 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Функции 3 страница
|
|
 Функцию выходов
Функцию выходов  определим следующим образом. Если в автомате Мура δA(am, zf) = as и λ а(as) = wg, то в автомате Мили
определим следующим образом. Если в автомате Мура δA(am, zf) = as и λ а(as) = wg, то в автомате Мили 
Переход от автомата Мура к автомату Мили при графическом способе их задания проиллюстрируем рисунком (см. рис. 26):
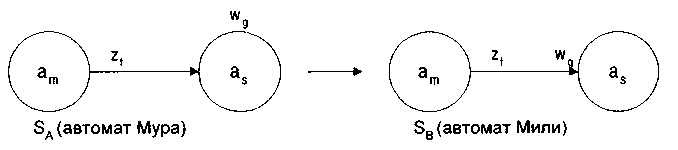
Рис. 26
Как следует из рисунка, выходной сигнал  записанный рядом с вершиной
записанный рядом с вершиной  переносится на все дуги, входящие в эту вершину.
переносится на все дуги, входящие в эту вершину.
Пример. Задан автомат Мура  в виде графа (см. рис.27), построить эквивалентный ему автомат Мили
в виде графа (см. рис.27), построить эквивалентный ему автомат Мили  (см. рис. 28).
(см. рис. 28).

Рис. 27

Рис. 28
При табличном способе задания автомата  : таблица переходов
: таблица переходов  совпадает с таблицей переходов автомата
совпадает с таблицей переходов автомата  а таблица выходов
а таблица выходов  получается из таблицы переходов заменой символа
получается из таблицы переходов заменой символа  стоящего на пересечении строки
стоящего на пересечении строки  и столбца
и столбца  символом выходного сигнала
символом выходного сигнала  отмечающего столбец
отмечающего столбец  в таблице переходов автомата
в таблице переходов автомата 
Из самого способа построения автомата Мили  очевидно, что он эквивалентен автомату Мура
очевидно, что он эквивалентен автомату Мура  Действительно, если некоторый входной сигнал
Действительно, если некоторый входной сигнал  поступает на вход автомата
поступает на вход автомата  находящегося в состоянии
находящегося в состоянии  то он перейдёт в состояние
то он перейдёт в состояние  и выдаст выходной сигнал
и выдаст выходной сигнал  Но соответствующий автомат Мили
Но соответствующий автомат Мили  из состояния
из состояния  также перейдет в состояние
также перейдет в состояние  поскольку
поскольку  и выдаст тот же выходной сигнал
и выдаст тот же выходной сигнал  согласно способу построения функции
согласно способу построения функции  Т.о., для входной последовательности длиной в одну букву, поведения автоматов
Т.о., для входной последовательности длиной в одну букву, поведения автоматов  полностью совпадают. По индукции нетрудно показать, что любое входное слово конечной длины, поданное на входы автоматов
полностью совпадают. По индукции нетрудно показать, что любое входное слово конечной длины, поданное на входы автоматов  установленных, в состояния
установленных, в состояния  вызовет появление одинаковых выходных слов и, следовательно, автоматы
вызовет появление одинаковых выходных слов и, следовательно, автоматы  и
и  эквивалентны.
эквивалентны.
Теперь рассмотрим трансформацию автомата Мили в автомат Мура, причем это преобразование будем выполнять для двух видов автомата Мили:
а) автомат Мили не содержит преходящих состояний;
б) автомат Мили имеет состояние  являющееся переходящим.
являющееся переходящим.
Под преходящим будем понимать состояние, в которое при представлении автомата в виде графа не входит ни одна дуга, но которое имеет, по крайней мере, одну выходящую дугу.
Итак, пусть задан автомат Мили:
 реализует отображение
реализует отображение  - отображение
- отображение
 - начальное состояние. Построим автомат Мура:
- начальное состояние. Построим автомат Мура:  у которого
у которого 
Для определения Ав каждому состоянию  поставим в соответствие множество
поставим в соответствие множество  всевозможных пар вида
всевозможных пар вида  (см. рис. 29), где
(см. рис. 29), где  - выходной сигнал, приписанный входящей в
- выходной сигнал, приписанный входящей в  дуге:
дуге:


Рис. 29
Число элементов в множестве  равно числу различных выходных сигналов на дугах автомата
равно числу различных выходных сигналов на дугах автомата  входящих в состояние
входящих в состояние 
Множество состояний автомата  получим как объединение множеств
получим как объединение множеств 

Функции выходов  и переходов
и переходов  определим следующим образом. Каждому состоянию автомата Мура
определим следующим образом. Каждому состоянию автомата Мура  представляющему собой пару вида
представляющему собой пару вида  поставим в соответствие выходной сигнал
поставим в соответствие выходной сигнал  Если в автомате Мили
Если в автомате Мили  был переход
был переход  и при этом выдавался выходной сигнал
и при этом выдавался выходной сигнал  то в
то в  будет переход из множества состояний
будет переход из множества состояний  порождаемых
порождаемых  в состояние
в состояние 
 под действием входного сигнала Проиллюстрируем переход от модели Мили к модели Мура с помощью рис. 30.
под действием входного сигнала Проиллюстрируем переход от модели Мили к модели Мура с помощью рис. 30.

