 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Моделирование линейных цифровых систем автоматического управления в MATLAB
|
|
Рассмотрим особенности моделирования цифровых систем автоматического управления на примере системы позиционирования магнитной головки жесткого диска ПЭВМ. На основании уравнения Ньютона дифференциальное уравнение вращательного движения магнитной головки имеет вид:
 (18)
(18)
где J - момент инерции рычага, на котором установлен блок магнитной головки;
С - коэффициент вязкого трения в опоре рычага;
K – коэффициент жесткости пружины;
Ki – коэффициент передачи двигателя (по моменту);
i (t) – ток якоря двигателя;
j (t) – угловое положение рычага головки.
Если принять за входную величину ток двигателя i (t), а за выходную – угол поворота j (t), то, применяя к уравнению (1) преобразование Лапласа, получим
 . (19)
. (19)
Создадим tf -модель при следующих исходных данных: J = 0,01 кг×м2, K = 10 Н×м/рад, C = 0,004 Н×м/(рад/с), Ki = 0,05 Н×м/А:
» J = 0.01; C = 0.004; K = 10; Ki = 0.05;
» num = Ki;
» den = [J C K];
» H = tf(num,den)
Transfer function:
0.05
-----------------------
0.01s^2 + 0.004s + 10
В рассматриваемой примере ставится задача проектирования цифровой системы позиционирования магнитной головки жесткого диска. Поскольку система управления имеет в своем составе аналого-цифровой преобразователь, то, переходя от непрерывной модели объекта к дискретной, получим:
» Ts = 0.005;
» Hd = c2d(H,Ts,'zoh')
Transfer function:
6.233e-005z + 6.229e-005
-------------------------
z^2 - 1.973z + 0.998
Sampling time: 0.005
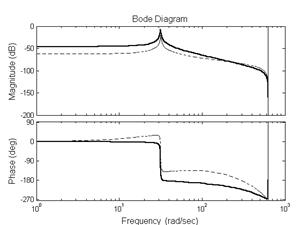
Для преобразования непрерывной модели в дискретную здесь использована функция c2d, у которой период квантования Ts = 0.005 c, а для дискретизации выбран метод 'zoh'. Проверку качества выполненной дискретизации непрерывного объекта можно выполнить, рассмотрев частотные характеристики непрерывной и дискретной моделей объектов (рис. 20):
» bode(H,'-',Hd,'--')
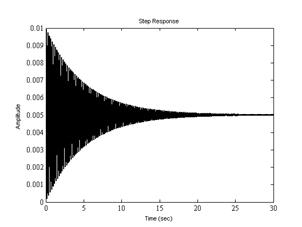
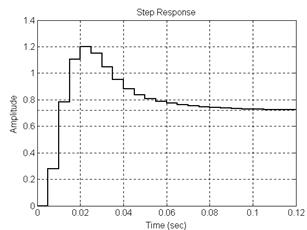
Если в дискретной системе автоматического позиционирования магнитной головки жесткого диска не использовать корректирующие устройства, то переходный процесс, определяемый функцией step, имеет вид(рис. 21):
» step(Hd)

| 
|
| Рис. 20. Частотные характеристики объекта | Рис. 21. Переходная характеристика объекта |
Большая длительность переходного процесса системы и высокая колебательность свидетельствуют о ее слабом демпфировании. В дискретной системе близость полюсов передаточной функции к окружности единичного радиуса свидетельствует о неудовлетворительных показателях устойчивости системы. Получим с помощью функции damp собственные значения рассматриваемой системы и соответствующие им собственную частоту и коэффициент демпфирования:
» damp(Hd);
| Eigenvalue | Magnitude | Equiv.Damping | Equiv. Freq.(rad/s) |
| 9.87e-001+1.57e-001i | 9.99e-001 | 6.32e-003 | 3.16e+001 |
| 9.87e-001-1.57e-001i | 9.99e-001 | 6.32e-003 | 3.16e+001 |
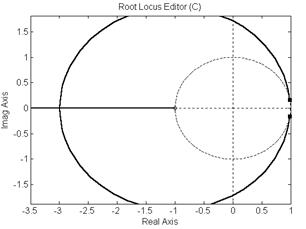
Отсюда видно, что полюса расположены вблизи окружности единичного радиуса и система, вследствие этого, имеет слабое демпфирование. Таким образом, необходим дискретный регулятор, который увеличит демпфирование в системе. Решим поставленную задачу с помощью метода корневого годографа (МКГ) (см. лабораторную работу № 1). Для этого с помощью функции rltool выполним загрузку основного окна интерфейса МКГ. Далее из меню File с помощью Import Model импортируем модель Hd в блок объекта G. В результате получим распределение (рис. 22) нулей и полюсов модели.
