 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Средства обеспечения дисциплины 9 страница
|
|
| Форма тела | Расположение оси | Величина момента инерции |
| Обруч | 
| 
|
| Цилиндр | 
| 
|
| Шар | 
| 
|
| Примечание: m – масса тела, R0 – его радиус |

10. Теорема Штейнера
Рассмотрим произвольное тело и две параллельные друг другу оси, одна из которых (ось С) проходит через центр масс тела, а другая (ось О) отстоит от первой на расстояние а (рис. 7.11). Выберем оси координат  и
и  так, как показано на рис. 7.11.
так, как показано на рис. 7.11.

Рис. 7.11
Момент инерции относительно оси О определяется выражением

Разобьем это выражение на три суммы: 


Первая сумма представляет собой момент инерции  относительно оси, проходящей через центр масс. Сумма
относительно оси, проходящей через центр масс. Сумма  дает массу тела
дает массу тела  . Наконец,
. Наконец,  , где
, где  – координата центра масс, которая при сделанном выборе начала координат равна нулю. Таким образом, мы приходим к соотношению:
– координата центра масс, которая при сделанном выборе начала координат равна нулю. Таким образом, мы приходим к соотношению:
 (7.29)
(7.29)
Это соотношение выражает теорему Штейнера, которая гласит, что момент инерции  относительно произвольной оси равен сумме момента инерции
относительно произвольной оси равен сумме момента инерции  относительно оси, параллельной данной и проходящей через центр масс тела, и произведением массы т тела на квадрат расстояния а между осями.
относительно оси, параллельной данной и проходящей через центр масс тела, и произведением массы т тела на квадрат расстояния а между осями.
В соответствии с теоремой Штейнера момент инерции диска относительно оси ОґОґ, отстоящей на расстоянии  от оси, проходящей через центр масс,равен найденному нами моменту инерции (7.28) относительно оси, проходящей через центр диска, плюс
от оси, проходящей через центр масс,равен найденному нами моменту инерции (7.28) относительно оси, проходящей через центр диска, плюс  :
:  .
.
11. Закон сохранения момента импульса при вращательном движении
Сравним попарно между собой законы и формулы механики поступательного движения и механики вращательного движения: второй закон Ньютона – с основным законом динамики вращения, закон изменения импульса – с законом изменения момента импульса при вращении, выражение линейной скорости – с угловой скоростью и т.д. Бросается в глаза большое сходство в формулировках сравниваемых законов и в структуре сравниваемых формул. Каждой физической величине, характеризующей поступательное движение, соответствует определенная физическая величина, характеризующая вращательное движение. Эти примеры для наглядности представлены в таблице.
| Поступательное движение | Вращательное движение |
Время………………………….. t
Радиус-вектор…………………  Линейная скорость …………..
Линейная скорость …………..  Линейное ускорение …………
Линейное ускорение …………  Масса………………………….
Масса………………………….  Сила…………………………...
Сила…………………………...  Второй закон Ньютона
Второй закон Ньютона 
| Время………………………… t
Угол поворота………………  Угловая скорость…………...
Угловая скорость…………...  Угловое ускорение…………
Угловое ускорение…………  Момент инерции……………
Момент силы относительно оси
Момент инерции……………
Момент силы относительно оси
 Уравнение моментов
Уравнение моментов 
|
Обнаруженное сходство с законами поступательного движения характерно для всех законов вращательного движения. Пользуясь этим, напишем закон вращательного движения, аналогичный закону сохранения импульса материальной точки:
 , (7.30)
, (7.30)
или для системы тел:
 (7.31)
(7.31)
Выражение (7.31) носит название закона сохранения момента импульса: в изолированной системе сумма моментов импульса всех тел – величина постоянная.
Из формулы (7.30) следует, что изменение момента инерции тела должно сопровождаться изменением угловой скорости вращения тела: увеличение (уменьшение) момента инерции вызывает соответствующее уменьшение (увеличение) угловой скорости. Это следствие рассматриваемого закона доказывает в частности «скамья Жуковского».
Человек с расставленными в стороны руками вращается, стоя на скамье Жуковского. Затем он быстро опускает руки. При этом его момент инерции уменьшается, а угловая скорость увеличивается. На законе сохранения импульса основаны акробатический прием «сальто-мортале», балетный прием «пируэт» и т.п. Все свободные гироскопы действуют на основе этого закона: вращающаяся с большой скоростью масса сохраняет постоянным ось своего вращения. Этим объясняется устойчивость оси Земли, вертикальная устойчивость движущегося велосипеда и т.п.
