 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Принцип действия. Принцип действия корреляционного лага основан на измерении времени, затрачиваемого судном на прохождение некоторого участка пути
|
|
Принцип действия корреляционного лага основан на измерении времени, затрачиваемого судном на прохождение некоторого участка пути, длина которого определяется расстоянием между вибраторами гидроакустической антенны лага и принятым алгоритмом обработки информации.
Сущность процесса определения скорости можно понять, рассмотрев следующую упрошенную схему. Предположим, что на судне вдоль диаметральной плоскости (ДП) размешены две гидроакустические приёмопередающие антенны А1 и А2

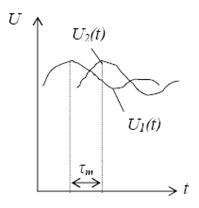
Рис. 6.10 Рис. 6.11
(рис. 6.10) на расстоянии l друг от друга. В режиме излучения эти антенны совместно с передавшим устройством (ПУ) формируют импульсы, которые распространяются в сторону дна, отражаются от него и возвращаются обратно. Принимаемые антеннами сигналы будут зависеть от отражающей способности грунта, рельефа дна, от параметров среды их распространения и представлять собой некоторые случайные процессы U1(t)и U2(t), изменяющиеся во времени (рис. 6.11). В связи с тем, что при отсутствии дрейфа судна антенна А2 проходит над теми же участками дна, что и антенна А1, процессы U1(t) и U2(t)будут аналогичны друг другу, но сдвинуты по времени на величину tm, которая получила название транспортного запаздывания. Очевидно, величина транспортного запаздывания зависит от расстояния l между антеннами и скорости V движения судна. В рассматриваемом случае будет иметь место следующее равенство:
 (6.16)
(6.16)
Отсюда может быть найдена скорость судна:
 (6.17)
(6.17)
Учитывая, что база l известна, задача определения скорости сводится к оценке значения транспортного запаздывания tm.
Транспортное запаздывание tmопределяется путём искусственной задержки сигнала первой антенны с помощью регулируемого блока задержки БЗ (рис. 6.10), который осуществляет смешение процесса U1(t)(рис. 6.11) вдоль оси времени. Для каждой задержки ti рассчитывается значение взаимной корреляционной функции (ВКФ) и эти значения сравниваются между собой. Очевидно, что при ti =tm смешение сигнала первой антенны вдоль оси времени будет таким, что процессы практически совпадут и величина ВКФ будет максимальной.
Учитывая сказанное, каждый корреляционный лаг должен включать в себя (рис. 6.10):
· антенную систему A:
· передающее устройство ПУ;
· усилители - преобразователи УП для придания принятому сигналу вида, удобного для дальнейшей обработки;
· регулируемый блок задержки БЗ;
· коррелятор, состоящий из множительного устройства МУ и интегратора И;
· устройства сравнения УС значений корреляционных функций;
· вычислитель В скорости, пути, пройденного судном и других величин; устройства индикации УИ.
Рассмотрим особенности устройства отдельных систем лага.
Дата публикования: 2014-11-19; Прочитано: 1544 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
