 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Достаточно общая теория управления и прочие элементы КОБ
|
|
ДОТУ является основной книгой, через которую происходит обстоятельное знакомство новичков с КОБ (хотя начальную информацию можно получить устно, из тематических брошюр или видеолекций). Специфическая теория ДОТУ – «научное» ядро всей Концепции. Ее дополняет также масса тематической литературы ВП СССР, в которой изложены различные аспекты теории КОБ и аналитика текущих событий в мире. Книга написана с использованием особых терминов, заимствованных из теории автоматического управления и регулирования, теории вероятностей и математической статистики, вычислительной математики, современных мистических учений, а также изобретенных самими авторами из-за недостатка существовавшей до этого терминологической базы.
У начавшего читать ДОТУ человека без высшего образования практически нет шансов понять что-либо без посторонней помощи, комментариев и разъяснений от более искушенных в КОБ товарищей. Каждый желающий разобраться в основах КОБ, должен сделать усилие, проявить терпение, настойчивость, открытость ума, чтобы терминология (понятийный аппарат) и основные идеи ДОТУ со временем стали для него максимально ясны и сопоставимы с соответствующими реальными ситуациями. Специфический язык и стиль изложения выбраны не случайно и не по неумению изъясняться проще. Напротив, по мнению создателей и сторонников Концепции, это наиболее подходящая «всеобщая» форма изложения, своеобразный междисциплинарный язык, рассчитанный на описание фундаментальных законов бытия, проявляющихся абсолютно во всем сущем. Аргументируется универсальность языка ДОТУ тем, что < все процессы во Вселенной можно рассматривать с точки зрения управления. Если мы знанием этого факта воспользуемся, то сможем разобраться в устройстве любого природного или общественного явления в объеме, достаточном для эффективного влияния на ход данного явления.
Управление – это действия субъекта, направленные на достижение поставленной заранее цели (задачи), но вынужденно корректируемой. Власть – реализуемая на практике способность управлять процессами в человеческом обществе. >
► Как коллектив авторов рекомендует изучать ДОТУ
В начале текста ДОТУ даются рекомендации по продуктивному усвоению ее особого материала.
< «ДОТУ разделена на подразделы, но воспринять её следует как целостную и неделимую информационную единицу – своего рода «квант» информации. … Некогда К.Прутков сказал: “Многие вещи нам непонятны не потому, что наши понятия слабы; но потому, что сии вещи не входят в круг наших понятий”. То есть проблемы понимания – результат отсутствия в психике необходимых стереотипов распознавания явлений и формирования их образов.
…
читая текст, рисовать для себя иллюстрации к тексту – схемы и образы рассматриваемых категорий и их взаимосвязей, состояний объектов, течения процессов и т.п., о чём идёт речь в тексте.
…
Успешное выполнение всякой работы требует соответствующего работе настроения – соответствия эмоций осознаваемому человеком смыслу его жизни и деятельности. Поэтому прежде, чем что-либо делать, научитесь ловить и удерживать искреннюю радость от осознания мысли «всё, что свершается, - свершается наилучшим возможным образом при той нравственности и этике, что свойственны людям; всё течёт к лучшему». Или иными словами, «Вседержитель не ошибается, и жизнь человека должна протекать в ладу с Ним в русле Его Промысла» и осознание этого факта должно вызывать внутреннюю умиротворённость и желание благодетельствовать Миру с открытой душой. В таком настроении, удерживая себя в нём, и надо всегда жить и работать, в том числе и над текстом ДОТУ». >
► Задачи управления
Теперь можно последовательно изучить все основные постулаты, термины и определения ДОТУ, чтобы пользоваться ими как азбукой или таблицей умножения – для хорошего понимания дальнейшего материала.
< «В теории управления возможна постановка всего двух задач.
Первая задача: мы хотим управлять объектом в процессе его функционирования сами непосредственно. Это задача управления.
Вторая задача: мы не хотим управлять объектом в процессе его функционирования, но хотим, чтобы объект – без нашего непосредственного вмешательства в процесс – самоуправлялся в приемлемом для нас режиме. Это задача самоуправления.