12. Кинетическая энергия вращающегося тела
По аналогии с поступательным движением запишем выражение:  , где – момент инерции,
, где – момент инерции,  – угловая скорость вращения тела.
– угловая скорость вращения тела.
Действительно, кинетическая энергия одной частицы вращающегося тела массой  , движущейся со скоростью
, движущейся со скоростью  по окружности радиусом
по окружности радиусом  , равна
, равна  , где
, где  – момент инерции частицы, – угловая скорость вращения тела. Тогда, суммируя энергии всех частиц, составляющих тело, получим выражение кинетической энергии вращающегося тела:
– момент инерции частицы, – угловая скорость вращения тела. Тогда, суммируя энергии всех частиц, составляющих тело, получим выражение кинетической энергии вращающегося тела:

За счет кинетической энергии вращения тело может совершать работу. Эта работа должна равняться изменению кинетической энергии вращения  , где
, где  и – начальная и конечная угловые скорости вращения. Кинетическая энергия вращающихся тел используется в технике, например, при внезапном увеличении нагрузки машина не останавливается, а совершает работу за счет запаса кинетической энергии вращения маховика.
и – начальная и конечная угловые скорости вращения. Кинетическая энергия вращающихся тел используется в технике, например, при внезапном увеличении нагрузки машина не останавливается, а совершает работу за счет запаса кинетической энергии вращения маховика.
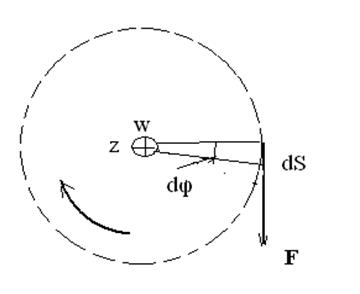
Найдем работу, совершаемую внешней силой при вращении твердого тела. Рассмотрим частный случай, когда сила направлена по касательной к окружности, по которой движется точка приложения силы (рис. 7.12). В этом случае сила  и перемещение
и перемещение  точки ее приложения коллинеарны. Элементарная работа
точки ее приложения коллинеарны. Элементарная работа
 (7.32)
(7.32)
| Рис.7.12 |
Поскольку направления оси  и вектора
и вектора  совпадают, формулу (7.32) можно представить в виде
совпадают, формулу (7.32) можно представить в виде
 , (7.33)
, (7.33)
где  – проекция вектора
– проекция вектора  на направление вектора .
на направление вектора .
13. Кинетическая энергия тела при плоском движении
Представим плоское движение тела как наложение поступательного движения со скоростью  некоторой точки О и вращения вокруг оси, проходящей через эту точку, с угловой скоростью . В этом случае скорость i -ой элементарной массы тела определяется формулой
некоторой точки О и вращения вокруг оси, проходящей через эту точку, с угловой скоростью . В этом случае скорость i -ой элементарной массы тела определяется формулой
 , (7.34)
, (7.34)
где  – радиус-вектор i -ой массы, проведенной из точки О (рис. 7.13).
– радиус-вектор i -ой массы, проведенной из точки О (рис. 7.13).
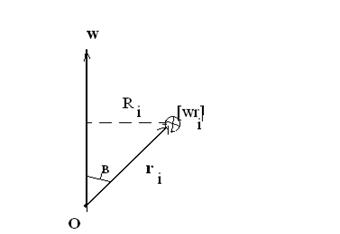
Рис. 7.13
Кинетическая энергия i -ой элементарной массы равна
 (7.35)
(7.35)
Возведение в квадрат (7.34) с учетом (7.35) дает
 .
.
Просуммировав по всем элементарным массам, найдем кинетическую энергию тела: 
Разобьем полученное выражение на три слагаемых, вынося при этом постоянные множители за знак суммы:
 (7.36)
(7.36)
Сумма элементарных масс даст массу тела  Следовательно, первое слагаемое равно
Следовательно, первое слагаемое равно  .
.
Третье слагаемое в (7.36) равно  , где
, где  – момент инерции тела относительно оси вращения О.