| 
|
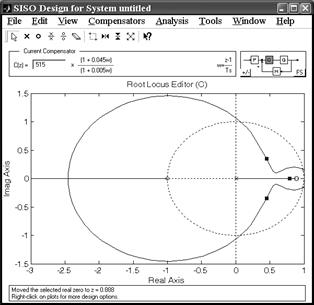
| Рис. 22. Распределение нулей и полюсов модели объекта | Рис. 23. Распределение нулей и полюсов модели системы управления |
Если выбрать параметры компенсатора с передаточной функцией, показанной на рис. 23, то получим переходный процесс в системе, изображенный на рис. 24.
| 
|
| Рис. 24. Переходный процесс в системе с компенсатором | Рис. 25. Частотные характеристики исходной и скорректированной систем |
Если параметры полученного переходного процесса не отвечают требованиям на проектирование, то, изменяя положение полюса и значение коэффициента передачи компенсатора, получают оптимальный переходный процесс. В частности, полученное быстродействие системы (около 0,1 с) не отвечает современным требованиям к управлению магнитными головками. Можно попытаться усложнить передаточную функцию компенсатора, добавив нули и полюса, хотя демпфирование магнитной головки низкое и добиться высокого быстродействия затруднительно.
Синтез дискретного корректирующего устройства рассматриваемой системы можно выполнить с помощью функций Control System Toolbox. В частности после определения дискретной передаточной функции объекта дискретная модель компенсатора может быть получена с помощью функции
» Komp=tf([1 -0.85],[1 0],Ts)%Формирование модели компенсатора
Transfer function:
z - 0.85
--------
z
Sampling time: 0.005
» Hp=Hd*Komp %Формирование разомкнутого контура
С помощью функции
» bode(Hd,'--',Hp,'-')
можно выяснить, как модифицирует выбранный компенсатор частотные характеристики системы (рис. 25).
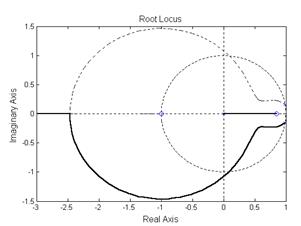
| Анализируя частотные характеристики системы, видим, что компенсатор сдвигает фазовую характеристику вверх (вводится опережение по фазе). Корневой годограф контура с компенсатором (рис. 26) можно определить с помощью функции » rlocus(Hp), zgrid Далее используя функцию » k,poles]=rlocfind(Hp), задают оптимальное расположение полюсов: |
| Рис. 26. Корневой годограф контура с компенсатором |
Select a point in the graphics window
selected_point =
0.2995 - 0.1024i
k = 3.5241e+003
poles =
0.7081 + 0.2276i
0.7081 - 0.2276i
0.3373
Определим демпфирование замкнутой системы:
» ddamp(poles,Ts)
| Eigenvalue | Magnitude | Equiv.Damping | Equiv. Freq.(rad/s) |
| 7.08e-001+2.28e-001i | 7.44e-001 | 6.90e-001 | 8.59e+001 |
| 7.08e-001-2.28e-001i | 7.44e-001 | 6.90e-001 | 8.59e+001 |
| 3.37e-001 | 3.37e-001 | 1.00e+000 | 2.17e+002 |
Чтобы оценить результаты синтеза системы, сформируем замкнутую систему и построим для нее переходную функцию:
» Hsam=feedback(Hp,k)
Transfer function:
6.233e-005 z^2 + 9.308e-006 z - 5.294e-005
------------------------------------------
z^3 - 1.753 z^2 + 1.031 z - 0.1866
Sampling time: 0.005
» step(Hsam)
Для определения показателей устойчивости системы воспользуемся функцией margin, предварительно учтя в передаточной функции разомкнутой системы найденной с помощью функции rlocfind значение k:
» olk=k*Hp;
» [Gm,Pm,Wcg,Wcp]=margin(olk);
» Margins=[Gm Wcg Pm Wcp]
Margins =
4.4302 296.7989 44.5498 94.8787
Дата публикования: 2015-09-18; Прочитано: 752 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