…
Для осознанной постановки и решения каждой из них и обеих задач совместно (когда одна сопутствует другой) необходимы три набора информации. …
Вектор целей управления (едино: самоуправления, где не оговорено отличие), представляющий собой описание идеального режима функционирования (поведения) объекта. Вектор целей управления строится по субъективному произволу как иерархически упорядоченное множество частных целей управления, которые должны быть осуществлены в случае идеального (безошибочного) управления. Порядок следования частных целей в нём – обратный порядку последовательного вынужденного отказа от каждой из них в случае невозможности осуществления полной совокупности целей. Соответственно на первом приоритете вектора целей стоит самая важная цель, на последнем – самая незначительная, отказ от которой допустим первым. Образно говоря, вектор целей – это список, перечень того, чего желаем, с номерами, назначенными в порядке, обратном порядку вынужденного отказа от осуществления каждого из этих желаний». …
► Векторы управленческой информации
«Вектор (текущего) состояния контрольных параметров, описывающий реальное поведение объекта по параметрам, входящим в вектор целей. …
Вектор ошибки управления, представляющий собой "разность" (в кавычках потому, что разность не обязательно привычная алгебраическая): "вектор целей" - "вектор состояния". Он описывает отклонение реального процесса от предписанного вектором целей идеального режима и также несёт в себе некоторую неопределённость, унаследованную им от вектора состояния.
Образно говоря, вектор ошибки управления это – перечень неудовлетворённых желаний соответственно перечню вектора целей с какими-то оценками степени неудовлетворённости каждого из них; оценками либо соизмеримых друг с другом числено уровней, либо числено несоизмеримых уровней, но упорядоченных ступенчато дискретными целочисленными индексами предпочтительности каждого из уровней в сопоставлении его со всеми прочими уровнями.
Вектор ошибки – основа для формирования оценки качества управления субъектом-управленцем.
...
Вектор ошибки управления возникает в результате двух причин:
1. сама устойчиво функционирующая замкнутая система представляет собой колебательную систему, поэтому даже в условиях заведомого отсутствия внешних возмущений она совершает колебания относительно вектора целей (вопрос только в том, позволяет ли постановка задачи управления пренебречь этими колебаниями, либо же нет);
2. на замкнутую систему действуют внешние возмущения из окружающей среды, а в ней самой могут происходить какие-то внутренние изменения».
Перед использованием в процессе управления вектор целей необходимо проверить на отсутствие в нём дефектов: взаимно исключающих друг друга целей, нарушения порядка следования целей по приоритетности, повторение одних и тех же целей на разных приоритетах». >
* * *
Я убежден, что читатели, изучавшие ранее теорию автоматического управления и регулирования в технике, уже уловили сходство ее принципов с принципами ДОТУ. Дальше по тексту подобных «знакомых» моментов будет достаточно, чтобы с «первого захода» разобраться во всем сказанном.
Однако учитывая специфичность теории управления и ее использование лишь в относительно небольшом круге технических применений, для большей части читателей я буду комментировать и графически иллюстрировать выдержки из ДОТУ. Разъяснения и рисунки значительно уровняют читателей, знакомых и незнакомых с техническим аналогом ДОТУ, в скорости понимания рассматриваемой теории.
► Устойчивость по предсказуемости
В технической теории регулирования одной из основных задач является определение устойчивости или неустойчивости системы, а также запаса устойчивости. В ДОТУ наиболее важной характеристикой считается устойчивость по предсказуемости. Устойчивость в классическом, более узком понимании, рассматривается отдельно.
< «Ключевым понятием теории управления является понятие: устойчивость объекта в смысле предсказуемости поведения в определённой мере под воздействием внешней среды, внутренних изменений и упра-воле-ния; или, если коротко, - устойчивость по предсказуемости. Управление в принципе невозможно, если поведение объекта непредсказуемо в достаточной для этого мере».
► Полная функция управления
Если есть возможность сформировать вектор цели, вектор состояния и начальный вектор ошибки, можно приступить к процессу управления в соответствии с полной функцией управления (ПФУ).
«Полная функция управления – это своего рода пустая и прозрачная форма, наполняемая содержанием в процессе управления; иными словами, это матрица объективно возможного управления – мера управления, как процесса триединства материи-информации-меры. … Содержательным фрагментом полной функции управления является целевая функция управления, т.е. концепция достижения в процессе управления одной из частных целей, входящих в вектор целей». [15]
ПФУ выглядит как последовательность разнокачественных действий, в которой реализуется процесс управления:
«
1. Опознавание факторов среды (объективных явлений), с которыми сталкивается интеллект, во всём многообразии процессов Мироздания.
2. Формирование стереотипа (навыка) распознавания фактора на будущее.
3. Формирование вектора целей управления в отношении данного фактора и внесение этого вектора целей в общий вектор целей своего поведения (самоуправления).
4. Формирование концепции управления и частных целевых функций управления, составляющих в совокупности концепцию, на основе решения задачи об устойчивости в смысле предсказуемости поведения.
5. Организация и реорганизация целесообразных управляющих структур, несущих целевые функции управления.
6. Контроль (наблюдение) за деятельностью структур в процессе управления, осуществляемого ими и координация взаимодействия разных структур.
7. Ликвидация существующих структур в случае ненадобности или поддержание их в работоспособном состоянии до следующего использования.
Пункты «1» и «7» всегда присутствуют. Промежуточные между ними можно в той или иной степени объединить или разбить ещё более детально.