– момент инерции тела относительно оси вращения О.
Второе слагаемое можно представить в виде  , где
, где  – радиус-вектор, центра масс, проведенный из точки О.С учетом сказанного можно написать, что
– радиус-вектор, центра масс, проведенный из точки О.С учетом сказанного можно написать, что 
В первое слагаемое входят только величины, характеризующие поступательное движение, в третье – только величины, характеризующие вращательное движение. Второе же слагаемое содержит величины, характеризующие как поступательное, так и вращательное движение.
Если в качестве точки О взять центр масс тела С, то будет равен нулю и последняя формула упростится:  , где
, где  – скорость центра масс, – момент инерции тела относительно оси, проходящей через центр масс.
– скорость центра масс, – момент инерции тела относительно оси, проходящей через центр масс.
Таким образом, если разбить плоское движение тела на поступательное со скоростью центра масс и вращение вокруг оси, проходящей через центр масс, то кинетическая энергия распадается на два независимых слагаемых, одно из которых определяется только величинами, характеризующими поступательное движение, а другое – только величинами, характеризующими вращение.
14. Свободные оси вращения
Существуют такие оси вращения тел, которые не изменяют своей ориентации вращения в пространстве без действия на нее внешних сил. Эти оси называются свободными осями вращения (или осями свободного вращения). Можно показать, что в любом теле существуют три взаимно перпендикулярные оси, проходящие через центр масс тела, которые могут служить свободными осями. Они называются главными осями инерции тела. Например, главные оси инерции однородного прямоугольного параллелепипеда проходят через центры противоположных граней (рис. 7.14).

Рис. 7.14
Для однородного цилиндра одной из главных осей инерции является его геометрическая ось, а в качестве остальных осей могут быть две любые взаимно перпендикулярные оси, проведенные через центр масс в плоскости, перпендикулярной геометрической оси цилиндра. Главными осями инерции шара являются любые три взаимно перпендикулярные оси, проходящие через центр масс.
Для устойчивости вращения большое значение имеет, какая именно из свободных осей служит осью вращения.
Вращение вокруг главных осей с наибольшим и наименьшим моментами инерции оказывается устойчивым, а вращение около осей со средним моментом – неустойчивым. Так, если тело, имеющее форму параллелепипеда, подбросить, одновременно приведя его во вращение, то он, падая, будет устойчиво вращаться вокруг осей 1 и 2.
15. Гироскоп
Свойство свободных осей сохранять свое положение в пространстве широко применяется в технике, наиболее интересны в этом плане гироскопы.
Гироскопом (или волчком) называется массивное симметричное тело, вращающееся с большой скоростью вокруг оси симметрии. У симметричного тела направления момента импульса  и угловой скорости совпадают, поэтому
и угловой скорости совпадают, поэтому  . Вследствие массивности гироскопа его момент инерции очень велик, велика также угловая скорость.
. Вследствие массивности гироскопа его момент инерции очень велик, велика также угловая скорость.
Рассмотрим гироскоп, ось которого закреплена одним концом в шарнире О, вокруг которого она может поворачиваться без трения произвольным образом (рис. 7.15).

|
Рис.7.15. Ось гироскопа ОА, ось ВВ и сила F лежат в плоскости чертежа. Векторы М и  направлены за чертеж. Ось DD перпендикулярна к плоскости чертежа направлены за чертеж. Ось DD перпендикулярна к плоскости чертежа
|
Попытаемся повернуть ось гироскопа ОА вокруг оси DD, подействовав на свободный конец оси силой F в течение времени dt. Однако гироскоп «проявит непослушание» – его ось повернется не вокруг оси DD, а вокруг оси ВВ, приняв положение ОА'. Это, казалось бы, противоестественное поведение гироскопа называют гироскопическим эффектом.
Гироскопический эффект находится в полном согласии с законами механики твердого тела. Действительно, согласно уравнению изменения момента импульса со временем в результате действия силы F в течение времени dt момент импульса L получит приращение  . Обозначим через М – момент силы F относительно точки О. Тогда изменение момента импульса равно . Новое значение момента импульса, равно
. Обозначим через М – момент силы F относительно точки О. Тогда изменение момента импульса равно . Новое значение момента импульса, равно  . Оноокажется повернутым вокруг оси ВВ относительно первоначального значения L. Поскольку вектор L направлен вдоль оси гироскопа, вместе с L повернется и ось, перейдя из положения О А в положение О А'.