Рис. 30
В качестве начального состояния а1в можно взять любое из состояний множества  которое порождается начальным состоянием
которое порождается начальным состоянием  автомата
автомата  Напомним, что при сравнении реакций автоматов
Напомним, что при сравнении реакций автоматов  и
и  на всевозможные входные слова не должен учитываться выходной сигнал в момент t = 0, связанный с состоянием
на всевозможные входные слова не должен учитываться выходной сигнал в момент t = 0, связанный с состоянием  автомата
автомата 
Пример. Выполнить преобразование автомата Мили  заданного а виде графа (см. рис. 31), в автомат Мура
заданного а виде графа (см. рис. 31), в автомат Мура 
В автомате Мили: 


определяются графом автомата.
В эквивалентном автомате Мура: 

Построим множество  для чего найдем множества пар, порождаемых каждым состоянием автомата
для чего найдем множества пар, порождаемых каждым состоянием автомата  обозначим их для краткости символами:
обозначим их для краткости символами: 



Рис. 31
С каждым состоянием, представляющим собой пару, отождествим выходной сигнал, являющийся вторым элементом этой пары:

Функция  строится следующим образом. В автомате Sa из состояния
строится следующим образом. В автомате Sa из состояния  есть переход под действием сигнала
есть переход под действием сигнала  в состояние
в состояние  с выдачей
с выдачей  следовательно, из множества состояний
следовательно, из множества состояний  порождаемых
порождаемых  в автомате
в автомате  (см. рис. 32) должен быть переход в состояние
(см. рис. 32) должен быть переход в состояние  под действием сигнала
под действием сигнала  Аналогично, из состояний
Аналогично, из состояний  должен быть переход в состояние
должен быть переход в состояние  под действием сигнала
под действием сигнала  и т.д. В качестве начального состояния можно выбрать любое из
и т.д. В качестве начального состояния можно выбрать любое из 

Рис. 32
Рассмотрим теперь второй вариант преобразования автомата Мили в автомат Мура, когда состояние  у первого из них - преходящее (см. рис. 33).
у первого из них - преходящее (см. рис. 33).
Как и в предыдущем примере определяем число состояний автомата Мура:


Рис. 33
К множеству пар - состояний автомата Мура добавим состояние  порождаемое преходящим состоянием a1, считая, что выходной сигнал в состоянии
порождаемое преходящим состоянием a1, считая, что выходной сигнал в состоянии  не определен. Функцию переходов
не определен. Функцию переходов  определим как в предыдущем примере, в частности из состояния
определим как в предыдущем примере, в частности из состояния  будут переходы в
будут переходы в  под действием сигнала
под действием сигнала 
 под действием
под действием  Так как
Так как  - начальное состояние автомата Мили, то в качестве начального состояния автомата Мура следует взять порождаемое им состояние
- начальное состояние автомата Мили, то в качестве начального состояния автомата Мура следует взять порождаемое им состояние  Граф автомата Мура
Граф автомата Мура  эквивалентный автомату Мили
эквивалентный автомату Мили  имеет вид, показанный на рис. 34.
имеет вид, показанный на рис. 34.