Полная функция управления может осуществляться только в интеллектуальной схеме управления, которая предполагает творчество системы управления как минимум в следующих областях: выявление факторов среды, вызывающих потребность в управлении; формирование векторов целей; формирование новых концепций управления; совершенствование методологии и навыков прогноза при решении вопроса об устойчивости в смысле предсказуемости при постановке задачи управления и (или) в процессе управления по схеме предиктор-корректор». > [15]
► Системы управления
На рисунке 6 схематически изображен один контур системы управления, осуществляющий управление по одному пункту из всего вектора целей.
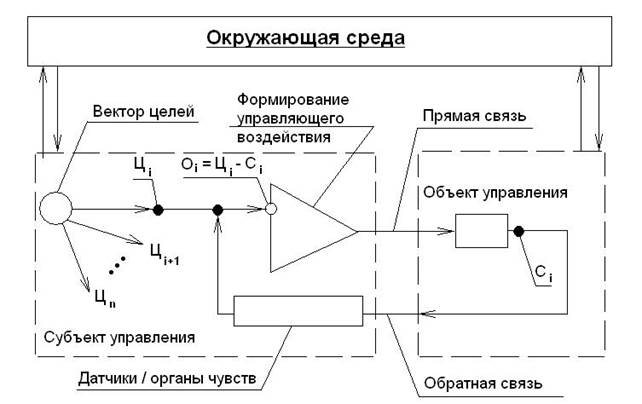
Рисунок 6 – простейший контур замкнутой системы управления, осуществляющий управление по одному из элементов вектора целей (по одной цели, по одному контрольному параметру), где Ці – элемент вектора целей, Сі – элемент вектора текущего состояния, Оі – элемент вектора ошибок, і – число элементов в любом из трех векторов
Замкнутая система – объект, находящийся в среде, и система управления им, связанные друг с другом цепями прямых и обратных связей. Отдельные элементы системы управления обычно также охвачены цепями обратной связи, иногда неявно.
В качестве примера замкнутой системы управления можно представлять себе автомобиль с водителем, цель которого – добраться из точки А в точку Б, не нарушая правил дорожного движения и не попадая в аварию в течение ограниченного времени. Можно представить и контур управления техническим объектом (например, посредством управления электрическим двигателем постоянного тока при помощи комплекта из блока числового программного управления (ЧПУ), регуляторов тока и скорости, тиристорных ключей с системой импульсно-фазового управления). А можно все те же принципы прослеживать на примере управления целым государством. В этих и других подобных случаях, информация по цепям прямой связи движется от задатчика вектора целей (от субъекта) к объекту управления, по пути при необходимости усиливаясь и преобразовываясь; может также поступать от субъекта и объекта во внешнюю среду. По цепям обратной связи информация, составляющая вектор текущего состояния, преобразовываясь по определенным законам, поступает из объекта управления обратно в объект; может поступать с выхода функционального элемента субъекта управления на его вход, из среды в субъект или объект управления.
Управление можно условно поделить по способу на структурное и бесструктурное, и по схемам управления на программное, программно-адаптивное и «предиктор-корректор». В действительности бывает эффективным сочетание различных структур и способов.
«Ошибки в построении структуры, вызывающие её общее несоответствие вектору целей и множеству допустимых векторов ошибки, могут свести практически на нет высокую функциональную пригодность элементов структуры; поэтому при функционально пригодных (хороших в этом смысле) элементах, образующих структуру, вектор ошибки управления тем не менее, будет вне допустимых пределов.
Если при этом структура создаётся до начала процесса управления, и её архитектура и элементная база не изменяются в его ходе, то характеристики вектора ошибки управления определяются прежде всего соответствием архитектуры структуры вектору целей и множеству допустимых векторов ошибки управления: это даёт основание к тому, чтобы такой способ управления назвать структурным.
При управлении структурным способом происходит адресное распространение функционально ориентированной информации по элементам структуры, неизменной в процессе управления. Примеры структурного управления в технике: управление самолётом при помощи автопилота, представляющего собой структуру разнородных элементов; командный состав любой воинской части, административный состав любого завода, института и т.п. также представляют собой структуру».
Бесструктурное управление возможно в суперсистемах, состоящих из множества аналогичных в некотором смысле друг другу элементов. Все элементы суперсистемы самоуправляемы на основе информации их памяти. Каждым из них можно управлять извне. Элементы могут управлять другими элементами, поскольку могут выдавать информацию из памяти другим элементам множества.