. Оноокажется повернутым вокруг оси ВВ относительно первоначального значения L. Поскольку вектор L направлен вдоль оси гироскопа, вместе с L повернется и ось, перейдя из положения О А в положение О А'.
Гироскопический эффект является причиной того, что хорошо раскрученный детский волчок не опрокидывается под действием силы тяжести. Это действие приводит лишь к тому, что ось волчка поворачивается, описывая конус. Такое движение оси называется прецессией.
Рассмотрим простейший вид прецессии, называемый регулярной прецессией. Пусть один из концов оси гироскопа закреплен в шаровом шарнире О, позволяющем ей свободно поворачиваться в любом направлении (рис. 7.15). На гироскоп действует сила тяжести, которая лежит в вертикальной плоскости ОАО'. Обозначим через т – массу гироскопа вместе с осью. Момент силы М перпендикулярен к этой плоскости. Пусть b – расстояние от шарнира О до центра масс гироскопа С,  – угол, образованный осью гироскопа с вертикалью. Тогда плечо силы
– угол, образованный осью гироскопа с вертикалью. Тогда плечо силы  . За время dt момент импульса получает приращение , в результате чего вертикальная плоскость, в которой лежат ось гироскопа и сила тяжести m g, поворачивается на угол
. За время dt момент импульса получает приращение , в результате чего вертикальная плоскость, в которой лежат ось гироскопа и сила тяжести m g, поворачивается на угол  . Вместе с ней поворачивается и вектор
. Вместе с ней поворачивается и вектор  . Расстояние О'А численно равно
. Расстояние О'А численно равно  .
.
Таким образом, на гироскоп действует опрокидывающий момент  . Будем откладывать вектор момента импульса гироскопа L из точки О. В момент времени t вектор L изображается отрезком ОА. За время dt вектор L получит перпендикулярное к нему приращение ,в результате чего он, оставаясь постоянным по модулю и не изменяя угла с вертикалью, переходит в положение ОВ. В новом положении имеет место такое же взаимное расположение векторов L и М, какое было в момент t. Поэтому за последующий элемент времени dt вертикальная плоскость, в которой лежит ось гироскопа, снова повернется на угол и т.д. В итоге ось гироскопа будет поворачиваться вокруг вертикальной оси, описывая конус с углом раствора 2 . При этом вектор L будет изменяться только по направлению, оставаясь неизменным по модулю. Это объясняется тем, что элементарные приращения все время будут перпендикулярными вектору L. Аналогично ведет себя вектор скорости при равномерном движении частицы по окружности. Вектор v получает за время dt перпендикулярное к нему приращение
. Будем откладывать вектор момента импульса гироскопа L из точки О. В момент времени t вектор L изображается отрезком ОА. За время dt вектор L получит перпендикулярное к нему приращение ,в результате чего он, оставаясь постоянным по модулю и не изменяя угла с вертикалью, переходит в положение ОВ. В новом положении имеет место такое же взаимное расположение векторов L и М, какое было в момент t. Поэтому за последующий элемент времени dt вертикальная плоскость, в которой лежит ось гироскопа, снова повернется на угол и т.д. В итоге ось гироскопа будет поворачиваться вокруг вертикальной оси, описывая конус с углом раствора 2 . При этом вектор L будет изменяться только по направлению, оставаясь неизменным по модулю. Это объясняется тем, что элементарные приращения все время будут перпендикулярными вектору L. Аналогично ведет себя вектор скорости при равномерном движении частицы по окружности. Вектор v получает за время dt перпендикулярное к нему приращение  , где
, где  – постоянное по модулю нормальное ускорение. В результате изменяется только направление вектора
– постоянное по модулю нормальное ускорение. В результате изменяется только направление вектора  , модуль же его остается постоянным.
, модуль же его остается постоянным.

| Рис. 7.16. |
Таким образом, в поле сил тяжести ось гироскопа с неподвижной точкой поворачивается вокруг вертикали, описывая конус. В случае, когда  , конус вырождается в плоскость. Такое движение гироскопа называется регулярной прецессией. Угловую скорость прецессии
, конус вырождается в плоскость. Такое движение гироскопа называется регулярной прецессией. Угловую скорость прецессии  можно найти, разделив угол на соответствующее время dt. Из рис. 7.16 следует, что
можно найти, разделив угол на соответствующее время dt. Из рис. 7.16 следует, что  .