Рис. 34
Эквивалентность автоматов Sa и Sb при преобразовании автомата Мили в автомат Мура на множестве входных слов конечной длины легко доказать по индукции подобно изложенному выше при обратном преобразовании.
Рассмотренные методы взаимной транспозиции моделей Мили и Мура показывают, что при переходе от
автомата Мура к автомату Мили число состояний автоматов не меняется, тогда как при обратном переходе число состояний в автомате Мура, как правило, возрастает. Поэтому, если вновь вернуться к автомату Мили, мы получим автомат эквивалентный первому автомату Мили, но с большим числом состояний. Поэтому имеет место задача нахождения минимального автомата, т.е. автомата с минимальным числом состояний, в классе эквивалентных между собой автоматов.
4.6. Минимизация полностью определенных автоматов Мили
Алгоритм Ауфенкампа Хона. Основная идея метода состоит в разбиении всех состояний исходного автомата на попарно не пересекающиеся классы эквивалентных состояний и замене каждого класса эквивалентности одним состоянием. Минимальный автомат имеет столько состояний, сколько классов эквивалентности получено в разбиении.
Два состояния автомата  и
и  называются эквивалентными
называются эквивалентными  если
если  для всевозможных входных слов
для всевозможных входных слов  Состояния
Состояния  и
и  эквивалентны
эквивалентны  если
если  для всевозможных входных слов
для всевозможных входных слов  длины
длины 
Введенные отношения эквивалентности и  эквивалентности рефлексивны, симметричны и транзитивны, следовательно, они являются отношениями эквивалентности и могут быть использованы для разбиения множества
эквивалентности рефлексивны, симметричны и транзитивны, следовательно, они являются отношениями эквивалентности и могут быть использованы для разбиения множества  состояний автомата на непересекающиеся классы. Соответствующие разбиения на классы эквивалентных и k-эквивалентных состояний будем обозначать,
состояний автомата на непересекающиеся классы. Соответствующие разбиения на классы эквивалентных и k-эквивалентных состояний будем обозначать,  разбиение
разбиение  позволяет определить
позволяет определить
избыточные элементы в множестве состояний  Если каждый класс эквивалентности содержит только одно состояние, множество
Если каждый класс эквивалентности содержит только одно состояние, множество  несократимо. Если один или несколько классов содержат более одного элемента, то все элементы, кроме одного в каждом классе могут быть исключены из множества
несократимо. Если один или несколько классов содержат более одного элемента, то все элементы, кроме одного в каждом классе могут быть исключены из множества 
Рассмотрим минимизацию числа состояний автомата Мили.
Пример. Задан автомат Мили таблицами переходов (табл. 12) и выходов (табл. 13). Необходимо минимизировать число его состояний.


По таблице выходов получаем разбиение  на классы одноэквивалентных состояний, объединяя в эквивалентные классы одинаковые столбцы:
на классы одноэквивалентных состояний, объединяя в эквивалентные классы одинаковые столбцы: 

Строим таблицу  -разбиения (табл. 14).
-разбиения (табл. 14).

Строим таблицу  разбиения (табл.15):
разбиения (табл.15): 


Аналогично строим разбиение  (табл. 16):
(табл. 16): 

Строим  разбиение:
разбиение:  Мы видим, что разбиение
Мы видим, что разбиение  совпадает с
совпадает с  разбиением, следовательно, процедура разбиения завершена. Разбиение
разбиением, следовательно, процедура разбиения завершена. Разбиение  есть разбиение множества состояний автомата Мили (исходного) на классы эквивалентных между собой состояний. Выбирая произвольно из каждого класса
есть разбиение множества состояний автомата Мили (исходного) на классы эквивалентных между собой состояний. Выбирая произвольно из каждого класса 
 по одному состоянию, получим множество
по одному состоянию, получим множество  множество состояний минимального автомата Мили. Например,
множество состояний минимального автомата Мили. Например,  "Лишние" состояния
"Лишние" состояния 
 удаляем из исходных таблиц переходов и выходов, при этом получаем таблицы переходов (табл. 17) и выходов (табл. 18) минимального автомата.
удаляем из исходных таблиц переходов и выходов, при этом получаем таблицы переходов (табл. 17) и выходов (табл. 18) минимального автомата.

При минимизации полностью определенных автоматов Мура вводится понятие 0-эквивалентности состояний и рассматривается разбиение множества состояний на 0-классы. 0-эквивалентными называют любые одинаково отмеченные состояния автоматов Мура. Если два 0-эквивалентных состояния любым входным сигналом переводятся в два 0-эквивалентных состояния, то они называются 1-эквивалентными. Все дальнейшие классы эквивалентности состояний для автоматов Мура определяются аналогично приведенному выше алгоритму минимизации для автомата Мили.
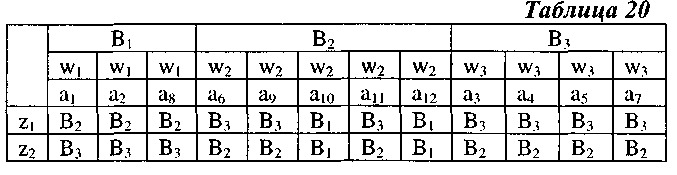
Пример. Задан автомат Мура отмеченной таблице переходов (табл. 19). Необходимо минимизировать число его состояний.