«Циркулярное распространение информации (одна и та же информация проходит через множество элементов), подчинённое некоторым статистическим характеристикам и разного рода оценкам возможного течения событий, несёт в себе вероятностную предопределённость изменения информационного состояния памяти элементов множества. Вероятностно предопределённое изменение состояния памяти элементов ведёт к изменению статистических характеристик их самоуправления. Если распространение информации в этом множестве и его последствия обладают устойчивой предсказуемостью в статистическом смысле, то возможно бесструктурное управление этим множеством, а также и его бесструктурное самоуправление.
…
при бесструктурном управлении множество более или менее аналогичных один другому элементов вероятностно предопределённо порождает из себя замкнутые системы, отвечающие заданному вектору целей и множеству допустимых векторов ошибки.
…
Главное отличие бесструктурного управления от структурного: структура формируется не директивно-адресно до начала процесса управления, а возникает управляемо и вероятностно предопределённо в ходе процесса управления на основе преимущественно безадресного циркулярного распространения информации».
В качестве элементарного примера приводится автобус с кассами самообслуживания (бесструктурный способ) и автобус с кондуктором (структурный способ).
Схемы управления:
1. Программное управление. По прямым связям передается заранее предопределенный сценарий управляющих воздействий без учета вектора текущего состояния. Внешние обратные связи отсутствуют, результаты управления не корректируют жестко заданную программу. Данная схема имеет ограниченный круг применений, т.к. не способна соответствующим образом реагировать даже на незначительные отклонения процесса управления от заданного вектора целей при изменении параметров среды и объекта.
2. Программно-адаптивное управление. Управляющее воздействие является функцией сигнала задания по вектору целей и сигнала обратной связи, формирующего вектор текущего состояния. Изменения состояния среды и объекта управления корректируют через обратную связь управляющий сигнал. Регулирование может происходить по возмущению или по отклонению. Например, цель системы кондиционирования – заданная температура воздуха в помещении. При регулировании по отклонению необходимость усиления или ослабления охлаждения определяется сравнением действительной температуры в помещении с заданной. Полученное рассогласование (разность, ошибка) ликвидируется с максимально возможной точностью. Недостаток – невозможность свести к пренебрежимо малым значениям вектор ошибок. Даже если архитектура системы идеально устраняет различные причины погрешностей, все равно всегда требуется ненулевое количество времени на прохождение сигнала обратной связи и выработку управляющего воздействия, ликвидирующего отклонения.
3. «Предиктор-корректор». На основании информации о текущем и предыдущих состояниях вырабатывается прогноз поведения среды и объекта. Формируется управляющее воздействие, упреждающее предсказанные отклонения или последствия отклонений. Т.о. устраняется задержка реакции системы на изменения параметров среды и объекта управления. При помощи обратных связей проверяется соответствие полученного вектора состояния вектору целей, и формируется новый прогноз и новое упреждающее воздействие: «…система управления реагирует не только на уже свершившиеся отклонения замкнутой системы от идеального режима, но и на те, которые только имеют тенденцию к осуществлению …».
Предиктор – это пред-указатель (в технике называется предсказателем) изменений на основании текущего состояния и прошлого опыта. Корректор исправляет уже возникшее рассогласование (ошибку) между пред-указанным (предсказанным) состоянием и действительным результатом управления. Это можно назвать методом экстраполяции с проверкой соответствия и коррекцией для следующего шага.
Экстраполяция – приближённое определение значений функции f(x) в точках x, лежащих вне отрезка [x0,xn], по её значениям в точках x0 < x1 <... < xn.
«Если программно-адаптивное управление замыкает прямые и обратные связи через уже свершившееся прошлое, то в схеме предиктор-корректор некоторая часть прямых и обратных связей замыкается через прогнозируемое будущее». [15]
* * *
В технических системах для формирования адекватного изменения управляющего воздействия в ответ на отклонение вектора состояния от вектора целей используется отрицательная обратная связь (ООС).
ООС – тип обратной связи, который изменяет входной сигнал таким образом, чтобы противодействовать изменению выходного сигнала. Сигнал ООС инвертирован относительно входного сигнала элемента, за счет этого происходит вычитание вектора состояния (предоставляемого обратными связями) из вектора целей (составляющего задание). Если контролируемый параметр отклоняется от заданного значения в большую сторону, сигнал ООС увеличивается, в результате управляющее воздействие уменьшается, и отклонившийся параметр возвращается к заданной величине. Если контролируемый параметр отклоняется меньшую сторону, сигнал ООС уменьшается, управляющее воздействие растет, возвращая отклонившийся параметр к заданной величине.
Существует также положительная обратная связь (ПОС), сигнал которой имеет тот же знак, что сигнал задания, поэтому рост сигнала ПОС приводит к росту величины управляющего воздействия. В свою очередь, рост управляющего воздействия приводит к увеличению значения контролируемого параметра, а значит и к новому росту сигнала ПОС. Процесс продолжается до тех пор, пока управляющее воздействие и величина контролируемого параметра данного контура управления станут максимальными.