.
Из соотношения вытекает, что  . Поэтому
. Поэтому  .
.
Отсюда, с учетом того, что , a  получаем формулу
получаем формулу
 (7.37)
(7.37)
Здесь I – момент инерции вращающихся частей гироскопа,  – угловая скорость вращения гироскопа вокруг своей оси,
– угловая скорость вращения гироскопа вокруг своей оси,  – расстояние oт центра масс гироскопа.
– расстояние oт центра масс гироскопа.
Из формулы (7.37) видно, что угловая скорость прецессии не зависит от угла , образованного осью гироскопа с направлением вверх по вертикали (этот угол может иметь значения от 0 до  ).
).
Нужно иметь в виду, что формула (7.37) справедлива только при условии, что
 (7.38)
(7.38)
Действительно, прецессирующий гироскоп участвует одновременно в двух вращениях, совершающихся со скоростью и . Поэтому его момент импульса определяется выражением, более сложным, чем . Только при соблюдении условия (7.38) можно полагать, что .
Из формулы (7.37) следует, что условие (7.38) эквивалентно условию  , т.е.
, т.е.  .
.
Выражение mgb по порядку величины равно потенциальной энергии гироскопа Ер. Выражение  по порядкуесть кинетическая энергия гироскопа Ек.. Поэтому условие справедливости формулы (7.37) можно представить в виде
по порядкуесть кинетическая энергия гироскопа Ек.. Поэтому условие справедливости формулы (7.37) можно представить в виде  .
.
Вычислим полную механическую энергию гироскопа. За нуль примем значение потенциальной энергии при . Будем считать, что можно пренебречь по сравнению с . Тогда полная механическая энергия гироскопа определяется выражением  .
.
В отсутствие трения полная энергия сохраняется, следовательно, также не уменьшается. Отсюда следует, что = const. К этому результату мы уже пришли ранее.
16. Степени свободы и связи абсолютно твердого тела
Число независимых координат, однозначно определяющих положение тела в пространстве, называется степенью свободы. Ясно, что положение точки в пространстве можно характеризовать тремя прямоугольными координатами  . Вместо таких координат можно взять и полярные координаты. Но их будет не более трех. Поэтому говорят, что материальная точка обладает тремя степенями свободы.
. Вместо таких координат можно взять и полярные координаты. Но их будет не более трех. Поэтому говорят, что материальная точка обладает тремя степенями свободы.
Однако не всегда перемещение точки в заданных условиях будет каким угодно. Рассмотрим, например, маленький шарик, привязанный к концу нерастяжимой нити, другой конец которой закреплен. Если нить натянута, то шарик может перемещаться только по поверхности сферы с центром в точке закрепления. Можно привести и другие примеры, в которых материальная точка все время вынуждена находиться на какой-либо заданной поверхности. В таких случаях говорят, что на ее движение наложены связи. Координаты такой точки должны соответствовать соотношению вида  , который является уравнением рассматриваемой поверхности. Ввиду этого остаются независимыми только две координаты. Третья координата может быть вычислена из уравнения связи . В этих случаях точка обладает двумя степенями свободы.
, который является уравнением рассматриваемой поверхности. Ввиду этого остаются независимыми только две координаты. Третья координата может быть вычислена из уравнения связи . В этих случаях точка обладает двумя степенями свободы.
Пусть имеется механическая система, состоящая из произвольного числа  материальных точек. Если эти точки движутся без всяких ограничений, то для мгновенного определения их положения надо задать
материальных точек. Если эти точки движутся без всяких ограничений, то для мгновенного определения их положения надо задать  координат. Следовательно, система имеет степени свободы. Однако в некоторых случаях свобода перемещения точек ограничена. На координат налагаются дополнительные условия, называемые связями. Обозначим его
координат. Следовательно, система имеет степени свободы. Однако в некоторых случаях свобода перемещения точек ограничена. На координат налагаются дополнительные условия, называемые связями. Обозначим его  . Следовательно, данная механическая система имеет
. Следовательно, данная механическая система имеет  степени свободы.
степени свободы.
Дата публикования: 2014-11-18; Прочитано: 332 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
