 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Описание установки. На панели управления (рис.1) размещены тумблер 11 для включения и выключения электродвигателя; ручка 10 потенциометра
|
|
Установка ДП-5К смонтирована на металлическом основании (рис. 1) и состоит из электродвигателя 3 с тахометром 2, нагрузочного устройства 6 (магнитный порошковый тормоз) и испытуемого планетарного редуктора 5. Входной и выходной валы редуктора при помощи упругих муфт соединены с валами электродвигателя и нагрузочного устройства. На кронштейнах смонтированы измерительные устройства, состоящие из индикаторов 4 и 7, штоки которых упираются в плоские пружины.Статор электродвигателя установлен в подшипниках качения и может поворачиваться относительно оси, совпадающей с осью якоря. При работе электродвигателя на статор действует реактивный момент в направлении, противоположном вращению якоря. Такой двигатель называется балансирным.
На панели управления (рис.1) размещены тумблер 11 для включения и выключения электродвигателя; ручка 10 потенциометра, позволяющая бесступенчато регулировать частоту вращения электродвигателя; сигнальная лампочка, загорающаяся при включении электродвигателя; тумблер 9, включающий нагрузочное устройство, и ручка потенциометра 8 для регулировки тормозного момента.
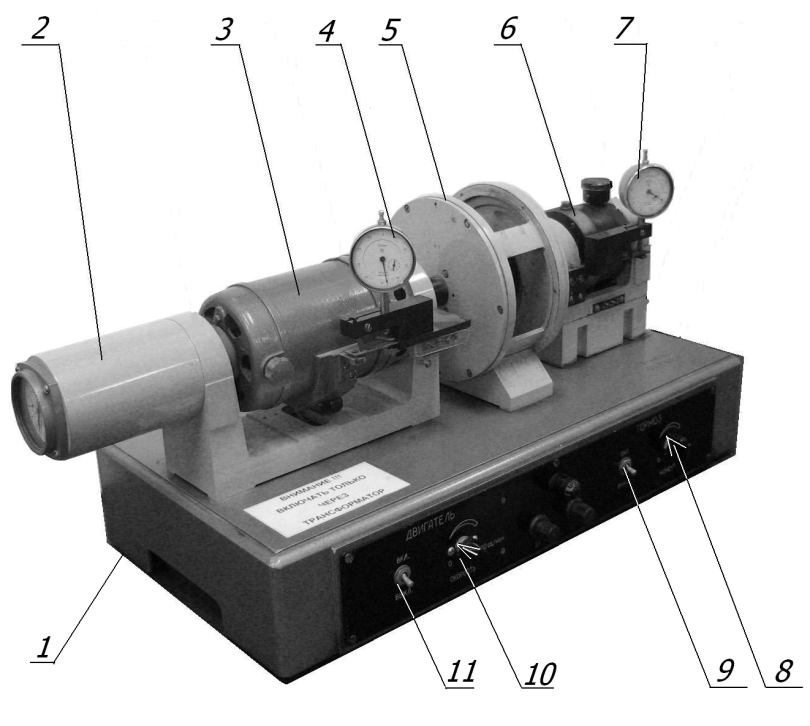
Рис. 1. Установка ДП–5К: 1 – корпус; 2 – тахометр; 3 – электродвигатель; 4, 7 – индикаторы;
5 – редуктор планетарный; 6 – тормоз порошковый (нагрузочное устройство);
8 – ручка регулирования нагрузки; 9 – тумблер включения нагрузочного
устройства; 10 – ручка регулирования частоты вращения электродвигателя;
11 – тумблер включения электродвигателя
Исследуемый планетарный зубчатый редуктор (рис. 2) состоит из центральных колес 1 (z1 = 17) и 2 (z2 = 87), водила Н и установленных в нем двух осей сателлитов, состоящих из колес 3 (z3 = 87) и 4 (z4 = 17).
При вращении центрального колеса 1 крутящий момент передается на сателлиты 3 и 4, которые жестко закреплены на одной оси и вращаются с постоянной угловой скоростью. Сателлит 4 обкатывается вокруг неподвижного центрального колеса 2 и приводит во вращение водило Н.
Момент Т 1, развиваемый электродвигателем, передается на редуктор и затем на нагрузочное устройство, создающее момент сопротивления Т 2.
Нагрузочное устройство, как и электродвигатель, имеет балансирную систему. Статор представляет собой электромагнит, а ротор – железный цилиндр. Магнитный зазор между ними заполнен смесью карбонильного железа с минеральным маслом. При подаче тока в обмотку электромагнита магнитная смесь оказывает сопротивление вращению ротора.
Для измерения величины момента, развиваемого электродвигателем, к статору прикреплен рычаг, который нажимает наплоскую пружину измерительного устройства. Деформация пружины фиксируется индикатором часового типа. Если пружину предварительно протарировать, т.е. установить зависимость показаний индикатора от момента Т 1, поворачивающего статор, то при выполнении опыта по показаниям индикатора можно судить о величине момента Т 1 двигателя.
В результате тарировки измерительного устройства электродвигателя установлена величина тарировочного коэффициента

Аналогично определена величина тарировочного коэффициента для нагрузочного устройства:


Рис. 2. Планетарный зубчатый редуктор: 1, 2 – центральное колесо; 3, 4 – сателлит; Н – водило

а) б) в) г) д)
Рис. 3. Условные обозначения на схемах по ГОСТ 2.770-68 и 2.703-68: а – передача зубчатая (цилиндрическая) с внешним зацеплением (без уточнения типа зубьев); б – блок зубчатых колес в подшипнике (без уточнения типа); в – подшипники качения радиальные (общее обозначение); г – соединение валов эластичное; д – подшипники скольжения радиальные
Дата публикования: 2014-10-19; Прочитано: 1034 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