В управлении ПОС применяется гораздо реже ООС. Часто ПОС может присутствовать в качестве незапланированной, паразитной, вызывающей неустойчивость. Тогда в цепи прямой связи или ООС необходимо включение корректирующего звена. Сочетание амплитудно-частотно-фазовых характеристик исходной схемы и корректирующего звена устраняют неустойчивость и обеспечивают заданные величины параметров качества. Подобные закономерности наблюдаются и в обществе. О коррекции систем управления и амплитудно-частотно-фазовых характеристиках можно подробнее узнать из соответствующей литературы: [16, 17, 18].
Каналы прямой связи – воздействие водителя через руль, педали и рычаги автомобиля на скорость и направление движения, поступление информации задания от ЧПУ через схемы управления и регулирования к электродвигателю, издание законов и принятие текущих решений государственной властью.
Каналы обратной связи – восприятие водителем при помощи органов чувств (в основном – зрения) показаний приборов автомобиля и ситуации на дороге, поступление сигналов (инверсных относительно сигнала задания) от датчиков тока и скорости обратно на входы соответствующих регуляторов, поступление информации об отработанном двигателем пути (в долях от полного поворота на 380º), сводки об экономических и социальных эффектах от выполнения новых законов и решений.
* * *
< «Автомобиль – объект управления. Водитель, ещё более точно, – его алгоритмика психики, – система управления. Обратные связи замкнуты через зрение, слух, осязание и вестибулярный аппарат водителя, а прямые – через его руки и ноги, воздействующие на исполнительные органы: руль, педали, рукоятку переключения передач, тумблеры и кнопки. Кроме того, иерархии замкнутых контуров прямых и обратных связей имеются в системах и устройствах автомобиля и в самом человеке. … Управление – это единая упорядоченная совокупность разнокачественных действий, осуществляемых элементами, образующими замкнутую систему, представляющую собой иерархию контуров циркуляции и преобразований информации в процессе осуществления концепции управления, образованную частными концепциями управления (целевыми функциями) в их совокупности. Управление – целостная функция: целостная в том смысле, что изъятие из неё тех или иных этапов делает данное управление невозможным, т.е. концепцию неосуществимой, а цели недостижимыми». > [15]
* * *
Поступающая по каналам (цепям) обратной связи информация из внешней среды, от объекта управления, с выходов функциональных элементов субъекта управления поступает обратно на входы источников управляющих воздействий, формируя элементы вектора текущего состояния. Если векторы управленческой информации можно представить математическими векторами, то формирование элементов вектора ошибки Оі выполняется вычитанием значений элементов вектора состояния Сі из значений элементов вектора целей Ці. Иными словами, вектор ошибки О равен разности векторов целей Ц и состояния С:
О = Ц – С;(2.2)
Оі = Ці – Сі. (2.3)
На основании получаемого вектора ошибок формируется набор управляющих воздействий.
По значениям элементов вектора ошибок определяется качество процесса управления. Чем меньше эти значения, тем выше качество управления. Т.е. чем меньше отклонение вектора состояния от вектора целей, тем лучше.
Отдельными показателями качества процесса управления могут считаться статическая ошибка установившегося режима, перерегулирование переходного процесса, время переходного процесса, колебательность переходного процесса, уровень помех в контуре регулирования.
Подробнее с показателями качества управления и прочими специфическими понятиями теории управления читатель может ознакомиться при самостоятельном прочтении ДОТУ и учебников по технической теории управления и регулирования [15, 16, 18].
Если вектор ошибок слишком велик, можно сформировать дополнительный вектор оценки качества управления. Каждый из элементов нового вектора будет показывать, превышает или нет допустимые нормы значение хотя бы одного элемента из группы элементов вектора ошибок. Для этого каждому элементу оценочного вектора ставится в соответствие целая группа близких по типу элементов вектора ошибок.
Качество управления обеспечивается архитектурой системы и качеством отдельных ее элементов, о чем не стоит забывать в управлении общественными процессами.
► Теория устойчивости
Система управления должна быть устойчивой по предсказуемости в первую очередь, но также устойчива в более узком, классическом смысле.
Устойчивость системы – свойство возвращаться в исходное состояние после отклонения ее параметров от идеальных значений, происходящего под действием внутренних или внешних возмущений. Для установившегося режима важна устойчивость "в малом", для переходного режима – устойчивость "в большом".
