.1 потечет ток. На зажимах ЭМУ появится напряжение, а по обмотке возбуждения генератора LG2 пойдет ток. В результате на зажимах генератора G2 и двигателя М2 появится напряжение. Исполнительный двигатель начнет вращаться, перекладывая руль в заданном направлении.
Рис.22.1.. Следящая система рулевого электропривода с потенциометрическим управлением
Одновременно с поворотом баллера руля перемещается и ползунок потенциометра RP2, приближая потенциал своей контактной щетки к потенциалу контактной щетки потенциометра RP1. Когда потенциалы контактных щеток потенциометров RP1 и RP2 уравняются, прекратится ток в обмотке управления LG1.1. В результате двигатель М2 остановится, выполнив перекладку руля на заданный угол.
Для обеспечения стоянки двигателя под током и предотвращения больших перегрузок обмотка управления LG1.2 включена встречно с задающей обмоткой управления LG1.1. Такое включение обмоток управления ЭМУ позволяет ограничить ток в силовой цепи до допустимых значений.
Дата публикования: 2014-10-19; Прочитано: 4167 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
