 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Арифметические» операции с моделями
|
|
Функции этой группы позволяют создавать и изменять структуры динамических систем. Внешне они подобны арифметическим операторам,но операндами в данном случае являются LTI-модели.
· plus (minus) или + (-) – сложение (вычитание) LTI-моделей (параллельное соединение);
· mtimes или * – умножение LTI-моделей (последовательное соединение);
· \ – левое деление (sysl\sys2 равносильно inv(sysl)*sys2);
· / – правое деление (sysl/sys2 равносильно sysl*inv(sys2));
· ^ – возведение LTI-модели в степень (последовательное соединение нескольких одинаковых LTI-моделей);
· ' – операция pertransposition, означающая замену матрицы системы А (р) на матрицу [ А (-р)]Т; для дискретных моделей – замена матрицы А (z) на матрицу A (z-1)]T;
·.' – транспонирование модели;
· [.. ] – горизонтальное/вертикальное объединение LTI-моделей, т.е. такое их объединение, когда входы становятся общими, а выходы остаются независимыми. Для такого объединения необходимо, чтобы число входов объединяемых моделей было одинаковым, тогда число входов в результирующей модели останется таким же, как и в каждой из объединяемых моделей, а число выходов будет равно сумме выходов объединяемых моделей;
· inv – обращение LTI-модели (замена входов на выходы и наоборот);
· feedback – соединение двух звеньев, при котором второе звено составляет цепь отрицательной обратной связи для первого звена.
Рассмотрим в качестве примера создание модели линейной стационарной системы с передаточной функцией в разомкнутом состоянии  , охваченной единичной отрицательной обратной связью.
, охваченной единичной отрицательной обратной связью.
» W1=tf([0 100],[1 0]);
» W2=tf([1 1],[5 1]);
» W3=tf([1 1],[5 1]);
» W4=tf([0 1],[0.1 1]);
» W5=W1*W2*W3*W4;
» Woc=1;
» sys=feedback(W5, Woc)
Transfer function:
100 s^2 + 200 s + 100
------------------------------------------
2.5 s^4 + 26 s^3 + 110.1 s^2 + 201 s + 100
Эту же систему более просто можно создать с помощью приложения Simulink (рис. 14).
|
| Рис. 14. S–модель системы автоматического управления |
Если теперь выполнить анализ системы с помощью интерактивного обозревателя ltiview, который можно вызвать командой ltiview из главного окнаMATLAB, или с помощью команды Linear Analysis меню Tools созданной S-модели. После выполнения команды на экране появляется окно LTI Viewer, из меню File которогос помощью команды Export необходимо осуществить загрузку модели в рабочее пространство. Далее с помощью функции tf(sys_1), где sys_1 имя системы, под которым она загружена в рабочее пространство, из командного окна MATLAB можно найти нужную передаточную функцию системы:
» tf(sys_1)
Transfer function from input "Input Point" to output "Output Point":
40 s^2 + 80 s + 40
----------------------------------------
s^4 + 10.4 s^3 + 44.04 s^2 + 80.4 s + 40
Полученное выражение полностью совпадает с найденной ранее передаточной функцией замкнутой системы (после сокращения числителя и знаменателя на 2,5).
Если потребуется найти передаточную функцию по ошибке, то достаточно в S-модели назначить другой выход (рис. 2).
|
| Рис. 15. S-модель системы для определения передаточной функции по ошибке |
» tf(sys_2)
Transfer function from input "Input Point" to output "Output Point":
s^4 + 10.4 s^3 + 4.04 s^2 + 0.4 s + 2.842e-015
----------------------------------------------
s^4 + 10.4 s^3 + 44.04 s^2 + 80.4 s + 40
Анализ показывает, что последнее слагаемое числителя пренебрежимо мало по сравнению с другими, более того, оно должно отсутствовать в выражении передаточной функции системы по ошибке. Видимо, появление этого слагаемого следует отнести к недостаткам используемого приложения MATLAB.
Подобным образом очень легко “свертываются” структурные схемы сложных многоконтурных систем. Рассмотрим определение передаточной функции датчика натяжения нити с вращающимися нитепроводниками [2]. При использовании подсистем и пренебрежении моментом сухого трения в опорах датчика его S-модель имеет вид (рис. 16).
|
| Рис. 16. S-модель датчика натяжения нити |
Передаточная функция по каналу “натяжение-выход датчика” легко получается при использовании из командного окна MATLAB функции tf(datchik_lin_analysis_1):
tf(datchik_lin_analysis_1)
Transfer function from input "Input Point" to output "Output Point":
4.636e004s^5+6.074e006s^4+1.941e008s^3+2.643e009s^2+
-------------------------------------------------------®
s^8+146s^7+1.029e004s^6+4.97e005s^5+1.618e007s^4+
+1.66e010s+3.976e010
®-----------------------------------------------
+3.089e008s^3+3.265e009s^2+1.772e010s+3.859e010
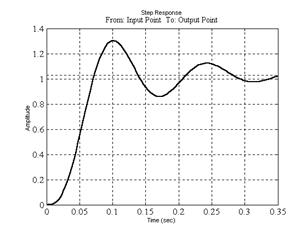
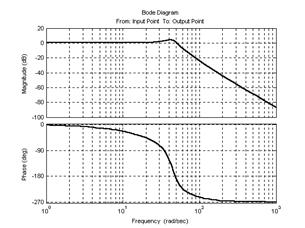
С помощью полученной передаточной функции можно легко получить переходную и частотные характеристики датчика:
» step(tf(datchik_lin_analysis_1))
» bode(tf(datchik_lin_analysis_1))
| 
|
| Рис. 17. Переходная характеристика датчика | Рис. 18. Частотные характеристики датчика |
Сравнение характеристик, показанных на рис. 17 и 18, с аналогичными характеристиками, полученными с помощью приложения Simulink [2], показывает их полное совпадение.
Дата публикования: 2015-09-18; Прочитано: 222 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