Устойчивость «в малом» означает, что в установившемся режиме происходят колебания параметров процесса относительно идеальных значений под действием внутренних сил, но после незначительного отклонения значения параметры процесса возвращаются к значениям, близким к исходным (заданным). Если система неустойчива "в малом", то незначительное самопроизвольное отклонение значения контрольного параметра системы вызовет процесс нарастания этого отклонения, и значение параметра будет отклоняться далее, пока не выйдет за допустимые границы. Простым техническим примером "неустойчивости в малом" является случай с обрывом цепи отрицательной обратной связи по скорости в электроприводе. В этом случае сигнал отрицательной обратной связи по скорости не приходит на вход регулятора скорости, и не формируется управляющее воздействие регулятора, возвращающее значение скорости к заданной величине при ее нарастании или снижении. Начавшееся отклонение скорости от заданного значения может неконтролируемо продолжаться сколь угодно долго. В результате будет нарушен технологический процесс или даже будет повреждена вся система. В устройстве общества подобная ситуация может сложиться при осуществлении жесткого фашистского режима, когда небольшая группа лидеров формирует строгую программу экономических, политических и социальных действий, пытается осуществить ее, не принимая во внимание реакцию населения. Не получая от населения информации для коррекции управляющих воздействий, фашистское правительство может вызвать нарастание недовольства и переворот. Когда ситуация становится критической, возникает обратная связь, сигнализирующая о необходимости радикальных мер по предотвращению свержения режима, и тогда начинаются жесточайшие массовые репрессии, усиливается пропаганда, внимание народа отвлекается на захватнические войны с соседними государствами и эксплуатацию государств-колоний. Плохой устойчивостью "в малом" обладает и феодально-раздробленное общество, в котором неразумный и алчный произвол множества феодалов легко приводит к междоусобицам и гибели государства (захвата феодов внешним противником, вымирания населения в неурожайные годы из-за отсутствия взаимопомощи и т.п.). Устойчивость различных систем "в малом" обеспечивается особенностями ее структуры, наличием отрицательных обратных связей (иногда явных, а иногда – скрытых, интегрированных в структуру и неразличимых в ней). Механический пример – шарик на дне лунки, совершающий колебания относительно центра на дне лунки. На систему действует направленная вниз сила тяжести. Вогнутость поверхности и значительная высота стенок лунки не позволяют непрерывным "фоновым" колебаниям шарика покинуть предназначенные для него границы. Такую систему можно считать моделью классической механической потенциальной ямы. Если поверхность выпуклая, а шарик находится на вершине, то это неустойчивая "в малом" система. Ничтожных "фоновых" колебаний шарика достаточно, чтобы он потерял равновесие и покатился по склону поверхности вниз.
Устойчивость «в большом» означает способность системы автоматически возвращать свои контрольные параметры к заданным величинам установившегося режима после их значительного отклонения под воздействием внешнего возмущения или запланированного переходного процесса. В системе управления электродвигателем постоянного тока при переходном процессе (например при изменении скорости двигателя с одного установившегося значения на другое) в течении небольшого отрезка времени контрольные параметры (ток и напряжение якоря, скорость) могут значительно превысить заданные для нового установившегося режима значения. В устойчивой "в большом" системе возникшие при переходном процессе отклонения быстро ликвидируются, и отклонившиеся от задания параметры в течении заданного времени принимают значения, не выходящие за установленные границы точности и соответствующие новому установившемуся режиму. В неустойчивой "в большом" системе переходный процесс заканчивается нарастающими колебаниями контрольных параметров с дальнейшим их выходом за дозволенные рамки. Это приводит к срабатыванию защитного отключения системы или к ее разрушению. Аналогичную ситуацию можно наблюдать в человеческом обществе. При устойчивой "в большом" системе управления экономические и социальные реформы переводят общество на качественно новый уровень, улучшающий различные сферы жизни, в новый установившийся режим. Неустойчивая "в большом" общественная система при попытке серьезного реформирования приводит к ухудшению и краху экономику, социальную сферу, все это сопровождается падением нравственности, ростом недовольства и заканчивается бесполезным переворотом, гражданской войной, поражением перед внешним противником и т.п. бедствиями. Макромеханическая модель «твердая поверхность-выпуклость или поверхность-лунка с шариком под действием силы тяжести», подходящая для демонстрации «устойчивости в малом», подходит и для демонстрации «устойчивости в большом». Если система неустойчива «в малом», то она неустойчива и «в большом»: с вершины выпуклой поверхности шарик скатывается как под действием небольших «фоновых» возмущений, так и под действием значительных внешних возмущающих сил. Если в ходе переходного процесса из установившегося режима на дне лунки шарик получает импульс и перемещается на вершину выпуклости, то вместо нового установившегося режима происходит его скатывание вниз в одном из недетерминированных управленцем направлений. Лунка будет образовывать с помещенным в нее шариком устойчивую «в большом» систему, если ее стенки достаточно высоки. Передаваемый шарику импульс конечен, и его недостаточно для выброса шарика за границы достаточно высоких стенок лунки. Шарик во время переходного процесса получает импульс и перескакивает из одной лунки в другую через край разделяющей их стенки. Если система устойчива «в большом», шарику не хватит энергии для перескакивания через стенку второй лунки, его колебания будут затухающими, и со временем наступит новый установившийся процесс. Остающееся расстояние от максимально возможной точки подскакивания шарика до вершины стенки – запас устойчивости системы. Если стенки второй лунки недостаточно высоки, система неустойчива «в большом», и шарик выскочит за границы предназначенной для него лунки, цель управления не будет достигнута.