Строим  - разбиение (табл. 20):
- разбиение (табл. 20):



Строим  - разбиение (табл. 21):
- разбиение (табл. 21):


Строим  - разбиение:
- разбиение:

В результате получаем отмеченную таблицу переходов минимального автомата Мура (табл. 22):

4.7. Структурный автомат
В отличие от абстрактного автомата, имеющего один вход и один выход, на которые поступают сигналы во входном  и выходном
и выходном  алфавитах, структурный автомат имеет входные
алфавитах, структурный автомат имеет входные  и выходные
и выходные  полюса (см. рис.35), на каждом из которых сигнал может принимать два значения: 0 или 1.
полюса (см. рис.35), на каждом из которых сигнал может принимать два значения: 0 или 1.

Рис. 35
Таким образом, входному сигналу  абстрактного автомата соответствует некоторый вектор
абстрактного автомата соответствует некоторый вектор  компонента, которого
компонента, которого  равна нулю или единице, т.е. входному сигналу на полюсе,
равна нулю или единице, т.е. входному сигналу на полюсе,  а число компонент
а число компонент  равно числу входных полюсов. Для представления (кодирования) входных сигналов
равно числу входных полюсов. Для представления (кодирования) входных сигналов  абстрактного автомата различными векторами должно быть выполнено условие:
абстрактного автомата различными векторами должно быть выполнено условие:  - ближайшее большее целое число.
- ближайшее большее целое число.
Точно так же выходному сигналу  абстрактного автомата соответствует некоторый вектор
абстрактного автомата соответствует некоторый вектор  каждая компонента, которого
каждая компонента, которого  равна нулю или единице, т.е. выходному сигналу на полюсе,
равна нулю или единице, т.е. выходному сигналу на полюсе,  а число компонент
а число компонент  равно числу выходных полюсов. Для кодирования выходных сигналов
равно числу выходных полюсов. Для кодирования выходных сигналов  абстрактного автомата различными векторами должно быть выполнено условие
абстрактного автомата различными векторами должно быть выполнено условие 
Закодируем входные и выходные сигналы абстрактного автомата, заданного таблицами 23 и 24.

Так как число входных сигналов этого автомата равно трем, а выходных - шести, в структурном автомате достаточно иметь два входных  и три выходных
и три выходных  полюса. Пусть, например, входным сигналам абстрактного автомата соответствуют коды:
полюса. Пусть, например, входным сигналам абстрактного автомата соответствуют коды:

Если абстрактный автомат был лишь математической моделью дискретного устройства, то в структурном автомате учитывается структура входных и выходных сигналов автомата, а так же его внутреннее устройство на уровне структурных схем. Структурным синтезом занимается структурная теория автоматов, основной задачей которой является построение логической схемы автомата из элементарных автоматов, принадлежащих заранее заданному конечному числу типов.
На этапе структурного синтеза принято представлять автомат в виде двух частей: памяти и комбинационной схемы (см. рис 36)
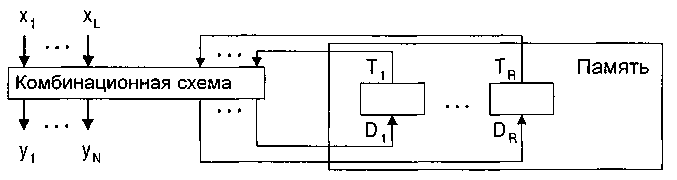
Рис. 36
Память автомата состоит из предварительно выбранных элементов памяти - элементарных автоматов Мура  Мы будем использовать один из самых простых и довольно распространенных элементов памяти —
Мы будем использовать один из самых простых и довольно распространенных элементов памяти —  -триггер с двумя входами: информационным
-триггер с двумя входами: информационным  и синхронизирующим
и синхронизирующим  Условное изображение таблица работы
Условное изображение таблица работы  -триггера имеют вид:
-триггера имеют вид:

В D-триггере, как и во всех автоматах Мура, используемых в качестве элементов памяти, каждое состояние отмечено своим, отличным от других, выходным сигналом, что позволяет отождествлять его состояние и выходные сигналы. Другими словами, если триггер находится в состоянии 0 или 1, то с его выхода снимается сигнал 0 или 1 соответственно. Поэтому вместо отмеченной таблицы переходов используется для описания работы элементарного автомата просто таблицы переходов  -триггеров. Вход С в этой таблице опущен, но имеется в виду, что изменение состояния
-триггеров. Вход С в этой таблице опущен, но имеется в виду, что изменение состояния  -триггера возможно лишь при наличии единицы на входе С.
-триггера возможно лишь при наличии единицы на входе С.
Дата публикования: 2014-11-03; Прочитано: 478 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
