В рассматриваемой группе Ассура присутствует шатун и ползун, связанные между собой вращательной кинематической парой (шарниром). Ползун движется по направляющей, которая чаще всего неподвижна как, например, цилиндр поршневой машины. Однако конструктивное исполнение звеньев структурной группы II класса 2-го вида очень разнообразно. Они применяются как составные части различных прессов, насосов, питателей, приборов, в которых присутствуют и структурные группы других видов и классов [1].
В этом разделе будут изложены приемы наиболее удачного выбора осей координат для описания положений точек звеньев. Для решения задачи удобно выбирать такую декартовую систему координат, в которой ось X 1всегда лежит на направляющей перемещения ползуна. Причем положительное направление выбирается от точки связи C в сторону ползуна (рис. 2.33).
Систему координат обозначим X 1 O 1 Y 1. Координаты точки связи C будем считать известными функциями положения ведущего звена механизма, например, обобщенной координаты φ: X 1 C (φ), Y 1 C (φ). Геометрические размеры  ,
,  известны. В реальном механизме угол α между шатуном СЕ и направляющей для перемещения ползуна Е будет всегда острый.
известны. В реальном механизме угол α между шатуном СЕ и направляющей для перемещения ползуна Е будет всегда острый.






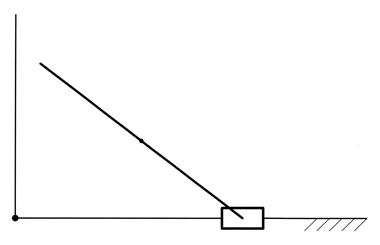
Рис.2.33. К выбору системы координат для структурной группы
Для определения угла α имеем
 (2.46)
(2.46)
Откуда
 (2.47)
(2.47)
Для координат точки Е ползуна получим
 (2.48)
(2.48)
Угловое положение шатуна по отношению к положительному направлению оси Х 1будет равно π - α. Координаты центра тяжести S шатуна СЕ определяется по следующим формулам:
 (2.49)
(2.49)
Использование описания положений звеньев в собственной системе координат рассмотрим на примере. На рис. 2.34 показан механизм, в котором структурная группа II класса 2-го вида присоединена непосредственно к ведущему звену и стойке. Такой механизм называют кривошипно-ползунным. Геометрическая ось О вращения кривошипа ОА располагается вне направляющей. Кратчайшее расстояние между осью вращения кривошипа и неподвижной направляющей называется эксцентриситетом, размер которого в данном случае равен е. В частном случае механизм может быть центральным, т.е. е = 0. Обозначим длину кривошипа  , а длину шатуна
, а длину шатуна  . Условия существования кривошипно-ползунного механизмаследующие:
. Условия существования кривошипно-ползунного механизмаследующие: 
 Крайние точки хода ползуна получаются,когда центры шарниров кривошипа и шатуна располагаются на одной линии.
Крайние точки хода ползуна получаются,когда центры шарниров кривошипа и шатуна располагаются на одной линии.




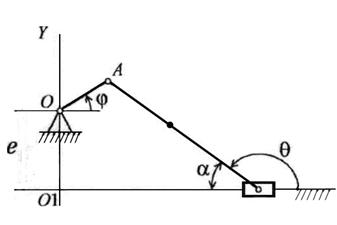
Рис.2.34. Кривошипно-шатунный механизм
Для определения положений звеньев выбираем систему координат XO 1 Y так, как показано на рис 2.34.
Если выбранную систему координат сравнить с системой координат рис. 2.33, то будет видно, что они совпадают. Координаты пальца А кривошипа являются координатами точки связи между шатуном и кривошипом. На основании (2.34) имеем

Таким образом, координаты кинематической пары А являются функциями XA (φ), YA (φ).
Следовательно, на основании (2.46)  . Используя (2.47), находим угловое положение шатуна
. Используя (2.47), находим угловое положение шатуна  по отношению к положительному направлению оси абсцисс О 1 Х. Для определения координат ползуна Е следует использовать формулы (2.48), для координат точки S шатуна формулы (2.49).
по отношению к положительному направлению оси абсцисс О 1 Х. Для определения координат ползуна Е следует использовать формулы (2.48), для координат точки S шатуна формулы (2.49).