Существует множество способов определения устойчивости/неустойчивости системы по ее математической модели, эти способы подробно описаны в специальной технической литературе. Иллюстрации к классическому понятию устойчивости приведены на рисунке 7.
Рисунок 7 – простейшие примеры устойчивости и неустойчивости:
а) устойчивость в малом;
б) неустойчивость в малом;
в) устойчивость в большом;
г) неустойчивость в большом;
д) переходный процесс в устойчивой системе, где:
Х – контрольный параметр;
t – время;
σ – перерегулирование, не превышающее допустимого (динамическая ошибка);
tпп – время переходного процесса (до вхождения контрольного параметра в заданные границы статической ошибки);
δ – статическая ошибка, равная отклонению установившегося значения выходной величины от заданного значения после завершения переходного процесса;
е) переходный процесс в неустойчивой системе, заканчивающийся выходом динамической ошибки за допустимые пределы и за пределы разрушения системы.
После изложения наиболее общих понятий, моделей, методов, ДОТУ подробно рассматривает прикладной алгоритм поиска оптимального пути достижения поставленных целей.
Этот алгоритм носит название " метод динамического программирования ".
"В задаче требуется найти последовательность шаговых управлений и траекторию, которым соответствует максимальный из возможных полных выигрышей".
Метод заимствован из прикладной математики, и рекомендуется для решения любых задач управления.
< Для вхождения в управление и осуществления его по полной функции с использованием метода динамического программирования и других данных в КОБ знаний, есть определенная последовательность действий. Сначала необходимо остановить панику, суету, беспорядочную деятельность, и принять к вниманию вектор текущего состояния.
После нужно мысленно проследить за изменениями вектора состояния в прошлом на как можно более длительном участке времени, выявить причинно-следственные связи, позитивные и негативные результаты предыдущих событий.
Теперь можно выделить иерархически наивысшее управление, соотнести его со всеми позитивными результатами в прошлом, и решить прогнозную задачу многовариантного возможного течения событий.
"Устраняй зло тем, что есть лучшего.... Бог даёт доказательство Своего бытия непосредственно каждому, отвечая молитве в соответствии с её смыслом «Языком» жизненных обстоятельств, к которому необходимо быть внимательным, чтобы понять смысл его «фраз»". >
* * *
В ДОТУ понятию установившегося режима соответствует термин «балансировочный режим», понятию переходный режим (процесс) – термин «маневр».
< «Устойчиво управляемая система может находиться либо в балансировочном режиме, либо в режиме манёвра. Один и тот же, реально протекающий режим может быть интерпретирован и как балансировочный, если соотноситься с одним вектором целей, и как режим маневра, если соотноситься с другим вектором целей.
В векторе целей балансировочного режима контрольные параметры неизменны во времени. В реальном устойчивом балансировочном режиме вектор состояния колеблется относительно неизменного положения в подпространстве контрольных параметров, а свободные параметры могут при этом изменяться по-всякому.
Понятие «балансировочный режим» несколько сродни понятию «равновесие», но шире его, поскольку обыденное сознание воспринимает «равновесие» статично – как неподвижную неизменность во времени. В балансировочном же режиме во времени неизменен процесс колебаний системы относительно точки «равновесия», координаты которой неизменны во времени: система проходит через неё, но не может пребывать в ней, хотя бы потому, что отклонения от неё – ниже порога чувствительности средств измерения или управление негибко, обладает конечным быстродействием и не может вовремя остановиться.
…
по причине конечного быстродействия системы управления её воздействие, компенсирующее отклонение от идеального режима (при отрицательных обратных связях), с какого-то момента времени само становится возмущающим и объект проходит точку идеала. Так система управления сама раскачивает объект относительного идеального режима вектора целей
…
В векторе целей режима манёвра изменяется хотя бы один из контрольных параметров. При рассмотрении реального процесса устойчивого манёвра в подпространстве контрольных параметров вектор состояния отслеживает с некоторой ошибкой управления изменение вектора целей (содержащего только контрольные параметры).
…
Перевод замкнутой системы из одного балансировочного режима в другой – наиболее часто встречающийся вид маневра». >
► Суперсистемы и эгрегоры
< В управлении обществом речь идет об управлении в суперсистеме. Человек – элемент этой суперсистемы.
«… суперсистема – множество элементов, хотя бы частично функционально аналогичных друг другу в некотором смысле и потому хотя бы отчасти взаимозаменяемых. Кроме того, все её элементы самоуправляемы (или управляемы извне) в пределах иерархически высшего объемлющего управления на основе информации, хранящейся в их памяти; каждым самоуправляемым элементом можно управлять извне, поскольку все они могут принимать информацию в память; каждый из них может выдавать информацию из памяти другим элементам своего множества и окружающей среде и потому способен к управлению, и (или) через него возможно управление другими элементами и окружающей средой; все процессы отображения информации как внутри элементов, так и между ними в пределах суперсистемы и в среде, её окружающей, подчинены вероятностным предопределённостям, выражающимся в статистике».
В общественной суперсистеме каждый человек является носителем различных эгрегоров. >
Эгрегор – «коллективное сознание» группы людей. Его природу диалектический материализм объяснил бы с точки зрения материалистической общественной науки (как составляющую общественных отношений – «эгрегор» класса, «эгрегор» религиозной секты и т.п.), но этот термин в таком случае оказывается практически излишним. В КОБ считается, что эгрегор – материальное образование, полученное слиянием «биополей» отдельных людей. Это элемент вульгарного материализма, предшествовавшего диалектическому. Сознание по КОБ представляет собой не процесс отражения человеком объективной реальности, а физическую субстанцию. Конечно, иногда устаревшие модели объяснения явлений пригодны для практики. Так, науке давно известна квантовая природа электромагнитного поля, однако для прикладных расчетов удобнее пользоваться старой, более грубой моделью непрерывного поля Максвелла [19]. Но в нашем случае устаревшие взгляды несут лишь заблуждения, современная общественная наука не нуждается ни в вульгарном материализме, ни в категории эгрегора. Сегодня уместно использовать понятия классовых интересов, мифологического, религиозного и материалистического мировоззрения, политических и религиозных убеждений, умножения интеллектуальной рабочей силы при коллективном процессе труда и т.д.
< «По отношению к эгрегорам положение большинства людей – быть батарейками: подпитывать их своей энергией, необходимой для осуществления целей хозяев и менеджеров эгрегоров. Через «подключки» каждый субъект отдает эгрегорам свою энергию, и через те же «подключки» эгрегор и его менеджеры воздействуют на всех «подключённых», вследствие чего все они в большей или меньшей мере не располагают собой» > [20].
Возможно, читатель замечал, что иногда наши коллеги, друзья, любимые, совершенно не знакомые друг с другом, ведут себя абсолютно идентично в сходных ситуациях. Бывает, два, три и более незнакомых друг с другом человек говорят нам одни и те же наборы фраз в разное время и при разных обстоятельствах. Логично далее предположить, что каждый из нас может так выглядеть со стороны. Это якобы и есть одно из проявлений принадлежности группы людей к общему эгрегору, который не обладает собственным разумом и волей, но дает каждому носителю характерную алгоритмику мышления и действий.
< Эгрегориальное сознание группы людей мощнее сознания любого отдельного человека. В свою очередь, сознание Бога несоизмеримо с сознанием людей и эгрегоров.
Пытаясь получить от Бога подсказки на языке жизненных обстоятельств, человек рискует подключиться к вредоносному эгрегору. Чтобы отличать ответы Бога от ответов эгрегора, нужно проследить за последствиями учета этих ответов. Если результаты стабильно положительные, значит человек получает помощь от Бога. Если результаты негативные, или чередующиеся по последствиям, это эгрегор навязывает человеку вредные подсказки. Во время молитв, отшельничества, медитаций, сна и т.д. при правильном подходе возможно получение информации извне (от Бога или эгрегора как обособленных сущностей), а при неправильном подходе (с использованием наркотиков, во время болезни и т.д.) можно принять за получение информации обыкновенные галлюцинации. В храмах и прочих местах скопления людей, «сигнал» от бога «зашумлен помехами», и диалог с Богом либо невозможен, либо подменен «сигналом» эгрегора.
«Лучше управляет (собой, прежде всего) тот, кто отличает иерархически Наивысшее управление от внешнего или внутреннего наваждения и не препятствует Высшему, а осознанно снизводит Его волю вниз по контурам внутриобщественного управления как милость, ускоряя процесс перехода к человечности, делая его прямым восхождением, а не мучительной цепью падений, топтаний на месте и валяний во всевозможной грязи; не говоря уж о том, что недостойно, располагая возможностями человека, сознательно уклониться от своего долга перед другими в Объективной Реальности, продолжая оставаться человекообразным недолюдком и зная это. Но такое упорствование при знании о своём несоответствии уже занятому фактически положению самоубийственно». >
Дата публикования: 2014-11-19; Прочитано: 1156 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
